Multi Purpose Biped Locomotor
WL-16RIV
Waseda Leg-No.16 Refined IV

Specification of WL-16RIV
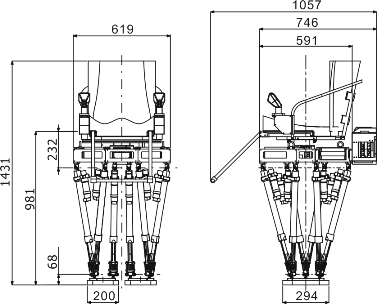
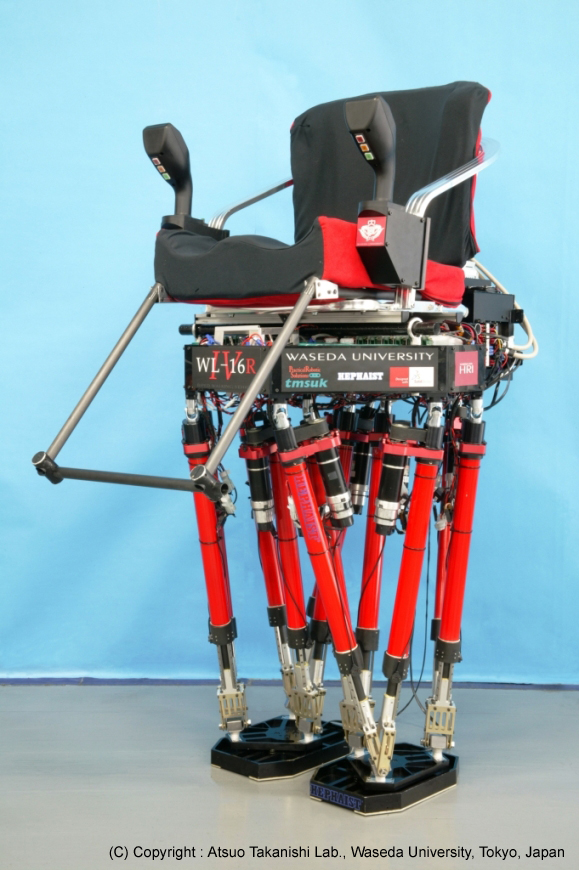
As legs of WL-16RIV, we have adopted a pair of 6-DOF parallel mechanisms. And WL-16RIV consists of two legs and a waist, and can walk independently. As for details, please refer to WL-16.
The specification of WL-16RIII is following.
 |
 |
|
| ��Size & Weight | |
| Height [mm] | 1431 |
| Weight [kg] | 60 |
| Total Weight [kg] | 68 |
| ��Mechanism | |
| Link Mechanism | Stewart Platform |
| D.O.F | 6DOF x 2Legs = 12 |
| ��Actuator | |
| Motor | DC Servo Motor x 12 |
| Rated Output [W] | 150 |
| ��Electric Equipment | |
| CPU | Pentium�V 1.2[GHz] |
| Battery | Ni-MH Battery Li-ion Battery |
| Sensors | �@ Force / Torque Sensor x 2 �@ 3 Axis Angle Detector x 1 �@ Rotary Encoders x 12 �@ Photomicrosensor x 12 |
| ��Performance | |
| Walking Cycle [s/step] | 0.96 |
| Step Length [mm/step] | 0-300 |
| Loading Capacity [kg] | �@Carrying Load�F80 �@Carrying Human�F75 |
��Go to TOP
Durability Enhancement�@-Development of the New Foot Joint-
1. Research Purpose
The human carrying biped walking robot WL-16RIII developed in 2005 succeeded in an outdoor walking, and it was demanded walking for a long time. However, the durability issue became prominent. For example the backlash of the foot joint augmented or the foot joint was broken down. Therefore the new foot joint was developed as improvement of the durability.
