|
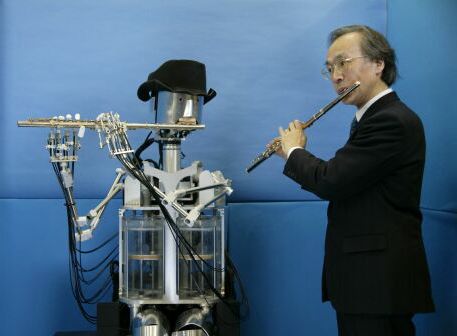
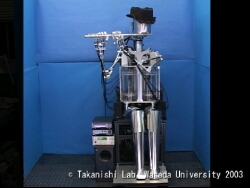
| 高西研究室では、人の心身のメカニズムを追及し、人間とロボットの共生を目指してヒューマノイドロボットの研究開発を行っています。その中で人間と情緒や感性レベルでの交流を行うことは、ヒューマノイドロボットの重要な機能のひとつであると考えています。私達はそのような交流の場として音楽空間に着目し、楽器を演奏する時のの人間の各器官の働きを機械モデルにより再現した人間形フルート演奏ロボットの開発を行い、人間の楽器演奏のメカニズムと、人間とロボットとの音楽空間における交流を工学的視点に立って追究しています。 人間形フルート演奏ロボットの開発は1990年に開始され、まず基本的な演奏を行うためのハードウェアの設計と、MIDI伴奏同期システムの構築を中心に開発を行い、フルート演奏における人体各器官の機能を可能な限り忠実に再現しています。 また、プロフルート奏者の若松久仁光氏をテクニカルアドバイザーに迎え、演奏の表現力向上とロボットの自律性の向上を目指した研究(吹鳴音探索など)、人間とロボットのインタラクションについての研究も行っています。 最近の研究では、人間の演奏を模倣することに関する研究も行っています。これまでの研究については以下のページをご覧下さい。 |
||
| 人間形フルート演奏ロボットWF-3RIXのページへ | |||
| フルートロボットの公演活動紹介ページへ |
 |
||
 |
 |
|||
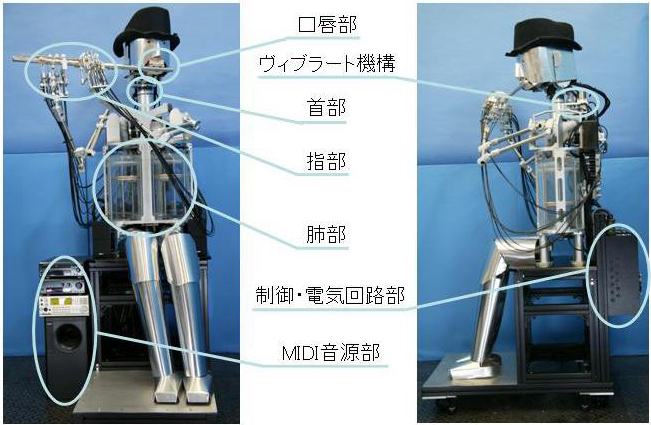
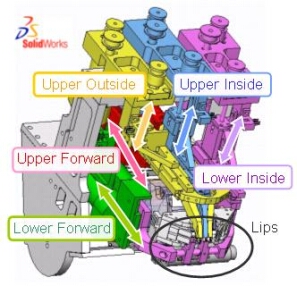
| 口唇部はフルートの吹鳴音に最も影響があります。唇の素材に低弾性ゴムを使い、それを変形させることでフルートに送り込む空気ビームの形状を制御します。 WF-4の口唇部はWF-3の機構から、新しいものになりました。WF-3に比べて機構の自由度が増え、動きも高精度になったことで、音質の良いフルートの吹鳴を実現しました。さらにWF-3では良い音で演奏するために、演奏中にフルートを頻繁に回転させて音を調整していましたが、WF-4は口唇部の動きだけで良い音で演奏をすることができます。 |
