Previous Research
WL(Waseda Leg) Series
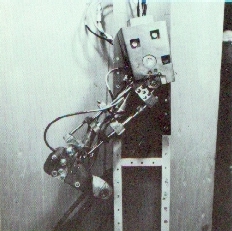 |
The artificial lower-limb WL-1 was constructed on the basis of a human’s leg mechanism in 1967. Through biped experiments, we investigated the fundamental functions of a biped locomotion. |
 |
The mechanical model of lower-limbs, WL-3 was constructed which had an electro-hydraulic servo-actuator in 1969. It achieved a human-like motion in a swing phase and a stance phase, and a standing and sitting motion. |
 |
WL-5 had a total of eleven mechanical degrees of freedom; two five DOF legs and one DOF trunk. It could change the direction by using a program control(1971). |
 |
WABOT-1 developed by the late Ichiro Kato and co-works was the world’s first full-scale anthropomorphic robot. It was able to communicate with a human in Japanese and to measure the distances and directions of objects using external receptors such as artificial ears and eyes. Hydraulically powered, it uses disproportionately large feet for stability. A shuffler more than a walker, WABOT-1 realized “static walking” in 1973. |
 |
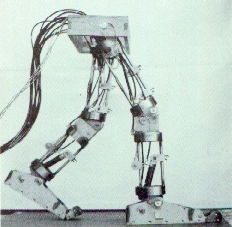
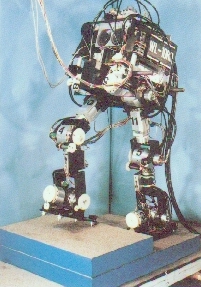
WL-9DR achieved quasi-dynamic walking for the first time in the world, which used a 16-bit microcomputer as its controller. It had a total of ten mechanical degrees of freedom. |
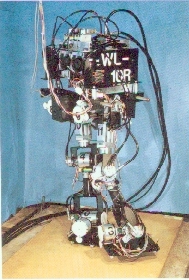 |
WL-10R was constructed by the rotary type servo-actuators and carbon-fiber reinforced plastic(CFRP) in 1983. It achieved forward and backward walking, turning on the plane. |
 |
WL-10RD achieved a complete dynamic walking on the plane with the step time of 1.3 s/step using a program and sequence control. Also, the dynamic walking on the uneven terrain such stairs and inclined planes was realized with the step time of 2.5 s/step. |
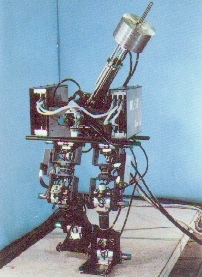 |
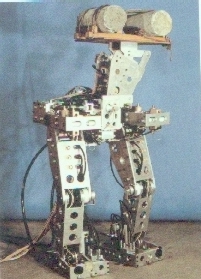
A hydraulic biped robot WL-12 having an upper body and a two-degrees-of-freedom waist was constructed to realize more human-like motion in 1986. A new control algorithm was developed to improve walking stability, which compensates for moment generated by the motion of the lower-limbs using the trunk motion. The dynamic biped walking was realized under external forces of unknown environments and on unknown walking surfaces. |
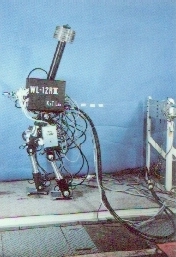 |
WL-12RDIII was able to maintain stable dynamic walking in unknown paths, and stairs in a human residential environment. The dynamic walking was accomplished by the introduction of a new adaptive control method using mechanical hardware and software into the conventional biped walking control method using the trunk motion.
|
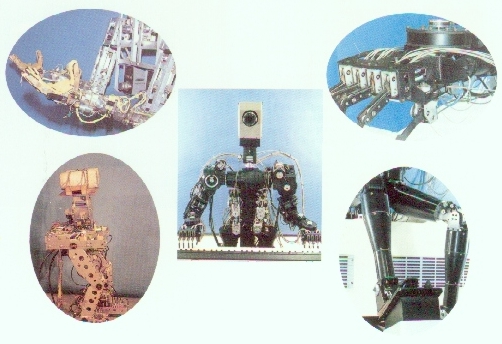
WABIAN(WAseda BIpedal humANoid) Series
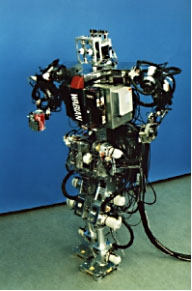 |
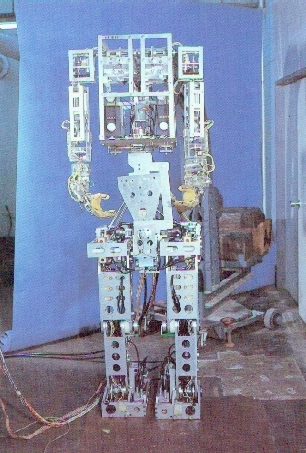
WABIAN was developed under the following design plan to investigate a cooperative dynamic walking and a collaborative work with humans. (1) The size of the biped robot should be the average size of an adult Japanese woman to do a collaborative work with humans. (2) The robot should be able walk at approximate human speed. (3) The robot should have 3 DOF trunk and 6 DOF arms. (4) The joints of the robot should use electric servomotors. (5) A control computer and motor drives except power supply should be installed. WABIAN had a total of thirty-five mechanical DOF; two three DOF legs, two ten DOF arms, a two DOF neck, four DOF in the eyes and a torso with a three DOF waist. We have realized a various number of walking such as dynamic forward and backward walking, marching in place, dancing, carrying a load, emotional walking, etc. |
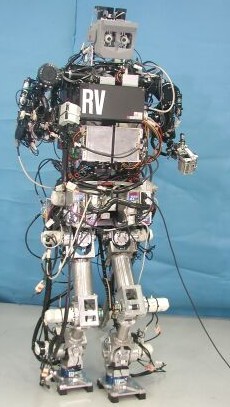 |
WABIAN-RV can various walking motions by online generating and outputting motion pattern on every steps. It is based on the online pattern generation method and this method improve environmental adaptability.
|