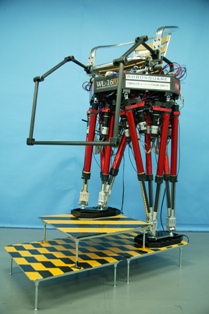
Multi Purpose Biped Locomotor
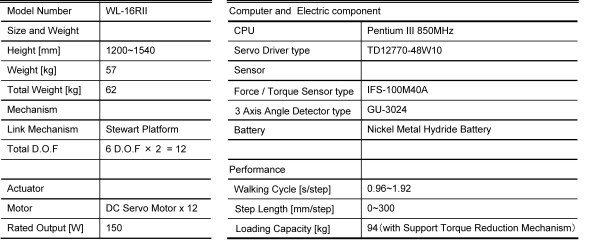
WL-16RII
( Waseda Leg No. 16Refined II )
・Walking Up and Down Stairs, Carrying a Human
![]()
・Calibration Method for Stewart Platform Leg Mechanism ![]()
・Landing Pattern Modification Method ![]()
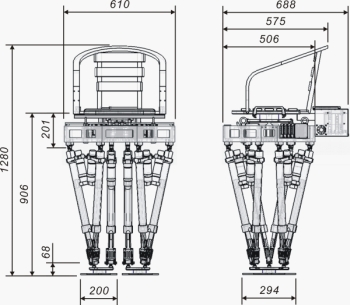
・WL-16RII Specification ![]()
・Members ![]()
1. Research Purpose
If a walk motion pattern on stairs is created by our pattern geneator already
proposed, it is difficulut for the feet to reach the stairs because the
stroke of its linear actuators is not enough. Our purpose in this research
is the realization of walking up and down stably various stairs of human
living enviroments, carrying a human.
2. Walking Control
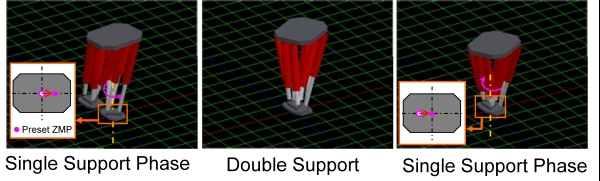
To deal with the problem, a yaw waist motion and preset ZMP trajectories
are changed, and a walk motion pattern is generated.
3. Improvement on the hardware
We improved the 3-DOF Passive joint to achieve the larege movavle range
of rotation around Z axis.The Specification about WL-16RII is here.

4.Evaluation experiments
(a) Going up and down stairs
Walking cycle:5.76 [s/step]
Step height:250 [mm] ,Pedal tread 500[mm]
(b) Going up and down stairs, carrying a human
Passenger's weight: 60[kg]
Walking cycle:5.76 [s/step]
Step height :200 [mm] , Pedal tread: 500[mm]
(c) Going up and down stairs, carryng a human
Passenger's weight: 60[kg]
Walking cycle: 5.76 [s/step]
Step height: 150 [mm] , Pedal tread:300~500[mm]
(d) Going up stairs in the real environment,
carrying a human
Passenger's weight: 60[kg]
Walking cycle: 5.76 [s/step]
Step height:138.5~147.5 [mm],Pedal tread:400 [mm]
(e) Going up outdoor stairs
Walking cycle: 5.76 [s/step]
Step height:128.9~143.2 [mm]
Pedal tread:250~300 [mm]
1.Research Purpose
Our purpose in this research is devising a new calibration method for Stewart
Platform Leg Mechanism to improve the reproducibility of experimental system.
2. Calibration Method
We developed two systems which enable us to understand the relation between
the position and the orientaion of the waist and feet by watching.For position
calibration, we used the position calibration system with two fiber sensors
on the tip,and for orientation calibration, we used a digital angle meter.
.jpg)
.jpg)
.jpg)
(a) Position calibration system
(b) Biped model attached position calibration system
(c) Position calibration method
.jpg)
.JPG)
_roll.jpg)
(d) Digital angle meter
(e) Orientation Calibration_Roll
(f) Orientation Calibration_Pitch
※If these images are clicked, they will be enlarged.
3. Evaluation Experiment
Through walking experiments, we identified that the absolute position accuracy of feet was improved, and the reproducibility
was improved.
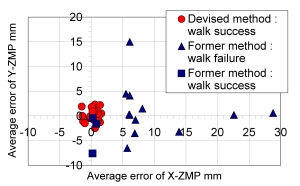
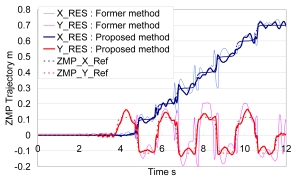
fig.1 Average error of ZMP
fig2. ZMP Trajectries
(0.96s/step, 0.10m/step)
1.Research Purpose
Our purpose in this research is the development of walking stbilization
control method for unknown uneven surface in the real environment.
2.Walking Control
On our proposed method, nonlinear compliance control is applied to the
foot motion, and comparing the theoritical and actual displacement, the
shape of landing terrain is detected before landing impact force occurs,
and from this, landing pattern of the foot is modified and the foot follows
the terrain. Proposed method doesn't need any special sensors including
gyroscopes, except the force sensors, and is also adoptable to concave
or slope.
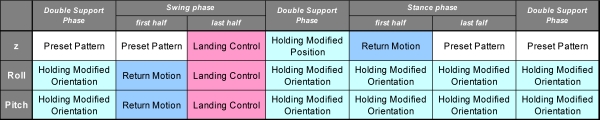
Time chart of landing pattern modification method
.jpg)
Block diagram of landing pattern modification method (Enlarged display)
3. Evaluation Experiment
(a) Walking experiment on uneven surface
Unevenness: 0~20[mm]
Landing pitch and roll angle:0~5 [deg]
Walking cycle:1.92 [sec/step]
Step Length: 200 [mm/step]
(b) Walking experiment in the real environment
Walking on Hakata Kotobuki-bashi bridge.
(It's public road!)
Walking cycle: 1.92 [sec/step]
Step Length: 200 [mm/step]
(c) Expriment Going up a stair with unknown rise
Preset height: 150[mm] , Actual height: 130[mm]
Walking cycle: 5.76 [s/step]
Pedal tread: 500 [mm]
(d) Experiment going up a stair with unknown rise
Preset height: 150[mm] , Actual height: 170[mm]
Walking cycle: 5.76 [s/step]
Pedal tread: 500 [mm]

Project Leader:Prof.Takanishi
Doctor course:Yusuke Sugahaha
Master course:Masamiki Kawase, Kenji Hashimoto, Akihiro Ohta, Chiaki Tanaka
Undeargraduate:Nobutuna Endou, Terumasa Sawato, Akihiro Hayashi