|
WL-16R (Waseda-Leg No.16 Refined) |
 |
| Mechanism |
As legs of WL-16R, we have adopted a pair of 6-DOF parallel mechanisms. And WL-16R consists of two legs and a waist, and can walk independently.
As for details, please refer to WL-16.
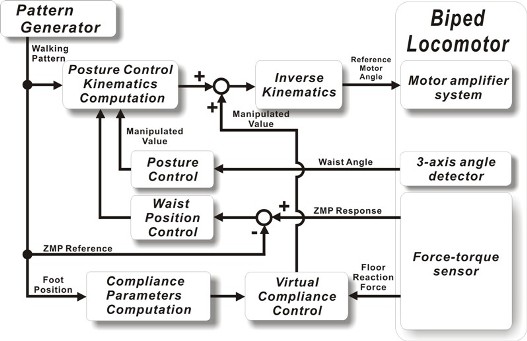
| Control System |
WL-16R is controlled by a PC which is mounted on its trunk, without any external support except for the power supply. Each actuator system is equipped with an incremental encoder attached to the motor shaft, and a photo micro sensor attached to each link in order to detect the initial posture. Also each foot is equipped with a six-axis force/torque sensor which is used for measuring the floor reaction force and ZMP.
As a real time operating system, QNX Realtime Platform was selected.
We have developed a means of walking stabilization control. The method consists of a virtual compliance control, parameter variant method and posture control. These control methods allowed footfall and walking on an unknown inclined road to be realized.
| Specifications |
The specifications of WL-16R are shown as follows.
 |
||
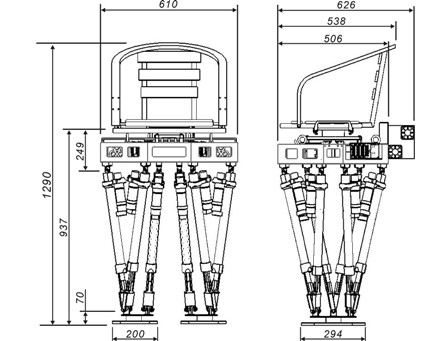
| Outline | ||
|
 |
 |
| (a) front | (b) right | |
 |
 |
|
| (c) rear | (d) left |
If a photograph is clicked, another window will open.
| Size & Weight | |
| Height [mm] | 1160-1500 |
| Weight [kg] | Battery onboard: 55 |
| Without battery: 62 | |
| Mechanism | |
| Link Mechanism | Stewart Platform |
| D.O.F | 6DOF x 2 = 12 |
| Actuator | |
| Motor | DC Servo Motor x 12 |
| Rated Output [W] | 150 |
| Electric Equipment | |
| CPU | Pentium�V 1 GHz |
| Battery | Nickel Metal Hydride Battery |
| Sensors | �@Force / Torque Sensor x 2 �@3 Axis Angle Detector x 1 �@Rotary Encoders x 12 �@Photomicrosensor x 12 |
| Other Equipments | Electromagnetic Brake x 12 �@Wireless LAN Module |
| Performance | |
| Walking Cycle [s/step] | 0.96-1.92 |
| Step Length [mm/step] | 0-300 |
| Loading Capacity [kg] | Normal: 0-60 Using STRM: 0-94 |
| Battery Life [min] | Normal: 67 Using STRM: 81 |
| Support Torque Reduction Mechanism: STRM |
In November 2003, using WL-16, the world-first dynamic biped walking carrying an adult woman and a dynamic biped walking carrying a 60kg adult man were realized. However, for application as a mobile base, its payload of 60kg and battery life of 67minutes are insufficient. That's why this study aims to reduce the power consumption during walking and increase the payload.
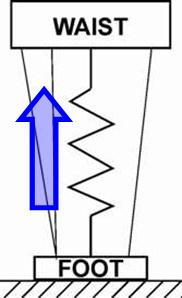
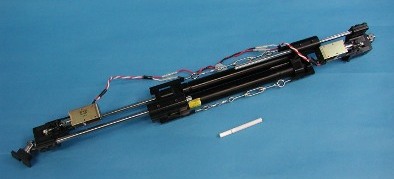
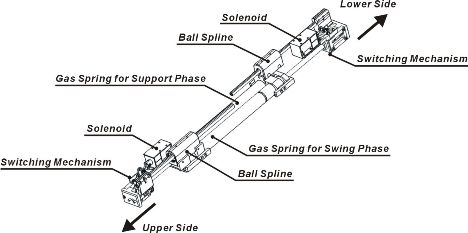
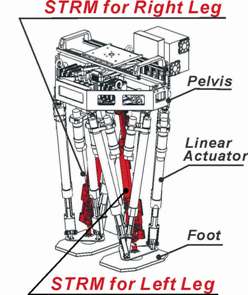
We developed the Support Torque Reduction Mechanism (:STRM).
| The Support Torque Reduction Mechanism consists of two compression gas springs with different spring forces that hava a lock function, and are attached to each leg. This mechanism locks and unlocks each spring according to the support / swing phase, and supports mainly vertical force. |  |
 |
The specifications of STRM are shown as follows.
 |
|||||||||||||||||||||
 |
|||||||||||||||||||||
|
|||||||||||||||||||||
Appearances of WL-16R with STRM are shown as follows.
 |
 |
||
 |
 |
 |
 |
| (a) front | (b) right | (c) left | (d) rear |
If a photograph is clicked, another window will open.
| Experiments |
|
|
|
| (a) Walking on Uneven Surface Footfall experiment on uneven surface with the level difference of 12mm. ��Walking Cycle:0.96[s/step] |
|
|
|
|
| (b) Walking Against External Force Footfall experiment against external force of 10kgf ��Walking Cycle:0.96[s/step] |
|
|
|
|
| (c) Walking on Inclined Plane Footfall experiment on an inclined plane of 8 degrees ��Walking Cycle:0.96[s/step] |
|
|
|
|
| (d) Crimbing Up Inclined Plane The forward walking conducted from a level road one inclined by 3 degrees was conducted. ��Walking Cycle:0.96[s/step], Step Length:100[mm/step] |
|
|
|
|
| (e) With 80kg Load Using STRM Dynamic walking carrying an 80kg payload was achieved. ��Walking Cycle:0.96[s/step], Step Length:100[mm/step] |
|
|
|
|
| (f) Carrying Human Using STRM Dynamic walking carrying a 94kg man was achieved. ��Walking Cycle:0.96[s/step], Step Length:100[mm/step] |
|
|
|
|
| Future Works |
 |
Now that we have developed the basic walking stabilization control for an uneven surface using WL-16, our next goal is to realize walking in the human-living environment. We will also continue to study more intelligent walking control methods for more complex unknown environments. |