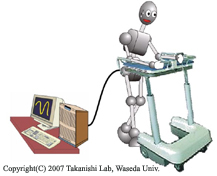
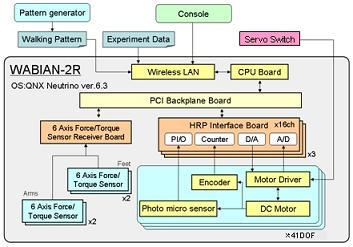
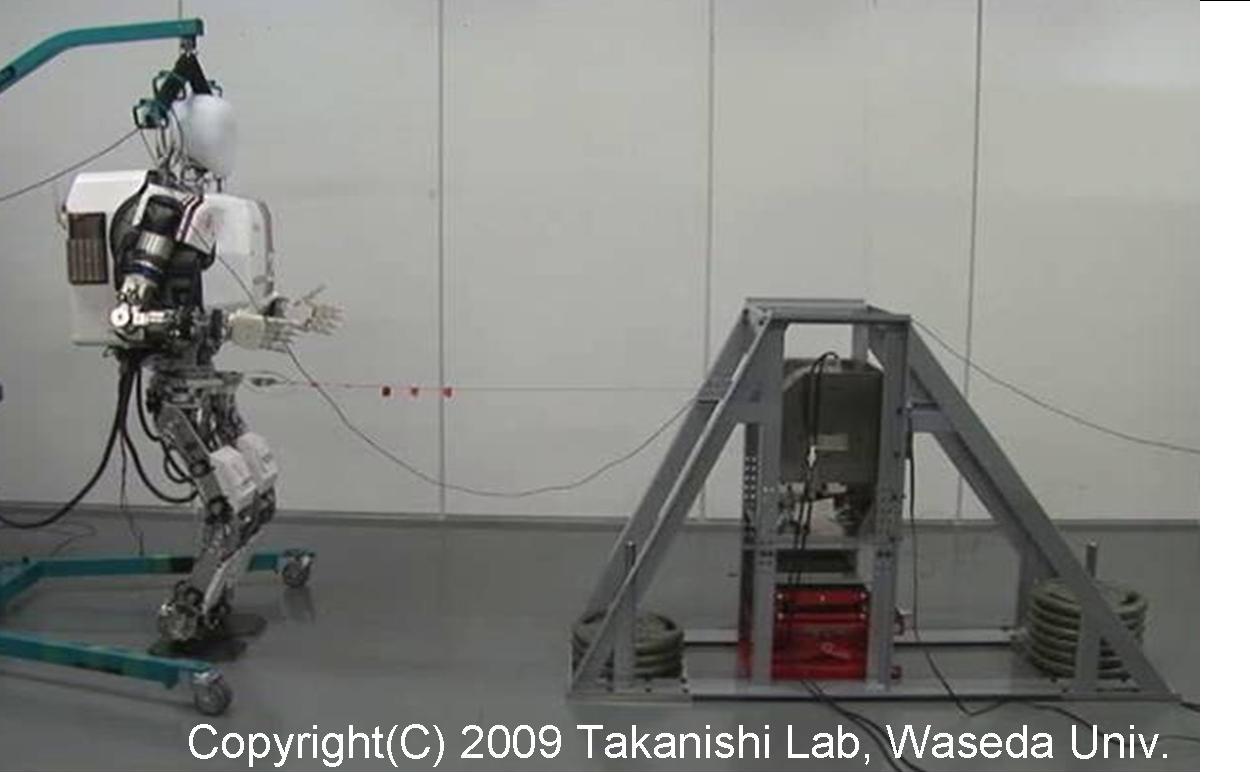
WABIAN-2Rは背中に搭載されたコンピュータにより制御されています.制御コンピュータはCPUボードと,I/Oボードから成り,PCIバスを通して接続されています.I/OボードはD/Aを16ch,カウンタを16ch,PIOを16ch搭載したHRP Interface Boardと,6軸力覚センサレシーバボードとなっています.
制御コンピュータに搭載しているOSはリアルタイムシステムである,QNXを採用しました.アクチュエータには回転角検出用にインクリメンタル式のエンコーダを搭載し,関節側には初期位置検出のためにフォトセンサを搭載しています.また,足首に6軸力覚センサを搭載することで床反力やZMP(Zero Moment Point)計測が可能です.
制御システム概要
[参考資料]
Yu Ogura, Hiroyuki Aikawa, Kazushi Shimomura, Hideki Kondo, Akitoshi Morishima, Hun-ok Lim and Atsuo Takanishi, "Development of A Humanoid Robot WABIAN-2," Proceedings of the 2006 IEEE International Conferenceon Robotics and Automation, pp. 76-81, Orlando, USA, May, 2006.
Aiman Musa M. Omer, Yu Ogura, Hideki Kondo, Akitoshi Morishima,Giuseppe Carbone, Marco Ceccarelli, Hun-ok Lim, and Atsuo Takanishi."Development of A Humanoid Robot Having 2-DOF Waist and 2-DOF Trunk ",5th IEEE-RAS International Conference on Humanoid Robots, pp. 333-338,Tsukuba, Japan, December, 2005.
