�Q�����R���[�^��
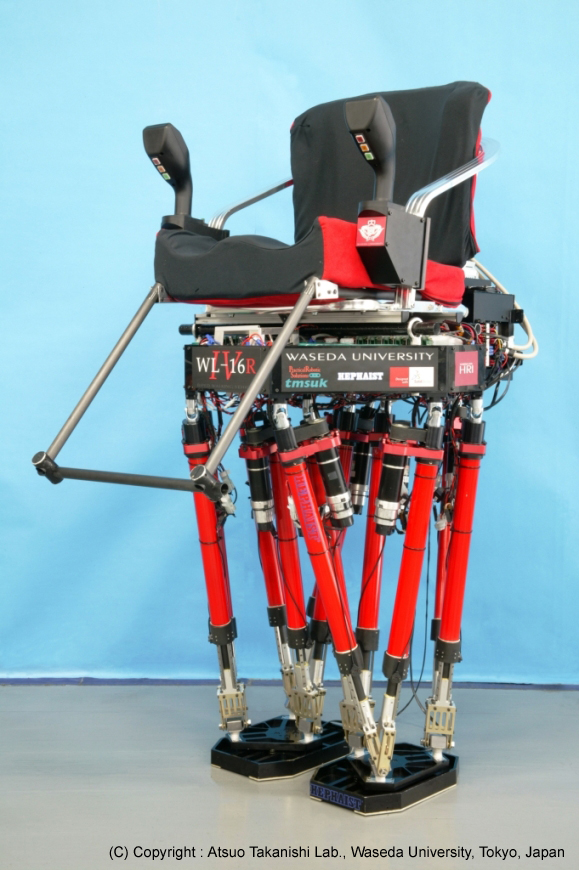
WL-16RIV
Waseda Leg-No.16 Refined IV

WL-16RIV�T�v
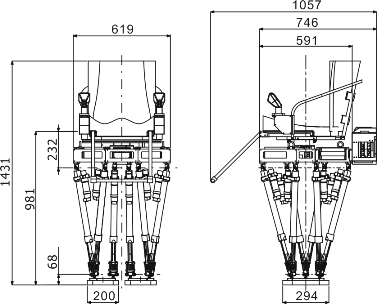
WL-16RIV�́C�r�@�\�ɃX�`�����[�g�v���b�g�z�[���^�p���������J�j�Y�����̗p���Ă���C�p���������J�j�Y���̍��o�͂����C�l�╨���悹�ĕ��s���s�����Ƃ��ł��܂��D��{�\������ѕ��s���������WL-16�Ɠ��l�ł��̂ŁC���������������������D
WL-16RIV�̎d�l�͈ȉ��̂悤�ɂȂ��Ă���܂��D
 |
 |
|
| �����@�E�d�� | |
| �S�� [mm] | 1431 |
| �d�� [kg] | 60 |
| ���d�� [kg] | 68 |
| ���@�\ | |
| �����N�`�� | �X�`�����[�g�v���b�g�t�H�[�� |
| ���R�x | �Ћr6 �~ ���r = 12 |
| ���A�N�`���G�[�^ | |
| �����@ | DC�T�[�{���[�^ |
| ��i�o�� [W] | 150 |
| ���R���s���[�^�E�d�� | |
| CPU | Pentium�V 1.2[GHz] |
| �o�b�e�� | �j�b�P�����f�o�b�e�� ���`�E���C�I���o�b�e�� |
| �Z���T�� | �@�E 6���͊o�Z���T �~ 2 �@�E 3���p���p�Z���T �~ 1 �@�E ���[�^���G���R�[�_ �~ 12 �@�E �t�H�g�}�C�N���Z���T �~ 12 |
| �����\ | |
| ���s���� [s/step] | 0.96 |
| ���� [mm/step] | 0�`300 |
| ���d�� [kg] | �@�E�ύڕ��s�@�@�@�F80 �@�E�l�ԓ�����s�F75 |
��TOP�֖߂�
�ϋv���̌���@�\�V�^�����W���C���g�̊J���\
�P�D�����ړI
