■ 骨盤運動と脚弾性を活用した走行モデルの考案 |
||
|
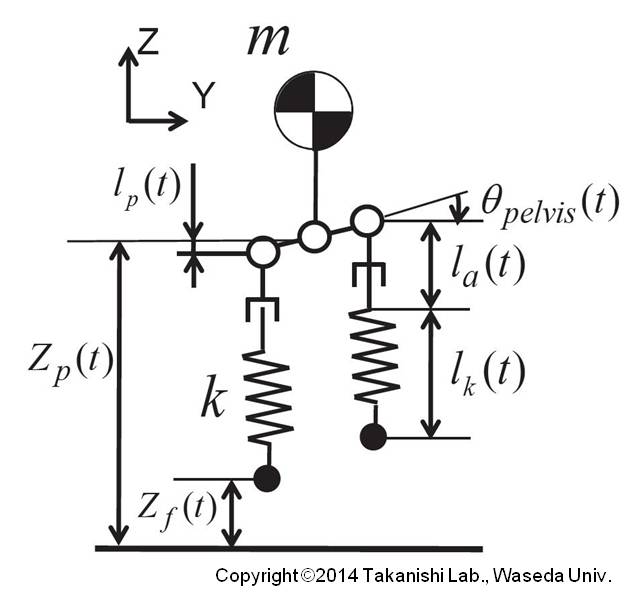
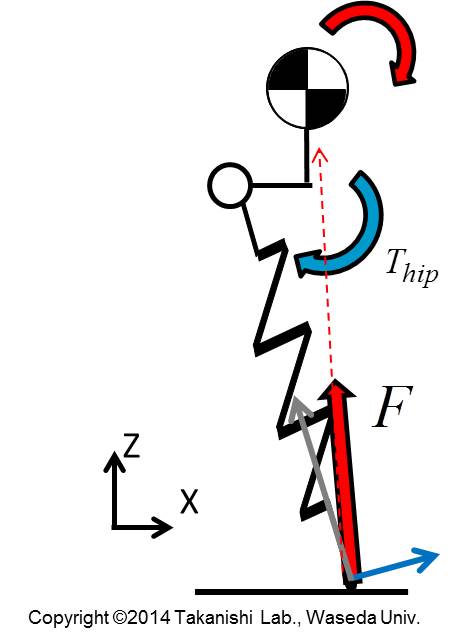
人間の走行運動の模擬を目的に,人間の走行運動の調査を行い,人体計測データから前額面の骨盤運動に着地衝撃吸収や蹴り出す力の補助への寄与が示唆されました.そこで,既存のSLIP モデルに骨盤部を加えたSLIP2 (Spring Loaded Inverted Pendulum using Pelvis)モデルを考案し,これに基づく骨盤振動による跳躍制御を開発し,シミュレーションにより跳躍運動および着地位置制御による走行運動を実現しました. また,0.1[m]の高さから落下させた場合の着地および跳躍について,人間のような重心の振動に対して位相がずれた骨盤運動の影響を検証しました.その結果,位相のずれにより,着地衝撃吸収の効果や蹴り出す力の補助への影響が異なることが確認されました. |
|
| ○SLIP2モデルを用いたシミュレーション | ||
|
|
||
|
[関連論文] ・Takuya Otani et al., "Utilization of Human-Like Pelvic Rotation for Running Robot," Front. Robot. AI Vol.2, No. 17, June, 2015. doi: 10.3389/frobt.2015.00017. |















")
")








