|
WL-16R (Waseda-Leg No.16 Refined) |
 |
| �� �r���@�\ |
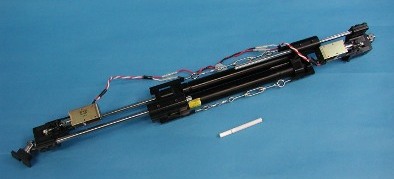
WL-16R�̋r���ɂ́C�X�`�����[�g�E�v���b�g�t�H�[���ƌĂ��6���R�x�p���������J�j�Y�����̗p���Ă��܂��D WL-16R�̊�{�\���́CWL-16����\������Ă��܂��̂������������Q�Ƃ��������D
| �� ���s���� |
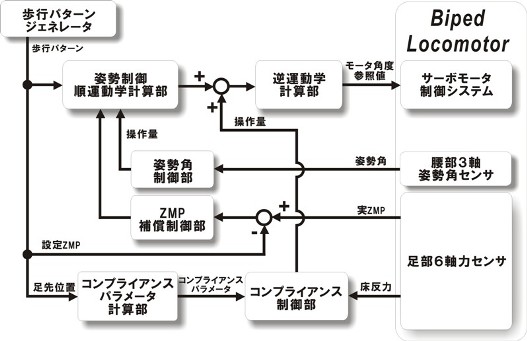
WL-16R�̕��s����ɂ́C��������1987�Ɋ�{���_�\���C����܂Ō����W�����Ă����C �uZMP���蔻�ʋK�͂Ɋ�Â����[�����g�⏞�O���Z�o�A���S���Y���v�Ƃ��� �Q�����s���������p���Ă��܂��D
�iZMP�ɂ��Ă������������Q�Ƃ��������D�j
���s�p�^�[���쐬���ɂ́C���{�b�g�ɏ���Ă���l�̏d�S�ʒu�⊵�����[�����g�Ȃǂ� �͊w�I�p�����[�^���K�v�ł��D�������l�Ԃ̗͊w�I�p�����[�^�̑���͔��ɓ���C �܂��l�Ԃ����{�b�g�̏�ŏ����ł������ƕς���Ă��܂����߁C ���O�ɂ��̃p�����[�^��͍̂���ł��D �����ŁCWL-16R�ł͏���Ă���l�����������Ă��C�܂��H�ʂ̌X��ʉ���������Ȃ��Ă����肵�����s���p ���ł���悤�Ȑ��䂪�K�v���ƍl���܂��āC���̂悤�Ȉ��艻������������Ă��܂��D�P�ڂɉ��z�R���v���C �A���X����Ƃ�������@��p���C�����ɂ��炩�����������邱�Ƃɂ���āC�ύڕ��̗͊w���f���덷�� �H �ʂ̉��ʂȂǂ������������ꍇ�ɂ����肵�����s���������܂��D�Q�ڂ�ZMP�⏞����Ƃ�������@��p���C�O���̂��߂ɐ�����ZMP�̕ω���⏞���邱�Ƃɂ���āC ���{�b�g�ɕs�ӂ̊O�͂���������ꍇ�ɂ����肵�����s���������܂��D�R�ڂɎp�������p���C���{�b�g�����̈ʒu�Ǝp���p��⏞ ���邱�ƂŖ��m�̌X�Ζʂɂ����Ă��p���I�ȑ����݉^����O�����ւ̕��s���������܂��D
| �� �d�l |
WL-16R�̎d�l�͈ȉ��̕\�Ɏ����ʂ�ł��D
 |
||
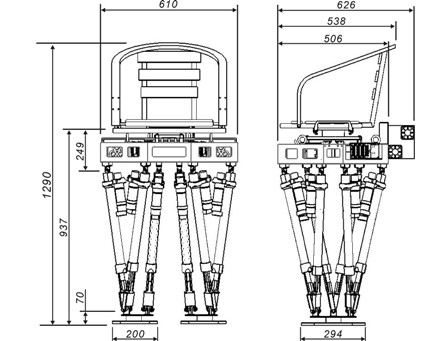
| �O�`���@ | ||
|
 |
 |
| (a)���� | (b)�E���� | |
 |
 |
|
| (c)�w�� | (d)������ |
���ʐ^���N���b�N����ƕʃE�B���h�E���J���܂�
| �����@�E�d�� | |
| �S�� [mm] | 1160�`1500 |
| �d�� [kg] | 55 |
| ���d�� [kg] | 62 |
| ���@�\ | |