2005�N�x�ɊJ�����ꂽ�l�ԓ���^�Q�����s���{�b�gWL-16RIII�͐l�Ԃ����悵�Ẳ��O���s�ɐ������Ă��Ă���C�������̌���ꂽ��ԂŎ��������Ă����Ƃ��Ɣ�ׁC��r�I�����Ԃ̕��s�����߂���悤�ɂȂ��Ă��܂����D�������C���s���Ԃ����т�ɂ�āC�����W���C���g�̃K�^�̑��储��єj���ȂǁC�ϋv���̖�肪�����Ɍ���Ă��܂����D�����ŁC�ϋv���̌���Ƃ��ĐV�^�̑����W���C���g�̊J�����s���܂����D
�Q�D�V�^�����W���C���g
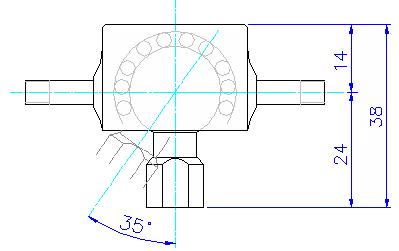
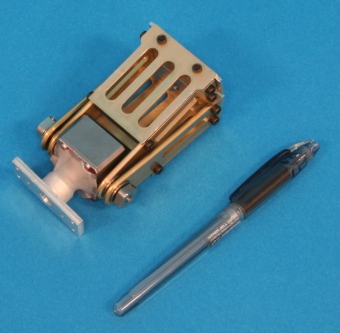
�]���̑����W���C���g�̃K�^�̌����Ƃ��āC�����ʂɎ������g�p���Ă��邱�Ƃ��l�����܂��D���s���ɂ�1800[N]�Ƃ������ɑ傫�Ȉ��k�d�������邽�߁C����ɂ���Ď������ό`���K�^���������Ă��܂��܂����D�����ŁC����V�^�̑����W���C���g�Ƃ��āC�q�[�n�C�X�g���H������Ђ̐V�^���ʓ]���莲����g�p���邱�Ƃɂ��܂����D����́C����܂Ŏs�̂���Ă������ʓ]���莲����V�����̐��������Ȃ��Ă���C�ωd���傫���Ȃ��Ă��܂��D�܂��C�]���莲��ł��邽�߁C���Ɋ��炩�ȓ������������Ă��܂��D
 |
|
Fig.1 �V�^���ʓ]���莲��@�T���} |
 |
|
Fig.2 �V�^�����W���C���g |
�R�D�]������
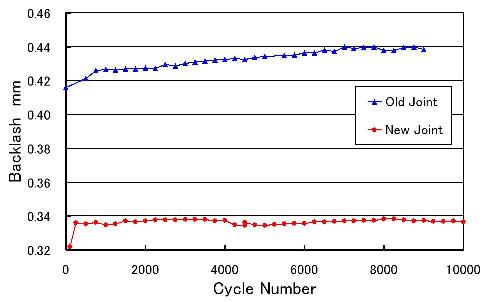
��ʓI�ɕ]�����邽�߂ɁC��J�����@��p���ĕ]���������s���܂����D������d�͕��s���ɂ������Ă���d���Q�l�ɂ��C1800[N]�̈��k�d��300[N]�̈����d�̌J��Ԃ��d�Ƃ��܂����D
�@����ɂ��C�V�^�̑����W���C���g�ł̓K�^���傫���Ȃ�Ȃ����Ƃ������邱�Ƃɐ������܂����D
 |
|
Fig.3 �K�^�̑傫���̔�r |
���d�ʂ̌���@�\�����N�z�u�̍œK���ƌy�ʉ��\
�P�D�����ړI
����܂łɊJ�����Ă���WL-16RIII�̉��d�ʂ͖�60[kg]�ł���C���c���u�t������҃V�[�g��10[kg]�ł��邱�Ƃ��l������ƁC����\�ȓ���҂̑̏d�͍ő��50[kg]�Ɣ��Ɍ����Ă��܂����D�����ŁC�ėp�ړ����W���[���Ƃ��Ď��p�ɑ���Q�����R���[�^�̊J����ڎw���C���d�ʂ̌����ړI�Ƃ��܂����D