Yu Ogura, Kazushi Shimomura, Hideki Kondo, Akitoshi Morishima, Tatsu Okubo, Shimpei Momoki, Hun-ok Lim and Atsuo Takanishi, "Human-like Walking with Knee Stretched, Heel-contact and Toe-off Motion by a Humanoid Robot," Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3976-3981, Beijing, China, October, 2006.
Kenji Hashimoto, Yuki Takezaki, Kentaro Hattori, Hideki Kondo,Takamichi Takashima, Hun-ok Lim and Atsuo Takanishi, "A Study of
Function of the Human's Foot Arch Structure Using Biped Humanoid Robot,"Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2206-2211, Taipei, Taiwan, October, 2010.
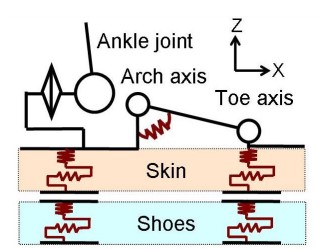
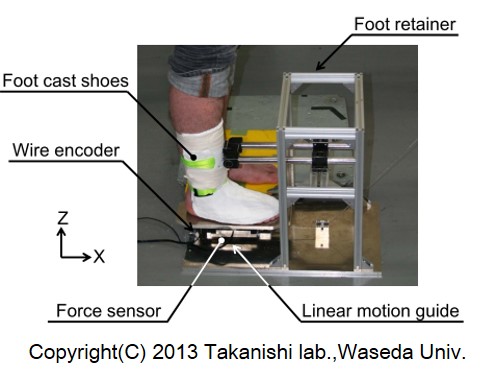
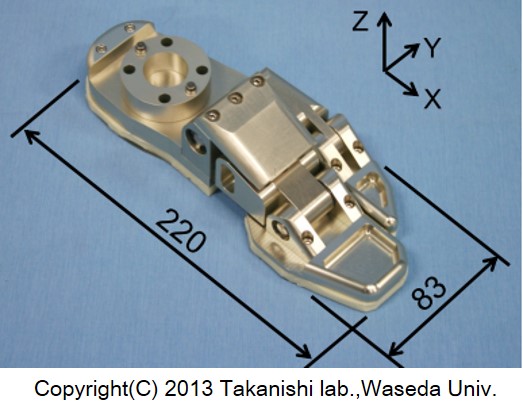
Kenji Hashimoto, Hiromitsu Motohashi, Takamichi Takashima, Hun-ok Lim and Atsuo Takanishi, "Shoes-wearable Foot Mechanism Mimicking Characteristics of Human's Foot Arch and Skin," Proceedings of the 2013IEEE International Conference on Robotics and Automation, pp. 678-683, Karlsruhe, Germany, May, 2013.
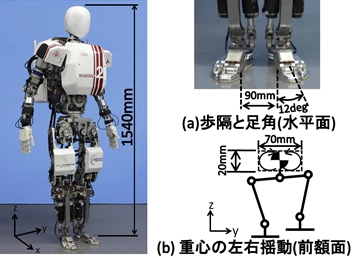
Takuya Otani, Akihiro Iizuka, Daiki Takamoto, Hiromitsu Motohashi,Tatsuhiro Kishi, Przemyslaw Kryczka, Nobutsuna Endo, Lorenzo Jamone,Kenji Hashimoto, Takamichi Takashima, Hun-ok Lim and Atsuo Takanishi,"New Shank Mechanism for Humanoid Robot Mimicking Human-like Walking in Horizontal and Frontal Plane," Proceedings of the 2013 IEEE International Conference on Robotics and Automation, pp. 659-664, Karlsruhe, Germany, May, 2013.
Hideki Kondo, Akitoshi Morishima, Yu Ogura, Shimpei Momoki, Juri Shimizu, Hun-ok Lim and Atsuo Takanishi, "Algorithm of Pattern
Generation for Mimicking Disabled Person's Gait," Proceedings of the second IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 724-729, Arizona, USA, October, 2008.
Kenji Hashimoto, Yuki Yoshimura, Hideki Kondo, Hun-ok Lim and AtsuoTakanishi, "Realization of Quick Turn of Biped Humanoid Robot by Using Slipping Motion with Both Feet," Proceedings of the 2011 IEEE International Conference on Robotics and Automation, pp. 2041-2046,Shanghai, China, May, 2011.
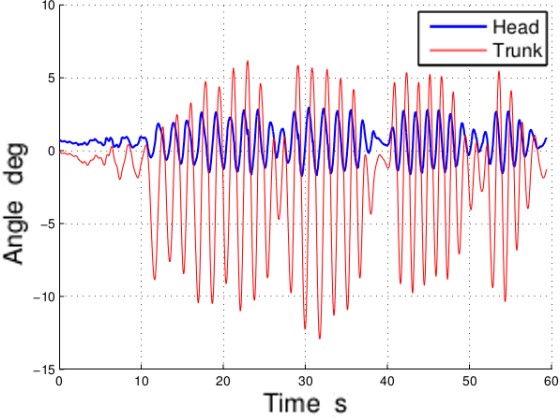
Przemyslaw Kryczka, Egidio Falotico, Kenji Hashimoto, Hun-ok Lim,Atsuo Takanishi, Cecilia Laschi, Paolo Dario and Alain Berthoz, "A
robotic implementation of a bio-inspired head motion stabilization model on a humanoid platform," Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2076-2081, Vilamoura, Algarve, Portugal, October, 2012.
