2足ロコモータ班
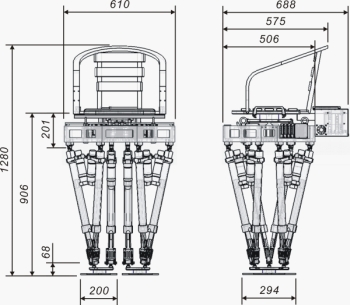
WL-16RII
( Waseda Leg No. 16 Refined II )
・人間搭乗階段昇降の実現 ![]()
・スチュワートプラットフォーム型脚機構の校正手法の開発
![]()
・非線形コンプライアンス制御を用いた着地軌道修正法
![]()
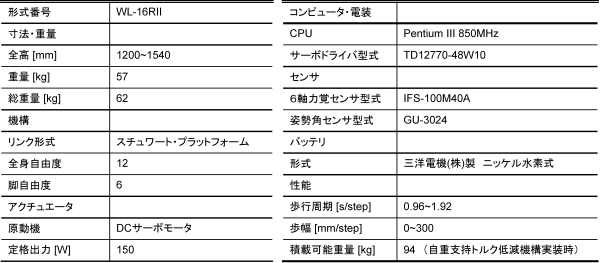
・WL-16RII 仕様 ![]()
・研究メンバー ![]()
1. 研究目的
改良機WL-16Rの歩行可能な段差の高さは135mmが限界でした.これ以上は高い階段を昇ろうとすると直動リンクの可動範囲を超えてしまうためです.これでは実用に足る汎用2足ロコモータとは呼べません.本研究では,人間が乗った状態でも,実際に存在する階段が昇降できることを目的としました.
2. 歩行制御
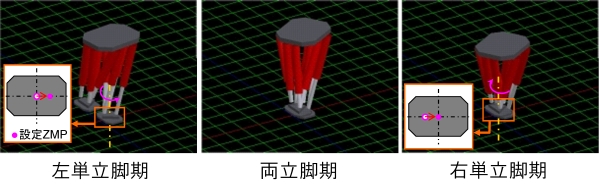
我々は階段の昇り方,降り方を工夫することで,階段昇降に必要な可動範囲が小さくできることを,シミュレーションにより確認しました.具体的には,遊脚を前方に振り出すと同時に単脚支持側の腰部をYaw軸回りに捻る工夫,単脚支持期における設定ZMPを内側前後方向に移動させる工夫です.歩行パターン作成時に,Yaw軸回りの旋回角と設定ZMPの移動量,2つのパラメータを調整します.
3. ハードウェアの改良
階段歩行パターンには,従来より広範囲にYaw軸旋回角を使用するため,3軸受動ジョイントの改良を行いました.また人間搭乗階段昇降に備え,足部品もより剛性の高いものに改良しました.改良機
WL-16RII の仕様についてはこちらをご覧下さい.

4. 評価実験
WL-16RIIと新歩行パターン評価のため,以下の評価実験を行いました.人間の住環境に存在する階段歩行にも成功しております.
(a) 蹴上げ高さ 250[mm] の階段昇降
歩行周期:5.76[s/step]
踏み代:300[mm]
(b) 蹴上げ高さ 200[mm] の階段昇降
歩行周期:5.76[s/step]
踏み代:300[mm] , 搭乗者体重:60[kg]
(c) 蹴上げ高さ 150[mm] の連続階段昇降
歩行周期:5.76[s/step]
踏み代:300[mm] , 搭乗者体重:60[kg]
(d) ショッピングモール内階段歩行
歩行周期:5.76[s/step] , 搭乗者体重:60[kg]
蹴上高さ:138.5〜147.5[mm] , 踏み代:300[mm]
(e) 屋外階段歩行
歩行周期:5.76[s/step] ,
蹴上高さ:128.9〜143.2[mm] , 踏み代:300[mm]
1. 研究目的
本研究では,Stewart Platform型脚機構の校正手法を考案し,ロボットの実験装置としての再現性を高めることを目的としました.
