In the near future Japan is becoming an aging society. A quite high number of the olders are suffering from disabilities and problems in their lower limbs. This increases the demand for the development of welfare equipments. However, conventional evaluation methods for the equipments depend on human body measurements,
and there are problems of the reproducibility, measuring accuracy, and human safety during the experiments,in particular.
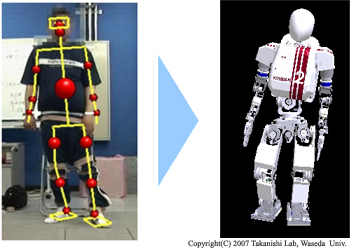
Therefore, our group has suggested applying a biped humanoid robot as a human motion simulator.
That means a robot which can perform equal exercises with human beings tests welfare equipments under development in place of a human, and provides quantitative data.
We expect this new evaluation method would be safe, quantitative and versatile.
6-axis force/torque sensor Photo sensor Magnetic encoder Gyro sensor
Actuators
DC servo motor
Reduction mechanism
Harmonic drive gear Timing-belt/pulley
Batteries
Li-ion battery
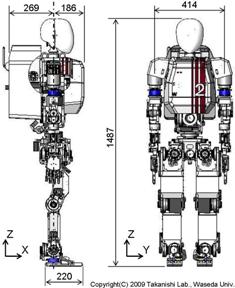
Drawing
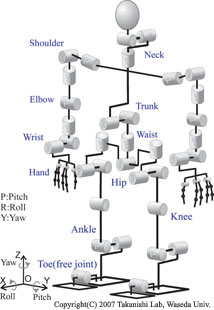
DOF configuration
Front
Right
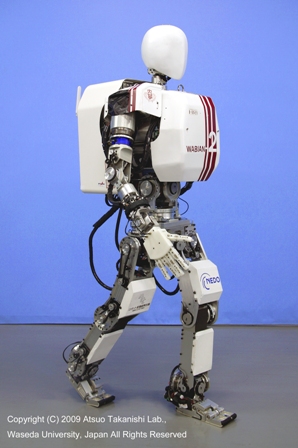
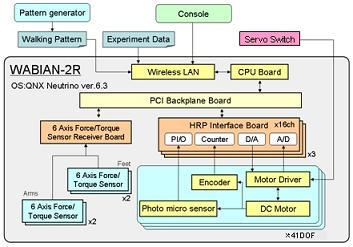
WABIAN-2R has been designed with 1500mm in height, and 64kg
in weight. In order to mimic human movements, the robot has 41 DOFs and
the movable range of the joints designed in reference to human's one.
WABIAN-2R (2009)
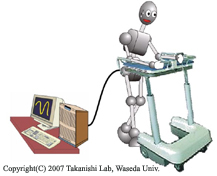
The computer mounted on the trunk controls the motion of WABIAN-2R. It consists of a PCI CPU board and PCI I/O boards.
As the I/O boards, HRP interface boards (16ch D/As, 16ch counters, 16ch PIOs), and 6-axis force/torque sensor receiver board are mounted.
The operating system is QNX Neutrino ver. 6.3.
The drive system consists of a DC servo motor with an incremental encoder attached to the motor shaft, and a photo sensor to detect the basing angle.
Also, each ankle has a 6-axis force/torque sensor, which is used for measuring Ground Reaction Force (GRF) and Zero Moment Point (ZMP).
Control system
[References]
Yu Ogura, Hiroyuki Aikawa, Kazushi Shimomura, Hideki
Kondo, Akitoshi Morishima, Hun-ok Lim and Atsuo Takanishi, "Development
of A Humanoid Robot WABIAN-2," Proceedings of the 2006 IEEE International
Conferenceon Robotics and Automation, pp. 76-81, Orlando, USA, May, 2006.
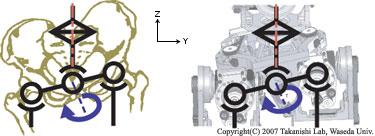
Because of the mechanical constraint, most of the biped robots perform a bent-knee gait (walk with the knees bent during walking).
On the other hand, researches on human gait's analysis show that the pelvis motion plays a significant role in human's gait.
Taking into account the results of these researches, our team developed a 2-DOF (roll, yaw) waist.
By using the redundant mechanism, the robot is able to perform a stretch-knee gait as well as human being does.
Walking with the knees stretched
Walking cycle: 1.0[s/step]
Step length: 200[mm/step]
Knee-stretched Walking 2
Walking with the knees stretched outdoor
Walking cycle: 1.0[s/step]
Step length: 200[mm/step]
[References]
Aiman Musa M. Omer, Yu Ogura, Hideki Kondo, Akitoshi Morishima,Giuseppe Carbone, Marco Ceccarelli, Hun-ok Lim, and Atsuo Takanishi."Development of A Humanoid Robot Having 2-DOF Waist and 2-DOF Trunk ",5th IEEE-RAS International Conference on Humanoid Robots, pp. 333-338,Tsukuba, Japan, December, 2005.