Egidio Falotico, Nino Cauli, Kenji Hashimoto, Przemyslaw Kryczka,Atsuo Takanishi, Paolo Dario, Alain Berthoz and Cecilia Laschi, "Head
Stabilization Based on a Feedback Error Learning in a Humanoid Robot,"Proceedings of the 21st IEEE International Symposium on Robot and Human Interactive Communication, pp. 449-454, Paris, France, September, 2012.
Aiman Musa M. Omer, Hideki Kondo, Hun-ok Lim, and Atsuo Takanishi."Development of Walking Support System Based on Dynamic Simulation," IEEE International Conference on Robotics and Biomimetics (Robio 2008), pp.137-142., Bangkok, Thailand, February, 2009.
Hyun-jin Kang, Shimpei Momoki, Hideki Kondo, Kenji Hashimoto, Hun-ok Lim and Atsuo Takanishi, "Attitude Compensation Control for BipedHumanoid Robot," Proceedings of the 12th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, pp. 677-684, Istanbul, Turkey, September, 2009.
Hyun-jin Kang, Kenji Hashimoto, Hideki Kondo, Kentaro Hattori, KosukeNishikawa, Yuichiro Hama, Hun-ok Lim, Atsuo Takanishi, Keisuke Suga and Keisuke Kato, "Realization of Biped Walking on Uneven Terrain by New Foot Mechanism Capable of Detecting Ground Surface," Proceedings of the 2010 IEEE International Conference on Robotics and Automation, pp.5167-5172, Anchorage, Alaska, May, 2010.
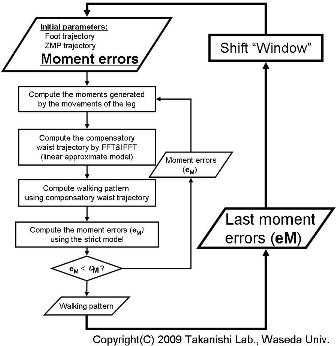
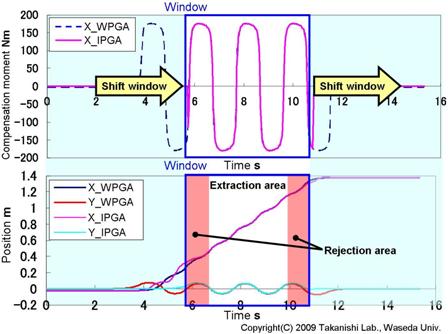
Hideki Kondo, Juri Shimizu, Kenji Hashimoto, Kentaro Hattori, Kosuke Nishikawa, Yuki Takezaki, Yuichiro Hama, Yuki Yoshimura, Hun-ok Lim and Atsuo Takanishi, "Realization of Walking by FFT-based Online Pattern Generation," Proceedings of the 12th International Conference on Climbing and Walking Robots and the Support Technologies for MobileMachines, pp. 615-622, Istanbul, Turkey, September, 2009.
Przemyslaw Kryczka, Kosuke Nishikawa, Juri Shimizu, Kenji Hashimoto,Aiman
Musua M. Omar, Hideki Kondo, Kentaro Hattori, Yuki Takezaki,Hun-ok Lim,
Atsuo Takanishi, Keisuke Suga and Keisuke Kato,“Development of Disturbance
Force Generator for Humanoid Robots,” 日本ロボット学会第27回学術講演会予稿集,1S1-07,神奈川県,2009年9月.会予稿集,1S2-02,神奈川県,2009年9月.
Kenji Hashimoto, Hyun-jin Kang, Masashi Nakamura, Egidio Falotico,Hun-ok Lim, Atsuo Takanishi, Cecilia Laschi, Paolo Dario and Alain Berthoz, "Realization of Biped Walking on Soft Ground with Stabilization Control Based on Gait Analysis," Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.2064-2069, Vilamoura, Algarve, Portugal, October, 2012.
Aiman Musa M. Omer, Kenji Hashimoto, Hun-ok Lim, and Atsuo Takanishi."Initial Study of Bipedal Robot Locomotion Approach on Different GravityLevels ", 2011 IEEE/SICE International Symposium on System Integration (SI International 2011), pp. 802-807, Kyoto, Japan, December 2011.
Aiman Musa M. Omer, Hun-ok Lim, and Atsuo Takanishi." Simulation Study of a Bipedal Robot Jumping Motion Approach on Moon Gravity ", IEEE International Conference on Robotics and Biomimetics (Robio 2010), pp.218-222, Tianjin, China, December 2010.