|
オーラル班 WAO-2 (Waseda Asahi Oral-Rehabilitation Robot No.2 |
_最終版1st.jpg)
|

仕様
WAO-2は、オーラルリハビリテーションロボットの実用化モデルとして製作されたものです。 WAO-1Rにおいて確立されたマッサージ軌道を出力するマニピュレータの自由度数の再検討、および遺伝的アルゴリズムを用いた 最適化設計を行いました。また、マッサージを受ける患者の姿勢が仰臥位、座位にも対応できる設計になりました。 これにより、小型化に成功し、幅広い医療現場での活躍が期待されます。
自由度数の削減
WAO-1Rでは、2本のマニピュレータはそれぞれ6自由度を有しておりましたが、マニピュレータ先端の姿勢の自由度が動きが少なく、
実際のマッサージ効果には影響しない可能性がありました。そこで、マニピュレータ先端の姿勢の自由度を
固定させた場合と変化させた場合でマッサージを、健常者6人に対し行いました。VASを用いたアンケートの結果、両者に有意差が見られませんでした。
また、共同研究をさせていただいている医師の方々から、姿勢の自由度の必要性がないとの意見をいただいたので、WAO-2のマニピュレータ自由度数は
片腕3にすることにしました。今回設計した自由度配置図を以下に示す。
 |
| Fig.1 WAO-1R仕様 |
今回は回転系の自由度を配置するため、以下のような問題点が存在します。
相反する項目が存在する。 特異点の回避の必要がある。
そこで以下のような評価関数を定め、この値が最小になるようなL1,L2を遺伝的アルゴリズムを用いて求めました。
 |
| Fig.2 WAO-2 自由度配置 |
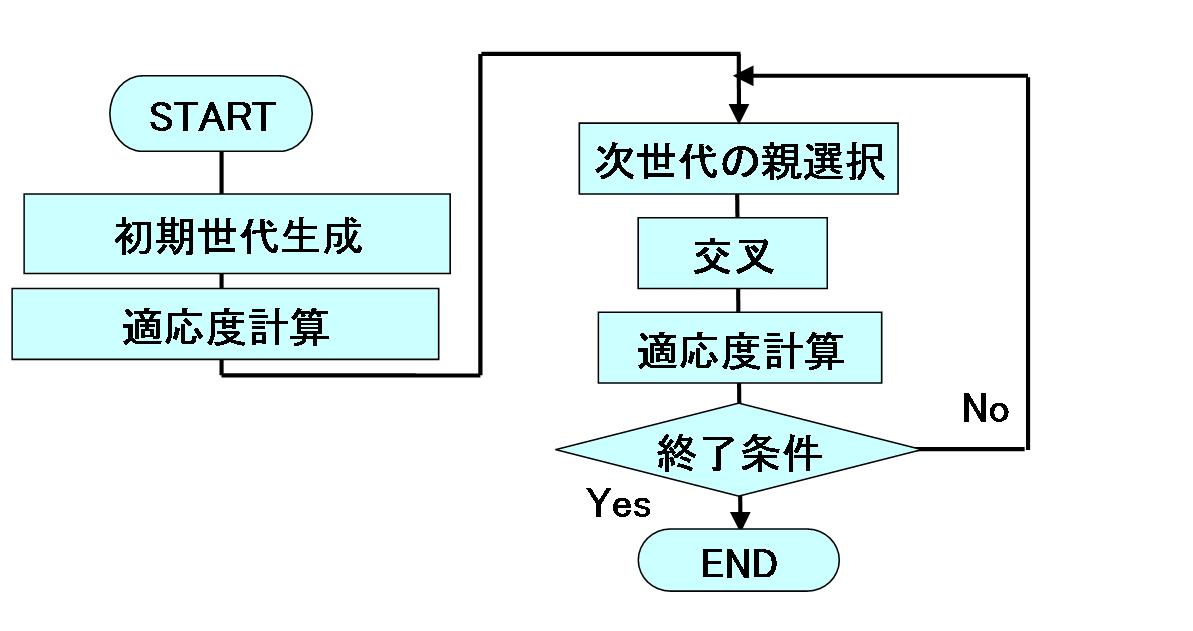 |
| Fig.3 遺伝的アルゴリズムフローチャート |
探索の結果、L1=137[mm]、L2=166[mm]に決定しました。
概観と詳細以下に完成したWAO-2の概観と詳細仕様を示します。
 |
 |
| Fig.4 WAO-2概観 | Fig.5 WAO-1R仕様 |
ロボットの制御とマッサージ軌道の生成,また,マッサージポイントの同定について の詳細はこちらをご覧下さい。
マッサージ動画| 咬筋マッサージ MPEG 11.5 MB |
側頭筋マッサージ MPEG 10.5 MB |
耳下腺マッサージ MPEG 10.2 MB |
WAO-2(患者姿勢:座位,仰臥位)とWAO-1R(患者姿勢:仰臥位)を用いて健常者7名に対して4分間咬筋のマッサージを行いました.
評価としてVAS(Visual Analog Scale)を用いて,快感,口のあけやすさ,暖かさをそれぞれ評価してもらいました.
その結果を示します.

|
| Fig.6 実験結果 |
ご覧のように,WAO-1Rのマッサージ効果と,自由度の変更,削減を行ったWAO-2のマッサージの効果には,有意な差は見られませんでした. 今後,実施回数を増やすとともに,実際の患者にマッサージを行うことで,更なる評価を行く予定です.
本研究は早稲田大学の人を対象とする研究等倫理審査委員会の許可を得て実験を行っています。
(承認番号 理06-014)
オーラル・リハビリテーション・ロボットへ 高西研究室へ