�� Foot with a passive toe joint (2006)
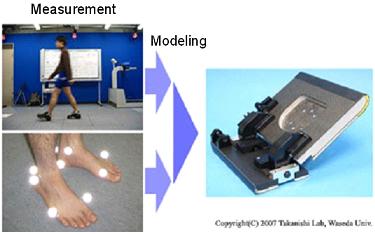
A human foot has a complex structure consisting of a lot of bones. Based on the result of gait analysis with motion capture system,
we have developed a new foot which has a passive toe joint.
Some of the clinical reports on toes' function indicate that toes do not produce thrust during steady gait.
Since, in the current stage of our research, we focus on in steady walking, we have decided to develop a foot with a passive toe joint.
Its main advantages are lightness and no necessity of a complex control.
Foot with a passive toe joint
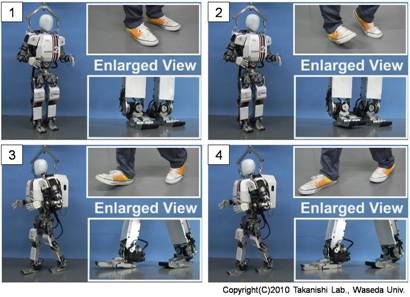
��Human-like walking (Knee-stretched walking with heel-contact and toe-off motion)
Comparison of the foot motions between the robot and human
Detail 2
Detail of the foot motion while walking
[References]
Yu Ogura, Kazushi Shimomura, Hideki Kondo, Akitoshi Morishima, Tatsu Okubo, Shimpei Momoki, Hun-ok Lim and Atsuo Takanishi, "Human-like Walking with Knee Stretched, Heel-contact and Toe-off Motion by a Humanoid Robot," Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3976-3981, Beijing, China, October, 2006.
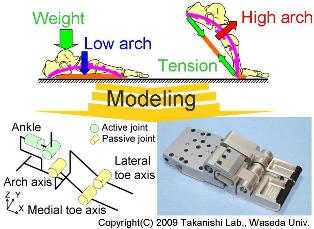
�� Foot mechanism mimicking human arch structure (2009)
Foot with human-like arch structure
What is distinct in human beings compared to animals is that our feet are equipped with
arch like structure. Researchers in human science field agree that the arch in human foot has
significant influence to the gait, however it has never been fully investigated.
The goal
of this research is to implement the arch containing foot in the humanoid robot and further
elaborate the influence of the foot arch to the gait of human being.
The stiffness of the arch changes depending on the stage of the gate. It is thought, that the
stiffness is very low in the flat foot phase, it rises with movement of the body
forward and reaches its highest value at the toe-off phase.
Experiments we performed after
completing the development, proved that the arch structure absorbs the impact generated
when sole fully contacts the ground.
��Walking with heel contact and toe-off motion of WABIAN-2R
equiped with feet containing human-like arch structure.
Kenji Hashimoto, Yuki Takezaki, Kentaro Hattori, Hideki Kondo,Takamichi Takashima, Hun-ok Lim and Atsuo Takanishi, "A Study of
Function of the Human's Foot Arch Structure Using Biped Humanoid Robot,"Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2206-2211, Taipei, Taiwan, October, 2010.
�� Shoes-wearable foot mechanism (2013)
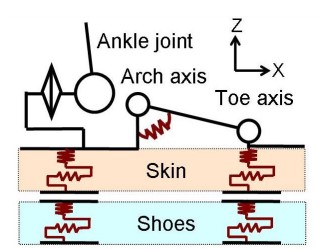
We developed a shoes-wearable foot mechanism which mimics human�fs
foot arch structure and the characteristics of the foot skin to examine
the effect of the human foot on biped walking. We approximate the arch
structure by a rotational spring and model the human�fs foot skin with compression
springs. The mimesis of the foot arch elasticity is realized by using compression
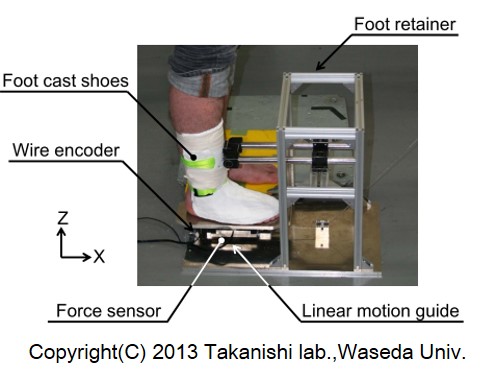
springs. Regarding the characteristics of human�fs foot skin, first we develop
a measuring equipment to measure the human�fs plantar transverse elasticity.