||||
 |
 |
|||
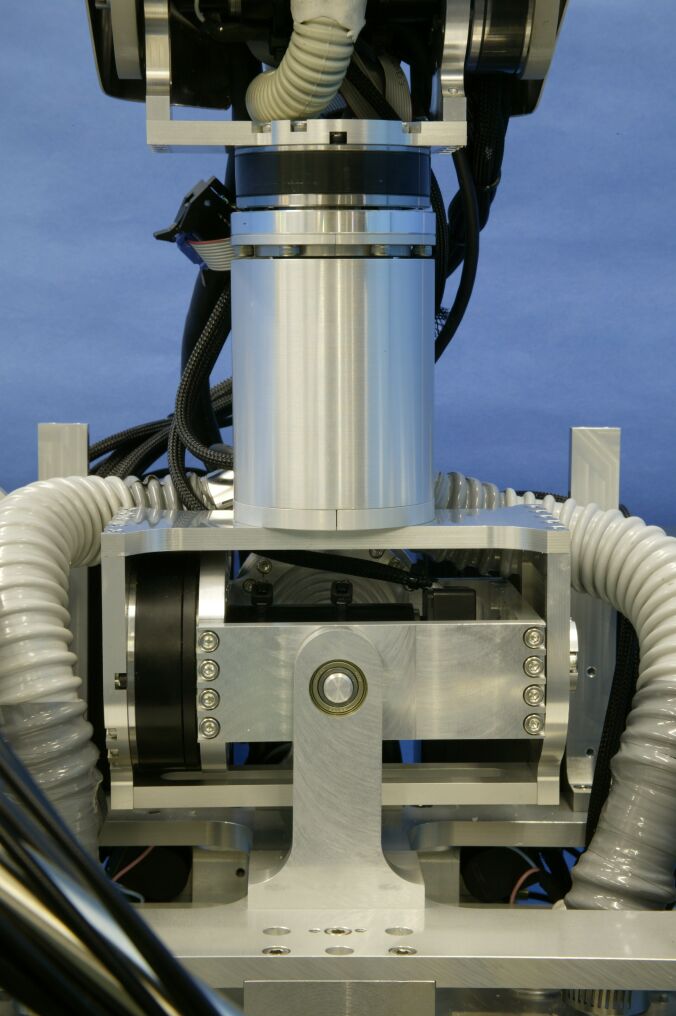
| 首部は、4自由度(4つのサーボモータ)で構成されています。首部はフルートを演奏するために、高精度で広範囲にわたる口唇部の姿勢制御をしなくてはなりませんが、ハーモニックドライブギアを用いてそれを実現しました。人間と同じように斜めにフルートを構えることが出来ます。 肺部は、人間のように左右に分かれており、2つのピストンシリンダで構成されています。2つの肺の合計容量は成人男性とほぼ同等の8リットルです。ピストンを上下に動かすための機構をシリンダ内部に設置することで、肺部全体の小型化に成功しました。 |
||||
 |
 |
|||
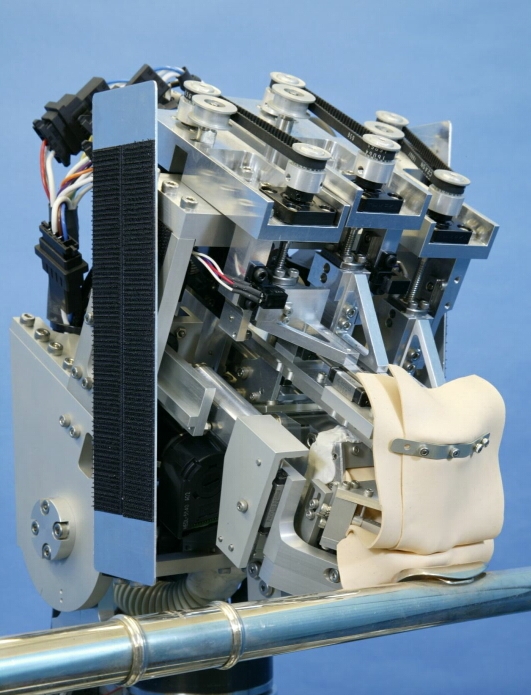
| ヴィブラート機構は、肺から送り出される空気の通り道であるゴムチューブを押すことで吹鳴音に影響を与えます。アクチュエータとしてヴォイスコイルモータを使うことで小型化・軽量化に成功。結果、首と一体化させ、人間に近い外見を実現しました。 指部は、WF-3と同じ機構のものを搭載しています。1秒間に8回の開閉動作ができる高速な指使いが可能です。また、新たに指部にフルートマウント部材を取り付けたので、指部だけでフルートの保持を可能としました。 |
||||
 |
||||
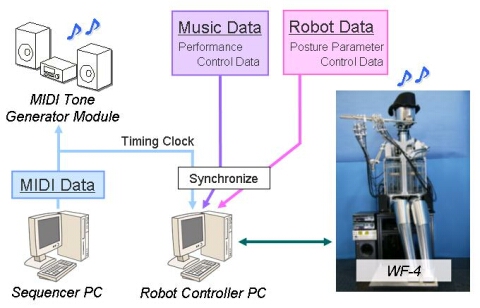
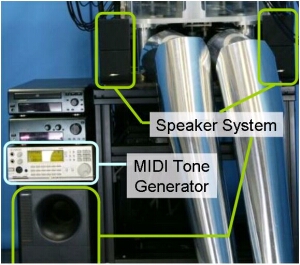
| 電気回路部には各部のDCモータを駆動するためのドライバや、スイッチやエンコーダなどの各種センサ信号をPCへと送るためのターミナル回路があります。 MIDI音源部は、ロボットがフルートを演奏するときの伴奏をロボットの下部に備え付けてあるスピーカ(左右2本とウーハー1本)から鳴らします。伴奏はMIDIデータにより、MIDI音源を使って演奏しています。詳しくは演奏システムで紹介します。 |