2. New Foot Joint
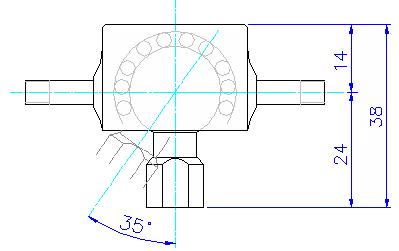
As a cause of that the backlash of the foot joint augmented, it was thought that the sliding surfaces of the old joint was made by resin. The joint was applied very large load, 1800[N], during walking. So, that caused the resin to be transformed and the backlash of the foot joint augmented. Therefore the new spherical rolling bearing made in HEPHAIST SEIKO CO.,LTD. was used as a new foot joint. This new joint improved withstanding load by a lot of planet balls.
 |
|
Fig.1 New Spherical Rolling Bearing |
 |
|
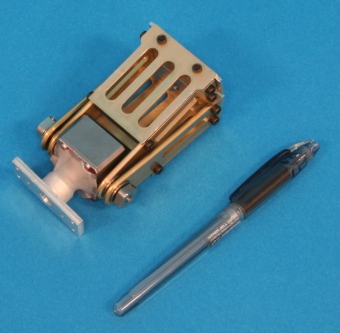
Fig.2 New Foot Joint |
3. Evaluation Experiments
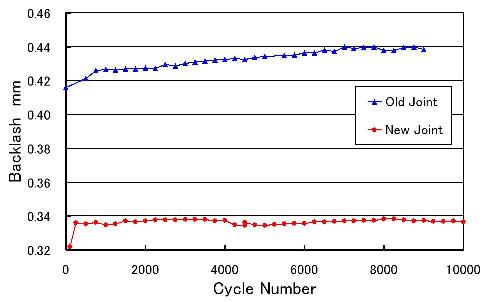
The joint was evaluated by a fatigue tester, because it had to be evaluated quantitatively. Applied load was repetition load of compression load of 1800[N] and the pulling load of 300[N]. It took load at the time of the walk into account.
Therefore, it was proved that the backlash of the new foot joint didn't increased.
 |
|
Fig.3 Comparison of Backlash |
Improvement of Weight Capacity
-Optimization of Link Arrangement and Weight Saving-
1. Research Purpose
The weight capacity of WL-16RIII developed in 2005 was 60[kg]. And only human whose weight was less than 50[kg] could ride on this robot, because the passenger seat was 10[kg]. So, it was aimed to increase the maximum payload for development of "Multi-purpose Biped Module Base".
2. Optimization of Link Arrangement
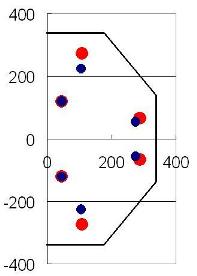
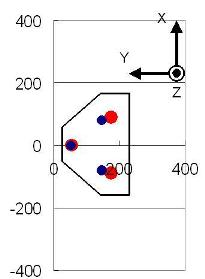
The maximum payload was very little, because the load of the linear actuator concentrates in certain links. In this research, the new pelvis and foot which realize the joint distribution that the load of each links is averaged were designed with inverse dynamic simulation and Genetic Algorism. Figure 1 shows the new link arrangement.