We set the target value of the modulus of transverse elasticity of the
foot skin and the modulus of compression elasticity, referring to a relevant
study. The characteristics of human�fs foot skin are mimicked by using a
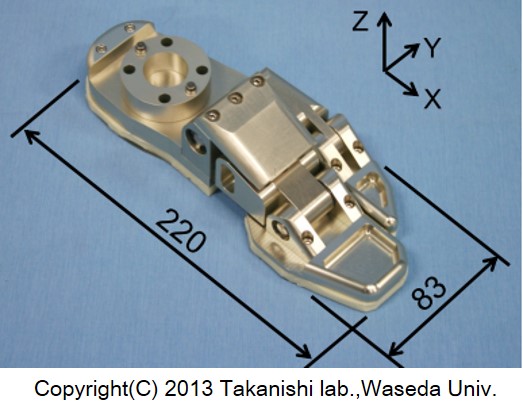
super-soft urethane resin called Hitohada-gel with 8 mm thick. Through
evaluation tests we confirmed that the shoes-wearable foot mechanism could
mimic well the characteristics of human�fs foot arch and skin.
Modeling of human�fs foot structure
including foot arch, skin, and shoes.
measuring equipment to measure
the human�fs plantar transverse elasticity
Shoes-wearable Foot Mechanism
[References]
Kenji Hashimoto, Hiromitsu Motohashi, Takamichi Takashima, Hun-ok Lim and Atsuo Takanishi, "Shoes-wearable Foot Mechanism Mimicking Characteristics of Human's Foot Arch and Skin," Proceedings of the 2013IEEE International Conference on Robotics and Automation, pp. 678-683, Karlsruhe, Germany, May, 2013.
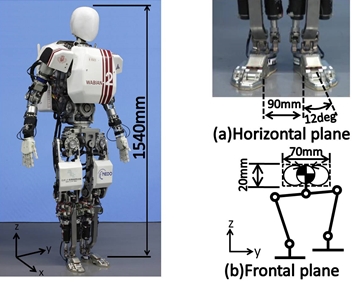
�� Leg mechanism mimicking walking on frontal and horizontal plane (2012)
Leg mechanism mimicking walking on frontal and horizontal plane
Few researches were conducted on the movement of the center of mass (CoM) for the frontal plane in biped humanoid robots. Hence, the goal of this study is to mimick the CoM movement in human walking on the frontal plane.
In humans, the amplitude of the movement of the CoM to the right and left on the frontal plane during walking is 30 mm. However, for WABIAN-2R it is 50 mm, i.e. almost twice as big as for humans.
One of the possible causes is that on the horizontal plane, WABIAN-2R is not able to mimick the human walking, because the step width of humans is 90 mm, while for WABIAN-2R it is 180 mm.
That is why we have developed a new leg mechanism with the size of a human leg and with a foot angle and step width closer to those of a human. Walking with a step width of 90 mm and a foot angle 12 deg is achived, mimicking human walking on the frontal plane.
Moreover, the movement amplitude of COM to the right and left on the frontal plane during walking of WABIAN-2R became 34 mm, being comparable to the humans' one.
Takuya Otani, Akihiro Iizuka, Daiki Takamoto, Hiromitsu Motohashi,Tatsuhiro Kishi, Przemyslaw Kryczka, Nobutsuna Endo, Lorenzo Jamone,Kenji Hashimoto, Takamichi Takashima, Hun-ok Lim and Atsuo Takanishi,"New Shank Mechanism for Humanoid Robot Mimicking Human-like Walking in Horizontal and Frontal Plane," Proceedings of the 2013 IEEE International Conference on Robotics and Automation, pp. 659-664, Karlsruhe, Germany, May, 2013.
As an example of the robot's applications, we had emulation experiments of a disabled person's gait. We used the walking data of a disabled person,
recorded with motion capture system. Optimazing a part of walking parameters with Genetic Algorithm (GA),
the robot achieve a good balance between walking stably and reproducting the gait. As the result, we confirmed the effectiveness from the stick diagram
in the sagittal plane and the comparison of each joint angle.
Emulation of a disabled person's gait
��Emulation of a disabled person's gait (2007)
The emulation of a disabled person's gait
Emulation of a disabled person's gait
[References]
Hideki Kondo, Akitoshi Morishima, Yu Ogura, Shimpei Momoki, Juri Shimizu, Hun-ok Lim and Atsuo Takanishi, "Algorithm of Pattern
Generation for Mimicking Disabled Person's Gait," Proceedings of the second IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 724-729, Arizona, USA, October, 2008.
�� Quick turn by using slipping motion with both feet (2010)
Turn by using slipping motion
Humans can do motions with a slip such as a shuffle and a turn.
