History of Waseda Talker Series(from WT-1 to WT-7R)
1.WT-1 (Waseda Talker No.1) (2000)
We developed a talking robot WT-1 (Waseda Talker No.1) to reproduce a human
vocal movement. WT-1 has vocal organs (the 1-DOF (degrees of freedom) lungs
and 1-DOF vocal cords) and articulators (the 6-DOF tongue, 4-DOF lips,
1-DOF teeth, nasal cavity and 1-DOF soft palate) like a human. The total
DOF is 15. The dimensions are about 1.2-1.3 times larger than an adult
male's. WT-1 could speak Japanese vowels (/a/, /i/, /u/, /e/, /o/).
2.WT-1R (Waseda Talker No.1 Refined) (2001)

We developed another talking robot WT-1R that improved on WT-1 for the
realization of consonant sounds. WT-1R has vocal organs (the 1-DOF lungs
and 1-DOF vocal cords) and articulators (the 6-DOF tongue, 4-DOF lips,
1-DOF teeth, nasal cavity and 1-DOF soft palate) like a human. The total
DOF is 15. WT-1R could speak Japanese vowels (/a/, /i/, /u/, /e/, /o/)
and some consonant sounds (/s/, /h/, /m/, /p/ and "Waseda").
3.WT-2 (Waseda Talker No.2) (2002)

We developed a new talking robot WT-2 (Waseda Talker No.2) for the production
of human-like natural voices. WT-2 has the 1-DOF lung, 3-DOF vocal cords,
5-DOF tongue, 4-DOF lips, 1-DOF teeth, nasal cavity and 1-DOF soft palate:
The total DOF is 15. The length of the vocal tract is about 175[mm] and
almost same as an adult male's. Compared with the previous robots (WT-1
and WT-1R), WT-2 could speak Japanese vowels more clearly, and produce
all Japanese consonant sounds.
4.WT-3 (Waseda Talker No.3) (2003)

We developed a new advanced talking robot WT-3 (Waseda Talker No.3) that
improved on WT-2. WT-3 consists of 1-DOF lungs and 3-DOF vocal cords and
articulators (the 7-DOF tongue, 5-DOF lips, 1-DOF teeth, nasal cavity and
1-DOF soft palate), and could reproduce human-like articulatory motion;
the total DOF was 18. WT-3 could produce vowels more clearly, and produce
stops, fricatives and nasal sounds with the new flexible mechanisms that
functioned as the human vocal tract area and the other mechanisms.
5. WT-4 (Waseda Talker No.4) (2004)

We developed a new anthropomorphic talking robot WT-4 (Waseda Talker No.4)
that improved on WT-3. WT-4 had a human-like body to make the communication
with a human more easily, and consisted of the total DOF was 19. We constructed
an autonomous control method of WT-4 to mimic continuous human speech sounds
by auditory feedback. In this method, the trajectory of each robot parameter
was controlled so that the acoustic parameters (pitch, sound power, formant
frequencies that are resonant frequencies of the vocal tract and have the
peak of the output spectrum, and the timing of the switch between voiced
and voiceless sounds) generated from the robot were close to those of human
speech sounds.
Mimic Speech of Talking Robot WT-4
Click the following pictures and see the Talking Robot movie.
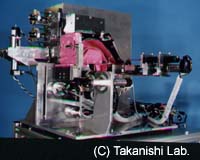
6. WT-5 (Waseda Talker No.5) (2005)

We developed a new anthropomorphic talking robot WT-5 (Waseda Talker No.5). WT-5 consisted of 1-DOF
lungs, 3DOF vocal cords and articulators (the 7-DOF tongue, 5-DOF lips, 1-DOF teeth, nasal cavity and
1-DOF soft palate), and could reproduce human-like articulatory motion; the total DOF was 18. We developed
the mechanical lips and vocal cords with similar size and biomechanical structure to the human.
We constructed an autonomous control method of WT-5 to mimic continuous human speech sounds including
consonant sound by sensory and auditory feedback. In this method, we used tactile and intraoral pressure
information to optimize the production of consonant sound. We also developed efficient optimization
methods of auditory feedback by using speech recognition software.
Demonstration of Talking Robot WT-5
Click the following pictures and see the Talking Robot movie.
7. WT-6 (Waseda Talker No.6) (2006)

We produced a new anthropomorphic talking robot WT-6 (Waseda Talker No.6).
WT-6 consisted of 1-DOF lungs, 5-DOF vocal cords and articulators (the
5-DOF tongue, 4-DOF lips, 1-DOF jaw, nasal cavity and 1-DOF soft palate),
and could reproduce human-like articulatory motion; the total DOF was 17.
The length of the vocal tract is about 180[mm] and almost same as an adult
male's. WT-6 has independent jaw opening/closing mechanism and three-dimensional
tongue and vocal cavity made of thromoplastic rubber Septon (R) by Kuraray.
The vocal cord model was also improved by adding new pitch control mechanism.
8. WT-7 (Waseda Talker No.7) (2007)

We developed a new anthropomorphic talking robot WT-7 (Waseda Talker No.7) mimicking human
biomechanical structure. WT-7 consisted of Vocal organ (the 4-DOF vocal cords and 1-DOF lungs) and
articulators (the 7-DOF tongue, nasal cavity and 1-DOF soft palate, 5-DOF lips, and 1-DOF jaw),
and could reproduce human-like articulatory motion; the total DOF was 19.Vocal cords, tongue and
face were made of thromoplastic rubber Septon (R) by Kuraray. This material is so flexible and
stretchable.
Vocal cord model was also improved by adding new pitch control mechanism (80[Hz]). By adopting
new linkage mechanism, the tongue mechanism could reproduce the oral cavity conformation more accurately
than the previous one.
9. WT-7R (Waseda Talker No.7 Refined) (2008)

We developed another talking robot WT-7R that improved on WT-7 for the clearness of vowels.
WT-7R consisted of Vocal organ (the 5-DOF vocal cords and 1-DOF lungs) and articulators (the 7-DOF
tongue, nasal cavity and 1-DOF soft palate, 4-DOF lips, and 1-DOF jaw), and could reproduce human-like
articulatory motion; the total DOF was 19. we constructed the tongue mechanism with higher density.
The deformation is 7[mm] and sufficient for reproducing the vocal tract shape. In addition,
the space covered by the elastic tongue is filled with the ethylene glycol to improve vocal
tract resonance. As a result, the robot could produce more clear vowels, especially the bandwidth
of /o/ vowel narrowed by 50[Hz].