(Waseda-Shoes No.2) |
|
|
| ■ 研究目的 |
2足歩行の長所としては,凹凸や段差のある路面に適応しやすいという点が挙げられますが, 一方で車輪式移動機構に比べて平坦路面における移動効率が悪いという短所があります. そこで本研究では,階段などの障害物を乗り越える能力が高い2足歩行ロボットに, 平地を高速かつ高効率で移動する能力を付加できる車輪式足部モジュールを開発することを目的としています.
| ■ 仕様 |
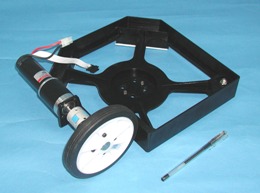
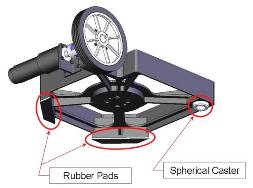
車輪式足部機構WS-2の構成としては4点の接地点のうち内側2点が通常の摩擦接地,外側前方が DCモータ駆動の能動車輪,そして外側後方は平面内で拘束を持たない3自由度の球状キャスタになっています.
仕様に関しては以下の表に示す通りです.
 |
 |
|
| (a) Photograph | (b) Assembly Drawing | |
| ▽車輪式足部機構WS-2の仕様 | |
| 寸法 | 259×349×60 mm |
| 重量 | 2.5 kg |
| タイヤ径 | 130 mm |
| モータ | 90W (公称電圧 42V) |
| 最高速度 | 6.0 km/h |
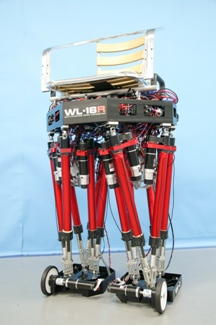
WS-2は一般的な2足歩行ロボット全てに適用される汎用的なものですが,今回は機構評価のプラットフォームとして 汎用2足ロコモータWL-16R(Waseda-Leg No.16 Refined)を用いて評価実験を行いました.
実際にロボットに装着した様子は以下のようになります.
 |
 |
 |
| (a)正面 | (b)右側面 | |
 |
 |
|
| (c)背面 | (d)左側面 | |
| WL-16R/WS-2 | ||
※写真クリックすると別ウィンドウが開きます
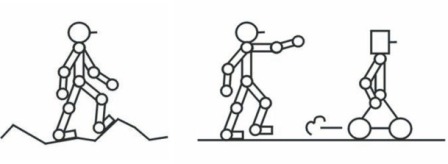
| ■ 歩行と車輪走行の切り換え方法 |
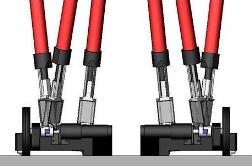
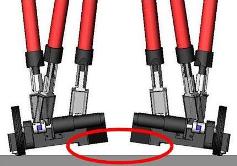
車輪走行時には,車輪の接地点とキャスタの接地点を結んだ直線の周りに両足を外側に傾け 能動車輪とキャスタだけが接地するようにすると,平坦路面を2輪駆動で移動することができます.
 |
 |
|
| (a) 2足歩行時 | (b) 車輪走行時 | |
| ■ 制御方式 |
当研究室では1966年よりこれまで2足歩行ロボットに関して多くの研究を行ってきています.
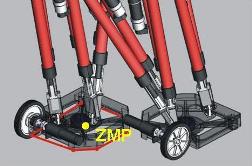
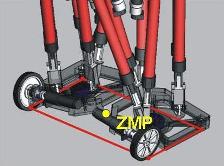
WS-2を2足歩行ロボットに装着した場合の歩行も,これまでに研究されてきた2足歩行の場合と同様に, 足底の4つの接地点によって形成される支持多角形内の中心付近に目標ZMPが収まるように目標ZMP軌道を 設定し,これより腰軌道を算出することで歩行が可能です.
車輪走行時においても,車輪とキャスタによって安定領域を確保しながら移動するので,これまでに蓄積されてきた 2足歩行に関する技術を応用することで安定した車輪走行が可能になります.
手順としては,まずロボットの移動経路を決定し,ロボットの位置と方向が指定されればZMPが常に支持多角形内 の中心付近に収まるような目標ZMP軌道を設定することができます. そして,得られた目標ZMP軌道を満たすように,当研究室で考案された「ZMP安定判別規範に基づくモーメント 補償軌道算出アルゴリズム」を適用すればロボットが転倒することなく安定して車輪移動できるような腰軌道が 算出されます.
 |
 |
|
| (a) 2足歩行時 | (b) 車輪走行時 | |
| ■ 実験映像 |
WS-2を用いることによって,以下のような車輪走行や歩行と車輪移動の切り換えに成功しています.
|
(a) 最大加速度での実験 最大加速度(車輪の滑らない範囲)での実験映像です. ◇ 最大加速度:1.7[m/s2],最大速度:0.61[m/sec] | |
|
(b) 8の字 “8の字”の経路を設定し行った実験の映像です. | |
|
(c) 歩行と車輪走行の切り換え実験 高さ73[mm],長さ約600[mm]の木製の台を設置し行った実験の映像です. | |
| ■ 今後の展望 |
現段階ではリアルタイムでの安定化制御を導入しておらず,外乱に対して対応できないので,この問題を解決する 制御法の構築が今後の課題です.
| |||||||||||||||||||||||||||||