It is expected that the advantage of slipping motions are quick, less energy consumption
and more stable against disturbing force because both feet are on the ground during a moton.
We realized a turn by slipping motion by switching ground contact conditions like human's slipping turn.
Furthermore, we implemented a stabilization control by using the rear foot to keep the posture while turning.
Those control realized quick turn about 90[deg] in about 2[s] by using slipping motion.
Moreover, it is revealed that a slipping turn decreased 65% of the energy consumption compared with that of a stepping turn.
��Quick turn by using slipping motion with both feet
Quick turn by using slipping motion with both feet
Turning phase: 1.5[s]
Switching phase: 0.25[s] x 2
Angle of turn: 90[deg]
[References]
Kenji Hashimoto, Yuki Yoshimura, Hideki Kondo, Hun-ok Lim and AtsuoTakanishi, "Realization of Quick Turn of Biped Humanoid Robot by Using Slipping Motion with Both Feet," Proceedings of the 2011 IEEE International Conference on Robotics and Automation, pp. 2041-2046,Shanghai, China, May, 2011.
�� A robotic implementation of a bio-inspired head motion stabilization
model (2012-2013)
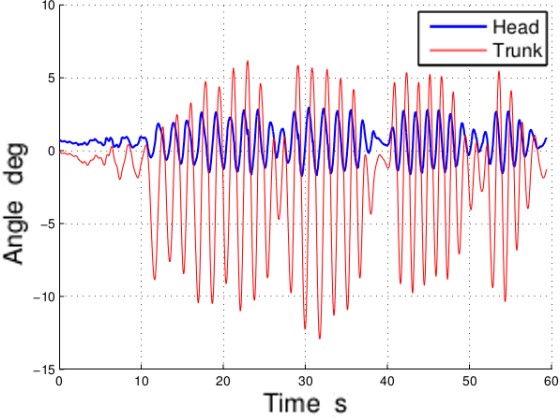
�@The neuroscientific research shows that humans tend to stabilize their
head orientation, while accomplishing a locomotor task. In order to replicate
head movement behaviors found in human walk it is necessary and sufficient
to be able to control the orientation (roll, pitch and yaw) of the head
in space. The described behaviors can be replicated by giving suitable
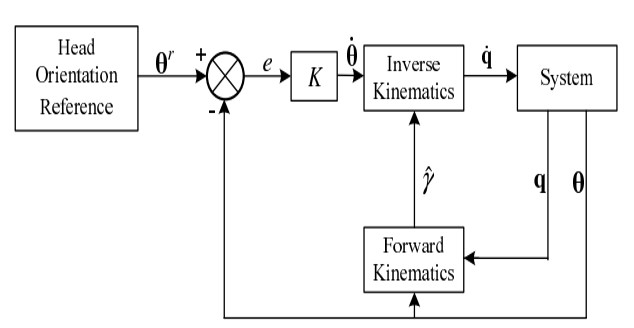
references to the head orientation. This controller is based on a machine
learning algorithm able to learn the compensation for the head movements
when no stabilization mechanism is present.Based on these principles, a
model based on an inverse kinematics controller has been designed. We introduce
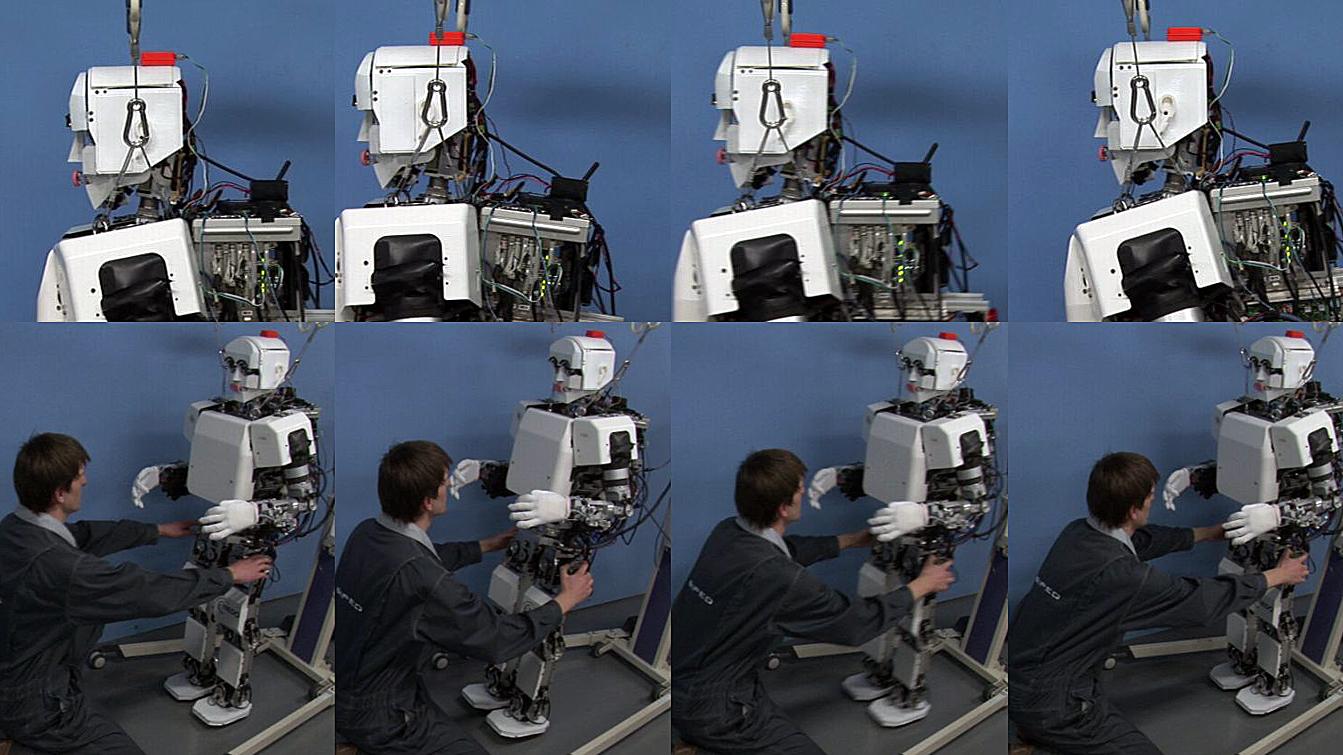
implementation of the model on a humanoid platform.Along we present results
of two sets of experiments performed to verify two aspects of the proposed
model. The results prove that the model can be used to efficiently stabilize
the head's orientation.
Block diagram of head stabilization control.
Frame cuts from the high amplitude swinging experiment.
Notice the constant head orientation vs. changing trunk orientation.