�Q�D�����N�z�u�̍œK��
����܂ł̎����f�[�^���C���s���ɂ����Ĉꕔ�̒����A�N�`���G�[�^�ɕ��ׂ��W�����Ă��邱�Ƃ������ƂȂ���d�ʂ����ጸ���Ă������Ƃ��킩��܂����D�܂��C���̕��ׂ̏W���͑O�i�≡�ړ��Ƃ��������s�̓��e�ɂ�炸�������[�^�ɂقړ���������邱�Ƃ���C�r���̃p���������J�j�Y�����\�����郊���N�z�u�̉e�����傫���ƍl�����܂��D
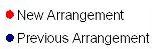
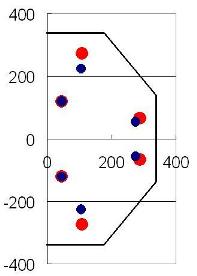
�@�{�����ł́C�܂����s���Ƀ��[�^���o�͂���g���N���V�~�����[�g�ł���t���͊w�V�~�����[�^���\�z���܂����D�����āC�V�~�����[�V�������ʂ�蓾������s�����[�^�d���̎����l�̍ő�l��]���l�Ƃ��Ď����lGA (Real-coded Genetic Algorithm) �ɂ�郊���N�z�u�̍œK���v���s���܂����D����ɂ�蓱�o���ꂽ�����N�z�u��Fig.4�̂悤�ɂȂ�܂����D
�@�����āC���̃����N�z�u���������鍜�Ղ���ё������i�̐v�삵�܂����D�V���������N�z�u�ł͍��Ղ̒�ʐς��傫���Ȃ��Ă��܂��܂������C���u�̓�������H�v���邱�Ƃɂ���Ă���܂łƓ����̎��ʂŁC����݂͏������Ƃ�����͌��ʂ������܂����D
 |
|
|
|
|
���Ց��W���C���g |
�������W���C���g |
|
Fig.4 �����N�z�u�̔�r |
|
�R�D�y�ʉ�
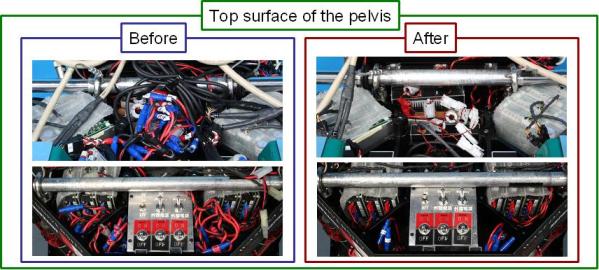
�@�����N�z�u�̕ύX�ɔ����C���{�b�g�̌y�ʉ���}��܂����D�������C���{�b�g���\�����镔�i�͂��łɌy�ʉ����l���Đv���Ă���܂��̂ŁC���܂�傫�Ȍ��ʂ͊��҂ł��܂���D�����ŁC�z�������邱�Ƃɂ���Čv�ʉ���}�邱�Ƃɂ��܂����D