||||
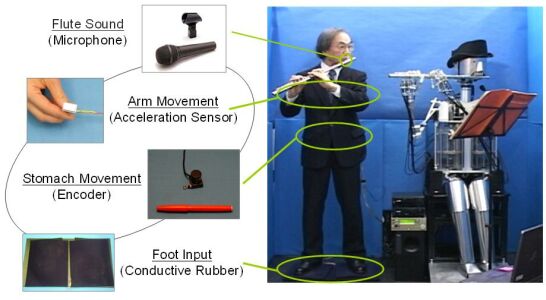
| WF-4は自身でフルートを演奏するだけでなく、伴奏に合わせて演奏したり、人間のフルート演奏者の演奏の変化に合わせて演奏したり、聞いた演奏を模倣して演奏することができます。人間のフルート奏者との共演の時には、フルート奏者の動きをセンサで感知して、動きに応じて演奏を変化させます。演奏の模倣では人間のフルート演奏音を解析し、その特徴量を取り出してロボットの演奏用のデータに反映させて模倣演奏を行っています。 | ||
 |
|||
| WF-4は、人間が演奏したフルートの音を聞き、模倣演奏する能力をもっています。フルート奏者の演奏音の音圧レベルの変化から、タイミングや息継ぎ点、ビブラートの様子などの特徴量を取り出し、そこからロボット用の演奏データ(ミュージックデータ)を自動的に生成します。この人間の演奏の特徴を反映したデータによって、ロボットは人間を模倣した表現力の高い演奏を行います。プロフルーティストの上手な演奏だけでなく、アマチュアが演奏したあまり上手でない演奏も、その特徴をとらえた模倣演奏をすることが出来ます。 | |||
 |
WF-4によるフルート演奏(mpg形式/8885KB) (画像をクリックするとムービーが見れます) プロフルーティストの演奏を模倣した演奏です。 [ フルートカルテット Ktv.298 ] (モーツァルト作曲) |
||
| 謝辞 | |||
| 本研究は早稲田大学ヒューマノイド研究所のもとで、岐阜県からの委託であるWABOT-HOUSEプロジェクトにより行われました。ここに感謝の意を表します。 |
|||
| 早稲田大学ヒューマノイド研究所 | |||
早稲田大学WABOT-HOUSE研究所 |
| Last update 2003.11.28 copyright (c) 2003-2004 team FLUTE / Takanishi laboratory All rights reserved. |
||