Pitch angle of head and trunk during high amplitude
swinging of the robot's body
[References]
Przemyslaw Kryczka, Egidio Falotico, Kenji Hashimoto, Hun-ok Lim,Atsuo Takanishi, Cecilia Laschi, Paolo Dario and Alain Berthoz, "A
robotic implementation of a bio-inspired head motion stabilization model on a humanoid platform," Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2076-2081, Vilamoura, Algarve, Portugal, October, 2012.
Egidio Falotico, Nino Cauli, Kenji Hashimoto, Przemyslaw Kryczka,Atsuo Takanishi, Paolo Dario, Alain Berthoz and Cecilia Laschi, "Head
Stabilization Based on a Feedback Error Learning in a Humanoid Robot,"Proceedings of the 21st IEEE International Symposium on Robot and Human Interactive Communication, pp. 449-454, Paris, France, September, 2012.
�� Walking experiments with a walk-assist machine (2005)
As one of the applications as the human motion simulator, we carried out walking experiments with a walk-assist machine.
Generally, an armrest of a walk-assist machine is set to equal height of a user's elbow.
And it is known that the severer his/her disability is, the lower we should set the armrest.
Measuring the current value of the motors at the knee joints
and the forces & torques which are applied to the arms and legs, we
are able to calculate the energy consumption at knee joints and the load
to arms. Then we found the fact with quantitative data that the lower we
set the height of the armrest, the less the load of knees is.
This is a good example that human motion simulator can evaluate empirical facts quantitatively.
From the results of these experiments, we confirmed that we can evaluate welfare equipments quantitatively with a human motion simulator.
WABIAN-2 with a walk-assist machine
��Walking experiments with a walk-assist machine (2005)
Simulations of walking assisted by a walk-assist machine
Knee-stretched walking with a walk-assist machine
[References]
Aiman Musa M. Omer, Hideki Kondo, Hun-ok Lim, and Atsuo Takanishi."Development of Walking Support System Based on Dynamic Simulation," IEEE International Conference on Robotics and Biomimetics (Robio 2008), pp.137-142., Bangkok, Thailand, February, 2009.
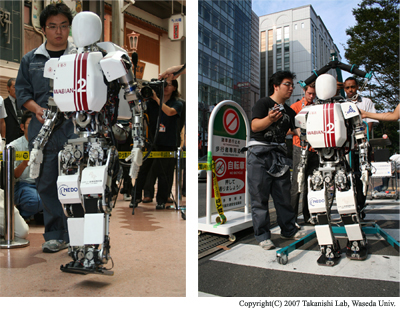
�� Experiments in public roads in Fukuoka city (2006-2007)
For expansion of applied fields, we experimented in the environment where a human being lives.