 |
|
|
|
|
Upper Joint |
Lower Joint |
|
Fig.4 Optimization of Link Arrangement |
|
3. Weight Saving
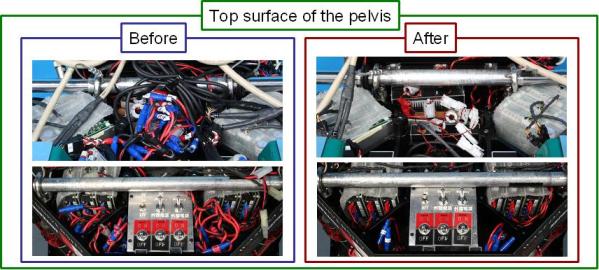
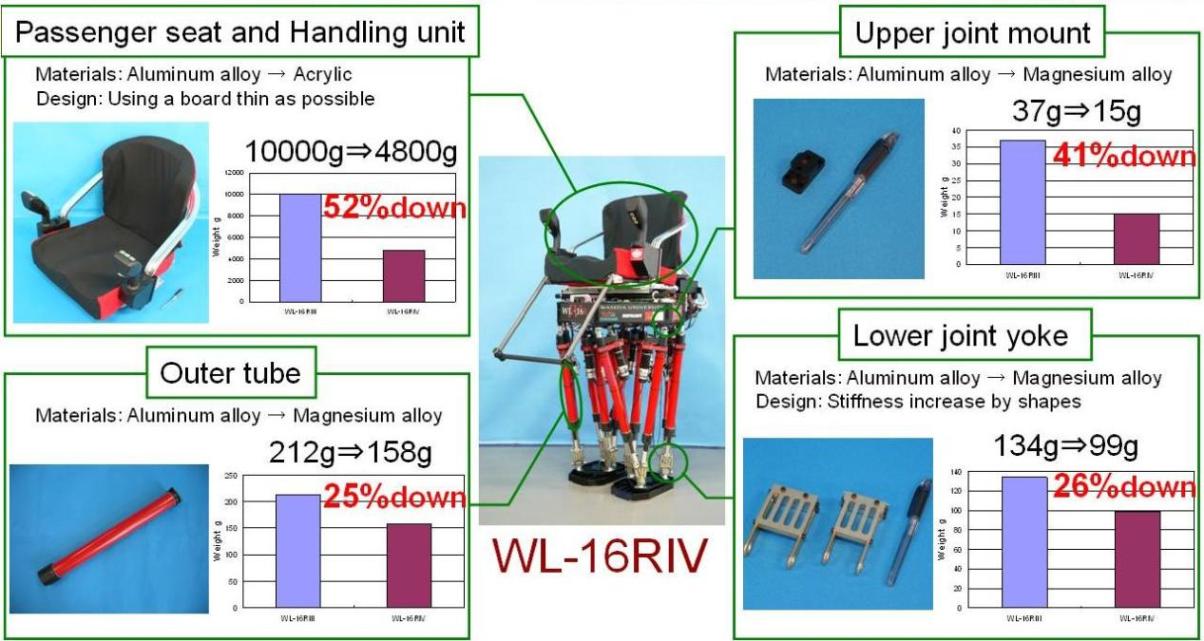
The weight of WL-16RIII was trimmed weight by cable arrangement. This succeeded the weight saving of about 2.2[kg]. Furthermore, the weight was trimmed by changing materials of some robot parts and changing new passenger seat. All told, this succeeded the weight saving of about 8[kg].
 |
|
Fig.5 Arrangement of Cable |
 |
|
Fig.6 Weight Saving of Some Parts |
4. Evaluation Experiments
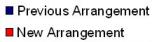
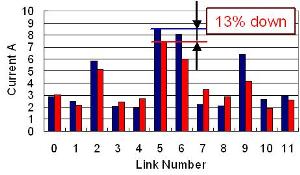
Figure 7 shows the comparison of the RMS value of stamping carrying 50[kg] human, and walking with the step length of 0.2[m]. As a result, the maximum RMS value among all the links has been reduced for about 15[%]. This means the maximum payload of WL-16RIV should be increased.
 |
|
|
|
|
Stamping |
Walking forward |
|
Fig.7 Comparison of RMS value |
|
Considering that the maximum RMS value among all links has been reduced for about 15[%], the total weight as one walking system can be increased by 18[kg]. Moreover, considering that the weight of the passenger seat and the handling unit has been trimmed for 8[kg], the maximum payload of WL-16RIV should be increased by 26[kg] more than that of W-16RIII. Therefore, WL-16RIV can carry 80[kg] load, or 75[kg] human.
|
|
��Go to TOP
Demonstration
| < |
NextFest Demonstration |
��Go to TOP