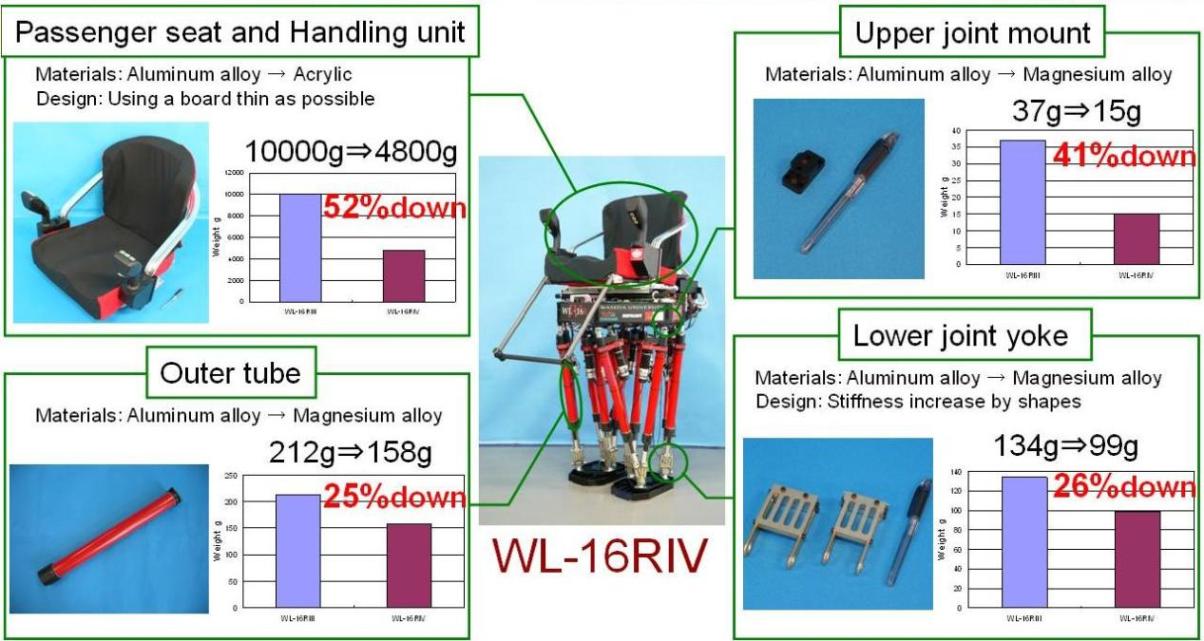
�@�܂��C�e���̓d���l���������邱�Ƃɂ��K�ȋ��e�d���̃P�[�u����I�肵�܂����D�����āC�ʏ�̃P�[�u������d���𗬂����Ƃ��ł���P�[�u�����g�p���邱�Ƃɂ����2.24[kg]�̌y�ʉ��ɐ������܂����D�܂��C�e���Ƀ}�O�l�V�E���������g�p���邱�Ƃɂ��y�ʉ���}��܂����D����ȊO�ɂ���N�x���d�����������ő�̌����ł��鑀�c���u���y�ʉ����āC������S�č��킹��ƃ��{�b�g�̎��d�͖�8[kg]�������܂����D
 |
|
Fig.5 �z���̐��� |
 |
|
Fig.6 ���{�b�g�e���̌y�ʉ� |
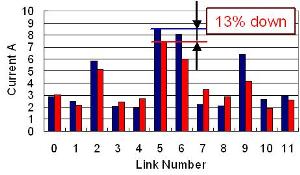
�S�D�]������
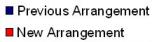
�܂��C�����N�z�u�̕ύX�݂̂̌��ʂׂ邽�߂ɁC�V���������N�z�u�̍��ՂƑ������i�̂������ĕ]���������s���܂����D���̂Ƃ��̓d�������l�̔�r��Fig.7�Ɏ����܂��D���������ƁC�d�������l�̍ő�l��15[%]���x�������Ă��邱�Ƃ�������܂��D����́C���{�b�g�V�X�e���S�̂�15[%]�C���Ȃ킿18[kg]���x���d�ʂ͑����������ƂɂȂ�܂��D
 |
|
|
|
|
������ |
�O�i |
|
Fig.7 �����N�z�u�ύX�ɂ��d�������l�̔�r |
|
�@���{�b�g�̌y�ʉ��ɂ���ĉ��d�ʂ�8kg�������C�����N�z�u�̕ύX�ɂ���ĉ��d�ʂ�18[kg]���x�������܂����D����āCWL-16RIV�̉��d�ʂ�26[kg]�����������ƂɂȂ�܂��D����ɂ��C�d��̐ύڕ��s�ł�80[kg]�܂ŁC�l�ԓ�����s�ɂ����Ă͓���҃V�[�g�̏d����������75[kg]�̐l�Ԃ܂œ���\�ƂȂ�܂����D
|
|
��TOP�֖߂�
�f�����X�g���[�V����
|
NextFest �f�����X�g���[�V���� |
��TOP�֖߂