In particular, in public roads in Fukuoka city that was the one of the special zones for robot development and test,
to confirm problems with the present walking ability, and to develop new control systems.
This experiment was commissioned by the Robotics Industry Development Council (RIDC).
Experiments in public roads in Fukuoka city
[References]
Hyun-jin Kang, Shimpei Momoki, Hideki Kondo, Kenji Hashimoto, Hun-ok Lim and Atsuo Takanishi, "Attitude Compensation Control for BipedHumanoid Robot," Proceedings of the 12th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, pp. 677-684, Istanbul, Turkey, September, 2009.
�� Foot mechanism capable of detecting ground surface (2008-2010)
Since outdoor roads are not only rough and inclined, but also undulated it is not possible
to perform the stable gait with use of flat feet. To cope with outdoor roads irregularities we improved
the foot mechanism created in 2008 and come up with solution allowing us to negotiate also undulated surfaces.
By implementing four moving pins on the corners of the foot, we change from the
surface contact to the four points ground contact. Moreover, by sensing the displacement of
each of the pins, we sens the shape of the ground and optimize the foot placement. With this
solution, we were able to realize stable walk on the undulated surface with 20[mm] high
unevenness.
Foot able to sens the surface shape
Foot adaptation
��Walking on rough terrain in laboratory conditions (2009)
��Walking on inclined surface (2009)
Verification of foot adaptation to uneven surface
Height of obstacles: 5-20[mm]
Verification of foot adaptation to the inclined surface
Robot starts the gait from the flat surface and proceeds to the slope inclined: 7.0[deg]
�� Walking outdoor on rough surface (2009)
Rough and inclined surface
Undulation height: 0-15[mm]
Inclination: 8.0[deg]
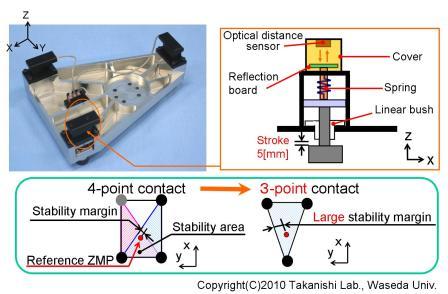
We have developed a 4-point contact foot mechanism with the function capable of detecting
ground surface for biped robots to realize stable walking on even/uneven terrain. However, a biped
robot with the foot mechanism was often unstable while walking on uneven terrain due to the small stability margin,
foot slipping and sensor glitches.
So, a 3-point contact foot mechanism that can deal with uneven terrain is developed in this
study. Biped robots will be able to retain larger stability margin,
and prevent the foot from slipping at a contact point by using the new foot mechanism.
The effectiveness of the new mechanism is confirmed through walking experiments.
3-point Contact Foot Mechanism
��Prevention of the foot slippinge (2010)
Previous method
Height of obstacles: 20[mm]
New method
Height of obstacles: 20[mm]
��Walking on rough terrain in laboratory conditions (2010)
��Walking on inclined surface (2010)
Verification of foot adaptation to uneven surface
Height of obstacles: 5-20[mm]
Verification of foot adaptation to the inclined surface
Robot starts the gait from the flat surface and proceeds to the slope inclined: 7.0[deg]
[References]
Hyun-jin Kang, Kenji Hashimoto, Hideki Kondo, Kentaro Hattori, KosukeNishikawa, Yuichiro Hama, Hun-ok Lim, Atsuo Takanishi, Keisuke Suga and Keisuke Kato, "Realization of Biped Walking on Uneven Terrain by New Foot Mechanism Capable of Detecting Ground Surface," Proceedings of the 2010 IEEE International Conference on Robotics and Automation, pp.5167-5172, Anchorage, Alaska, May, 2010.
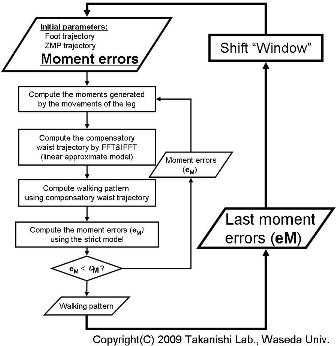
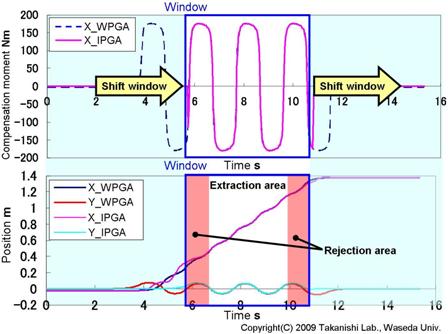
�� On-line generation of Furrier Transform based gait patterns (2009)
Flow chart
Calculation of compensation ZMP trajectory based on necessary compensation moment
Until now, gait patterns for WABIAN-2R were generated off-line and realized on the
platform with on-line short-period pattern modifications. The disadvantage of this method is that in some
circumstances, it is not possible to maintain a long time stability without modifying the
predefined gait pattern.