| �����N�`�� | �X�`�����[�g�v���b�g�t�H�[�� |
| ���R�x | �Ћr6 �~ ���r = 12 |
| ���A�N�`���G�[�^ | |
| �����@ | DC�T�[�{���[�^ |
| ��i�o�� [W] | 150 |
| ���R���s���[�^�E�d�� | |
| CPU | Pentium�V 1GHz |
| �o�b�e�� | �j�b�P�����f�d�r |
| �Z���T�� | �@�E 6���͊o�Z���T �~ 2 �@�E 3���p���p�Z���T �~ 1 �@�E ���[�^���G���R�[�_ �~ 12 �@�E �t�H�g�}�C�N���Z���T �~ 12 |
| �����\ | |
| ���s���� [s/step] | 0.96�`1.92 |
| ���� [mm/step] | 0�`300 |
| �ύډ\�d�� [kg] | 0�`60 ���d�x���g���N�ጸ�@�\�������F0�`94 |
| �쓮���� [min] | 67 ���d�x���g���N�ጸ�@�\�������F81 |
������������WL-16R�̒lj��d�l�ƂȂ�C����ȊO��WL-16�Ɠ��d�l�ł��D
�Ȃ��CWL-16�̎d�l������������D
�Ȃ��CWL-16�̎d�l������������D
| �� ���d�x���g���N�ጸ�@�\ |
WL-16�̐��ʂ��60kg�̐l�Ԃ𓋏悳�����ꍇ�̂Q�������s�ɂ͐����������܂����D �������Ȃ���60kg����l�Ԃ͑����C�����100kg���郍�{�b�g�����Ȃ�����܂���̂ŏ\���Ȑύڔ\�͂Ƃ͌����܂���D �܂��Œ��쓮���Ԃ�67���ł���C��������\���ł͂���܂���D
�����Ŏ������͉��d�ʂ̑����Ə���d�͂̒ጸ���߂����CWL-16R�̃A�^�b�`�����g�Ƃ��āu���d�x���g���N�ጸ�@�\�v���l�Ă��܂����D
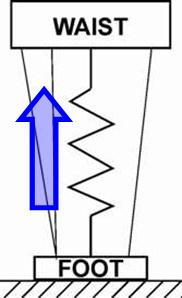
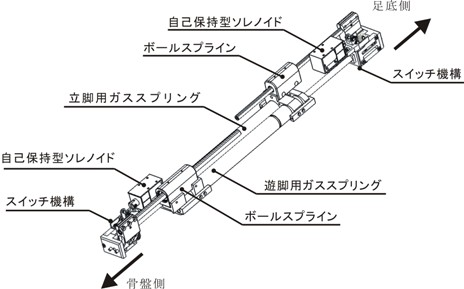
| �u���d�x���g���N�ጸ�@�\�v�Ƃ́C�o�l�v�f�𗘗p���C���{�b�g�̎��d�̉���������⏕�I�Ɏx�����邱�ƂŁC�A�N�`���G�[�^ �ɂ�����g���N��ጸ�����邱�Ƃ�ړI�Ƃ��Ă��܂��D����ɔz�u���ꂽ�Q�{�̃��b�N�@�\�t�K�X�X�v�����O�ō\������Ă���C���s�̗��r�E�V �r�ɑΉ����ăo�l�̌��ʂ�ؑւ���@�\�������Ă��܂��D�����Łu���r�E�V�r�ɑΉ�����v�Ƃ́C���r���ɂ̓o�l�����d���x������������ʂ����C �V�r���ɂ̓o�l�̉e�������ɃA�N�`���G�[�^�ɕ��S�̂Ȃ��������삪�����ł���C �Ƃ������Ƃ��Ӗ����Ă��܂��D |  |
 |
���d�x���g���N�ጸ�@�\�̎d�l�͈ȉ��Ɏ����ʂ�ł��D
 |
|||||||||||||||||||||
 |