2. 校正手法
我々は,目標に対して足部がどのような位置・姿勢をとっているのか,目視にて把握できる校正器具を製作し,それを実装して足部の位置・姿勢の修正を行うことにしました.位置の校正には,反射型ファイバセンサを用いた校正器具を,姿勢の校正にはデジタル角度計を用いました.
.jpg)
(a) 位置校正器具
.jpg)
(c) 位置校正手順
.jpg)
(b) 位置校正器具装着図
.JPG)
(d) デジタル角度計
.jpg)
(e) 姿勢角校正:roll
_roll.jpg)
(f) 姿勢角校正:pitch
※図をクリックすると拡大して表示されます.
3. 評価実験
歩行実験における両立脚静止時のX,Yの実測ZMP軌道の目標軌道からの偏差を測定し,本手法の校正作業としての再現性の評価に用いました.図1,図2の結果から,再現性の向上を実現いたしました.
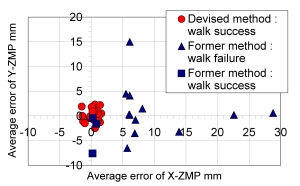
図1.ZMP偏差の分布
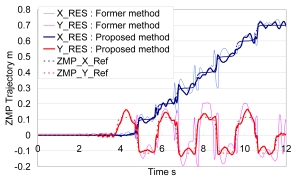
図2.前進歩行実験ZMP軌道
(0.96s/step, 0.10m/step)
1. 研究目的
本研究では,歩行安定化制御を開発し実環境不整地を含めた未知の不整路面での歩行実現を目的としております.
2.歩行制御
WL-16RIIは「着地軌道修正法」という歩行安定化制御を搭載しております.本手法は,足部に非線形コンプライアンス制御を適用し,歩行パターンから得られる理論コンプライアンス変位と実測コンプライアンス変位を比較することにより,大きな着地衝撃が生じる以前に路面の形状を検知し,この路面情報を元に遊脚の荷重が増大してくる以前に歩行パターンにおける着地軌道を変更し路面に倣わせることで,未知の凹凸路面や傾斜路面における歩行を可能とするものです.なお非線形コンプライアンス制御はZ方向にのみ適用し,Roll,Pitch軸には通常のコンプライアンス制御を適用しております.
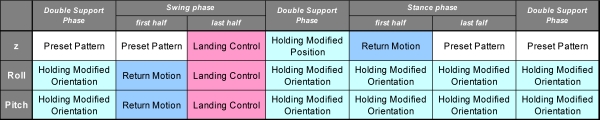
着地軌道修正法タイムチャート
.jpg)
着地軌道修正法ブロック線図(拡大表示)
3. 歩行実験
評価実験として,実験室内の擬似不整地歩行実験,またロボット特区内の実環境不整地歩行実験を行いました.
(a) 擬似不整地歩行実験
厚さ20[mm]までのアクリル板を無作為に
並べた擬似不整地にて,前進歩行する映像です.
歩行周期:1.92 [sec/step]
歩幅:200 [mm]
(b) 実環境不整地歩行実験
ロボット特区内の凹凸と傾斜が混在する
路面において,前進歩行する映像です.
歩行周期:1.92 [sec/step]
歩幅:200 [mm]
(c) 階段歩行実験1
蹴上高さ150[mm]の歩行パターンを使用して,
蹴上高さ130[mm]の階段を昇る映像です.
歩行周期:1.92 [sec/step]
歩幅:200 [mm]
(d) 階段歩行実験2
蹴上高さ150[mm]の歩行パターンを使用して,
蹴上高さ170[mm]の階段を昇る映像です.
歩行周期:1.92 [sec/step]
歩幅:200 [mm]

2005年度は,指導教員高西淳夫教授を含め9名のメンバーで研究を進めております.
指導教員:高西淳夫
博士課程:菅原雄介
修士課程:川瀬正幹,橋本健二,太田章博,田中智明
学部生:遠藤信綱,沢戸瑛昌,林昭宏