In order to solve this problem we implemented an on-line generation of gait patterns.
With this technology the robot can maintain long time stability. Moreover, it enables us
to modify the gait trajectory on-line (e.g. with use of joystick).
Hideki Kondo, Juri Shimizu, Kenji Hashimoto, Kentaro Hattori, Kosuke Nishikawa, Yuki Takezaki, Yuichiro Hama, Yuki Yoshimura, Hun-ok Lim and Atsuo Takanishi, "Realization of Walking by FFT-based Online Pattern Generation," Proceedings of the 12th International Conference on Climbing and Walking Robots and the Support Technologies for MobileMachines, pp. 615-622, Istanbul, Turkey, September, 2009.
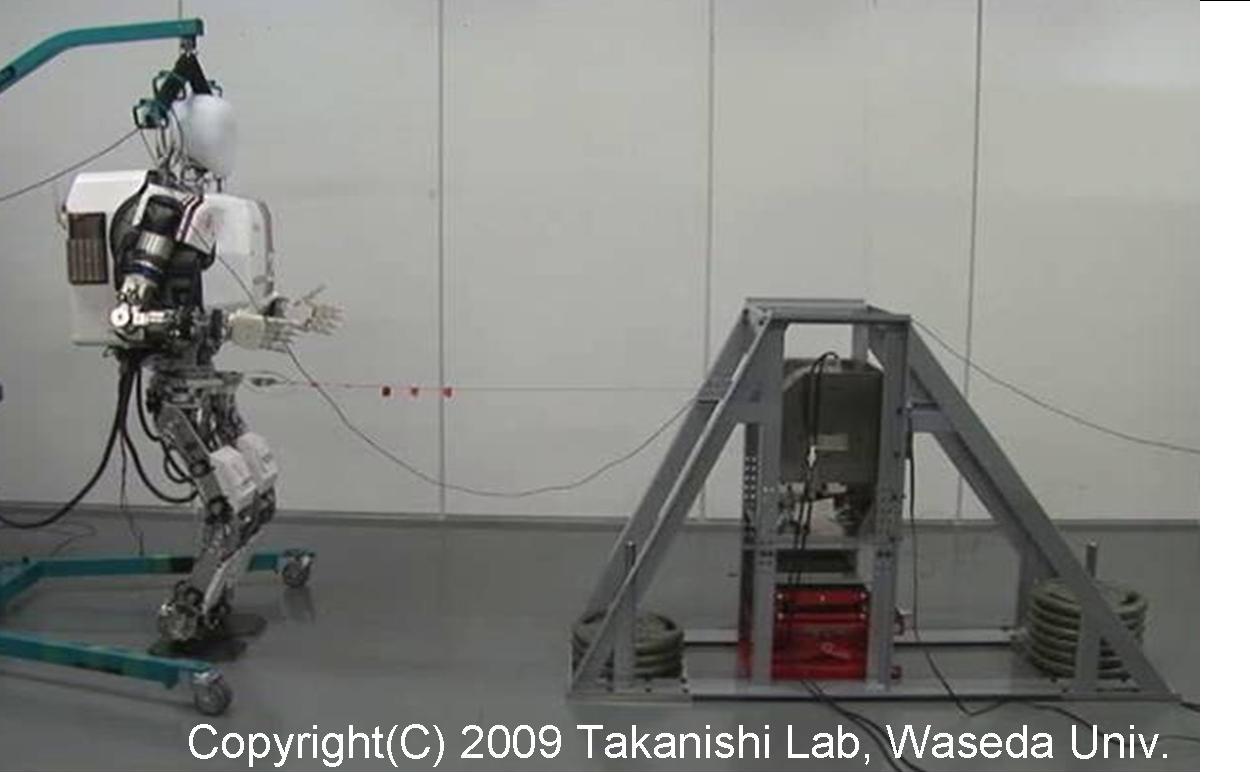
�� Device for repetitive application of disturbing force (2009)
Disturbance generator
In the real environment, robots are often subject to an unpredictable source of
disturbance, like collision with obstacles or human. Our group works on control system for
humanoid robots that would be able to respond to external disturbances. During algorithms
verification experiments performed thus far, the disturbing force was applied by human.
It is almost impossible for human to apply the same disturbing force in exactly the same phase
of the gait, which is necessary to evaluate the efficiency of the algorithm. To solve this problem we developed machine able to repetitively generate the
same disturbing force in any chosen time of the robot's gait.