|||||||||||||||||||||
|
|||||||||||||||||||||
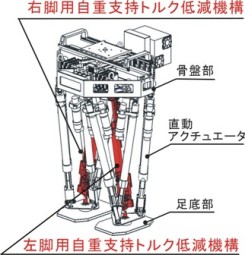
���d�x���g���N�ጸ�@�\����������WL-16R�͂�����̂悤�ɂȂ�܂��D
 |
 |
||
 |
 |
 |
 |
| (a) ���� | (b) �E���� | (c) ������ | (d) �w�� |
���ʐ^���N���b�N����ƕʃE�B���h�E���J���܂�
| �� ���s�����f�� |
WL-16�͂���܂łɁC�ȉ��̂悤�ȕ��s�ɐ������Ă��܂��D
|
|
|
| (a) ���ʘH�ʂł̑����ݓ��� ����12[mm]�̔�Б��̉��ɔz�u�����s���H�ʂł̕��s�����̉f���ł��D �� ���s�����F0.96[s/step] |
|
|
|
|
| (b) �O�͂�t�������ꍇ�ł̑����ݓ��� 10[kgf]�̗͂őO�����Ƀ��{�b�g�����������ꍇ�ł̕��s�����̉f���ł��D �� ���s�����F0.96[s/step] |
|
|
|
|
| (c) �X�Ζʂł̑����ݓ��� 8[deg]�̊p�x�����X�Ζʂł̕��s�����̉f���ł��D �� ���s�����F0.96[s/step] |
|
|
|
|
| (d) ���R�H����X�Ζʂւ̕��s���� ���R�ʂ���3[deg]�̊p�x�����X�Ζʂւ̕��s�̉f���ł��D �� ���s�����F0.96[s/step]�C����100[mm/step] |
|
|
|
|
| (e) 80kg�ύڕ��s ���d�x���g���N�ጸ�@�\�����t���邱�Ƃɂ��C80kg�̂�������悹����Ԃł̕��s�ɐ������܂����D �� ���s�����F0.96[s/step]�C����100�F[mm/step] |
|
|
|
|
| (f) ���l�j�����悹�Ă̂Q�������s ���d�x���g���N�ጸ�@�\�����t���邱�Ƃɂ��C94kg�̐��l�j�����悹�Ă̂Q�������s�ɐ������܂����D �� ���s�����F0.96[s/step]�C����100�F[mm/step] |
|
|
|
|
| �� ����̓W�] |
 ����́C��葬�����x�ł̕��s�C�K�i�̏��~�C�s���n���s����C
���悷��l�Ԃ̗͊w���f����^���̉e�����t�B�[�h�o�b�N����C���e���W�F���g�Ȑύڕ��s����@�̍\�z�Ȃǂ��܂߁C
����Ɏ��p�ɑ���ėp�Q���ړ����W���[���̊J����i�߂Ă䂫�܂��D
����́C��葬�����x�ł̕��s�C�K�i�̏��~�C�s���n���s����C
���悷��l�Ԃ̗͊w���f����^���̉e�����t�B�[�h�o�b�N����C���e���W�F���g�Ȑύڕ��s����@�̍\�z�Ȃǂ��܂߁C
����Ɏ��p�ɑ���ėp�Q���ړ����W���[���̊J����i�߂Ă䂫�܂��D�^�Ɏ��p�I�ȂQ�����s���{�b�g�̊J����ڎw���������̗��́C�܂��I���܂���D