[References]
Przemyslaw Kryczka, Kosuke Nishikawa, Juri Shimizu, Kenji Hashimoto,Aiman
Musua M. Omar, Hideki Kondo, Kentaro Hattori, Yuki Takezaki,Hun-ok Lim,
Atsuo Takanishi, Keisuke Suga and Keisuke Kato,�gDevelopment of Disturbance
Force Generator for Humanoid Robots�CThe proceeding of the 27st annual conference
of the robotics society of Japan �CJapan, 1S1-07�CSep�C2009�D
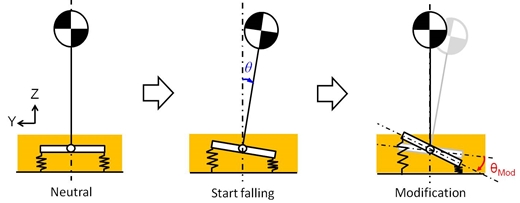
�� Walking on soft ground (2012)
Until now, there have been many researches aimed towards the stable walking of bipedal walking robots on real environment surfaces, but most of the successful researches were performed on rough terrains, hard enough not to deform.
However, in the real world there are not only hard grounds, but also many kinds of soft grounds such as sandy or snowy surfaces.
In this study, the goal was to achieve a stable walking on soft ground which by nature tend to change their shape. More specifically, we aimed to design a control system able to deal with soft ground, based on a prediction of the deformation of the surface given the force applied to it, obtained by modeling the soft ground.
By the development of a control to correct the posture of the
foot in response to the deformation of the ground, we succeeded in the
stable walking on a very soft urethane sponge (density: 22 �} 2 �~10-9[kg
/ mm 3 ]).
Kenji Hashimoto, Hyun-jin Kang, Masashi Nakamura, Egidio Falotico,Hun-ok Lim, Atsuo Takanishi, Cecilia Laschi, Paolo Dario and Alain
Berthoz, "Realization of Biped Walking on Soft Ground with Stabilization Control Based on Gait Analysis," Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.2064-2069, Vilamoura, Algarve, Portugal, October, 2012.
�� Simulation Based Study of Bipedal Robot on Moon Gravity (2010)
Forward jumping motion approach on moon gravity
Humanoid robots are expected to be applied for not only in the real environment, but also in the ultimate environment.
For example, to explore the surface of the moon.
The challenge of developing a bipedial robot to walking on the moon is really high due to the low gravity compared with that on earth.
The effect of the low gravity doesn't allow biped robots to walk fast.
So, it is better to switch to a running or jumping motion instead of walking.
We investigate the ability to perform a running or jumping motion on the moon.
[References]
Aiman Musa M. Omer, Kenji Hashimoto, Hun-ok Lim, and Atsuo Takanishi."Initial Study of Bipedal Robot Locomotion Approach on Different GravityLevels ", 2011 IEEE/SICE International Symposium on System Integration (SI International 2011), pp. 802-807, Kyoto, Japan, December 2011.
Aiman Musa M. Omer, Hun-ok Lim, and Atsuo Takanishi." Simulation Study of a Bipedal Robot Jumping Motion Approach on Moon Gravity ", IEEE International Conference on Robotics and Biomimetics (Robio 2010), pp.218-222, Tianjin, China, December 2010.
"SHINPO" was developed in a collaboration of tmsuk Co., Ltd. and Atsuo Takanishi Laboratory for a part of the robot exhibition at Niigata Science Museum, which Uchida Yoko Co., Ltd. had contracted for.
The 2-DOF waist enables it a more human-like walking style.
"KIYOMORI" was developed in a collaboration of tmsuk Co., Ltd. and the Atsuo Takanishi Laboratory.
The same as "SHINPO", the 2-DOF waist enables it a more human-like walking style.
We are trying to make the robot's ability higher to move close to humans and to have experiments with welfare equipments.
In the future, we will establish the method to evaluate medical and welfare devices.
Finally, we would also like to realize the human motion simulator, which can apply it to not only rehabilitation but also various fields.
A part of this research was commissioned by a Grant-in-Aid for the WABOT-HOUSE Project by Gifu Prefecture, "Project for the Practical Application of Next-Generation Robots" by The New Energy and Industrial Technology Development Organization (NEDO), The Robotics Industry Development Council (RIDC) and supported by JSPS KAKENHI Grant Numbers 18360126, 24360099 and RoboSoM project from the European FP7 program (Grant agreement No. 248366). And a part of this research was a collaborative research with TOYOTA Motor Corporation. This project is executed under Humanoid Robotics Institute, Waseda University.
Special thanks to SolidWorks Japan K.K for the 3D-CAD contribution, to QNX SOFTWERE SYSTEMS for the OS contribution,
to DYDEN Corporation for the wire and harness contribution, to KITO Corporation for the robot supporting crane contribution
and to every cooperative companies, local governments and public agencies.