これまでの研究
WABOT(WAseda roBOT)シリーズ
加藤研究室で開発した人間型知能ロボットWABOTシリーズをご紹介します.
 |
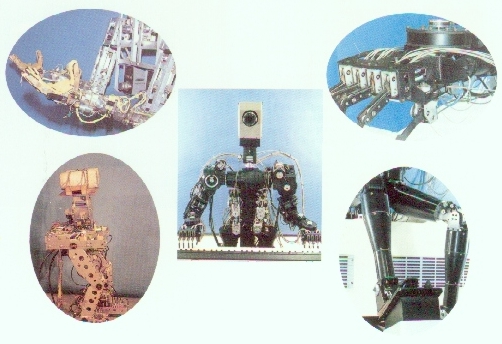
WABOT-1は昭和48年に完成した世界初の本格的人間型知能ロボットであり,手足システム,視覚システム,音声システムから構成されています.
|
WL(Waseda Leg)シリーズ
加藤・高西研究室2足班で開発した2足歩行ロボットWLシリーズをご紹介します.
 |
生体下肢部の歩行機構および機能に着目してその基礎データを解析し,下肢部のモデル化を試み人工の足モデル(膝,踵,足先の3関節を持つ大腿部以下の片足モデル)を設計製作しました.実験の結果,歩行の動作の基本的なメカニズムを確認しました(1967年). |
 |
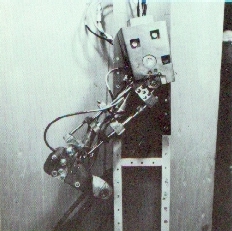
複動型シリンダを電気油圧サーボ方式で制御する操縦型モデルWL-3を設計製作し人間の遊脚相および立脚相動作,さらに2足で直行および座位状態保持を実現しました(1969年).両足で8自由度を持つ2足モデルです. |
 |
上体に重心移動の自由度を持ち,30kgまでの負荷を搭載し,さらに制御装置としてミニコンピュータを用いたWL-5を製作し,プログラム制御により自動2足歩行および方向転換を実現しました.片足5,上体1の合計11自由度の2足モデルで歩幅0.17[m],一歩40[s]で静歩行,方向転換15[deg]の転換を40[s]で行うことが可能です.これはWABOT-1の下半身に用いられました(1971年). |
 |
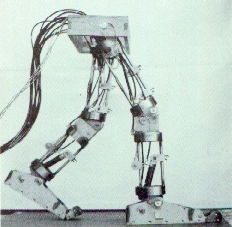
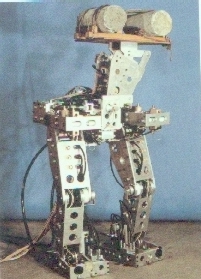
制御装置をミニコンから16ビット・マイコンに改め,数学モデルの解析を用意にするために足底接地点を3点から4点にしたWL-9DRを製作しました.上体の自由度をなくした片足の足首2,膝1,股2,両脚2の合計10自由度の2足モデルです.設定歩行パターンを用いて世界で始めて一歩10[s],歩幅0.45[m]の準動歩行を実現しました(1980年). |
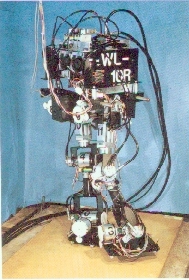 |
制御装置を搭載し,構造部材にCFRPを採用し,アクチュエータとしてRSAを用いた機械モデルWL-10号機の股部ヨー軸にRAとサーボ弁を用いた自由度を加えて,新モデルWL-10Rを開発しました.WL-9DRと同様の自由度の2足モデルで一歩4.4[s],歩幅0.4[m]の準動歩行が可能です.本モデルにより,これまでの準動直進歩行に静歩行ではあるが後退,左右側方歩行さらに左右転回を加えた面歩行を実現しました(1983年). |
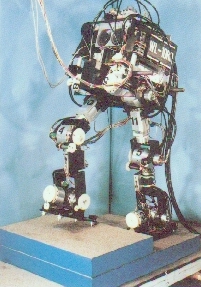 |
斜面や階段の動的昇降を行うことのできる2足歩行ロボットの開発を行いました.大腿部に転回用の自由度を追加した12自由度の2足モデルで膝,大腿部を除く8自由度に対してトルク制御を行い,一歩1.5[s],歩幅0.4[m]の動歩行が可能です.水平平坦路のための動的制御方式をもとに,基本歩行パターンおよび歩行パラメータを路面の傾斜角に合わせて補正することで,一歩2〜5秒の斜面および階段歩行を実現しました(1985年). |
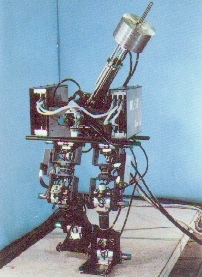 |
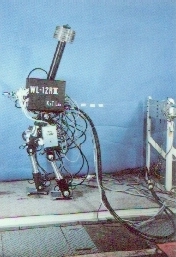
路面の凹凸や移動する障害物に対応するために,上体を歩容安定化の機構として利用する新2足歩行ロボットWL-12を開発しました.下肢はピッチのみの6自由度,上体はロール,ピッチおよび並進の3自由度の2足モデルです.下肢の軌道およびZMP軌道をそれぞれ任意に与えても,これを動的に補償する上体軌道を生成するアルゴリズムを考案しました.これにより,歩幅30cmで一歩2.6秒の動歩行を実現しました(1986年). |
 |
上体を有する2足歩行ロボットにおいて,未知の外力が加わっても上体と下肢の協調運動により歩行の安定化を図る歩行制御方式を開発しました.下肢はピッチのみの6自由度,上体はロールおよびピッチの2自由度の2足モデルで,一歩1.6[s],歩幅0.3[m]の動歩行が可能です.未知外力を上体の運動により補償し,その上体運動に応じて着地位置を変更することで上体軌道の収束を図る計算アルゴリズムを考案しました.上体および下肢の軌道計算をリアルタイムで行う制御装置を開発し,大きさ100Nで時間幅0.3秒の矩形状の外力において一歩0.64秒の動的足踏み状態を実現しました(1989年).
|
WABIAN(WAseda BIpedal humANoid)シリーズ
高西研究室2足班で開発した2足歩行ロボットWABIANシリーズをご紹介します.
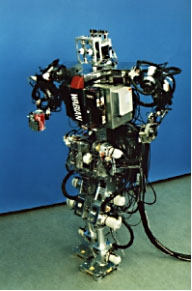 |
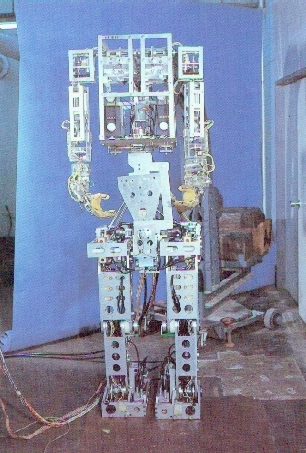
1996年,視聴覚情報取得機構を有する頭部,胴体および腕部を持つ人間型ヒューマノイドロボットWABIANを開発しました.片足3自由度,体幹3自由度,片腕7自由度,片手3自由度,首2自由度および片目2自由度の合計35自由度の人型モデルで,一歩1.28[s],歩幅0.10[m]の動歩行が可能です.上肢関節固定による動歩行,手先一定条件下で双腕による動的荷物運搬作業,人間が振る指揮棒のリズムに合わせての可変速ダンス,人間とのジェスチャー交換,ISDN回線を用いた遠隔操作などを実現しました. |
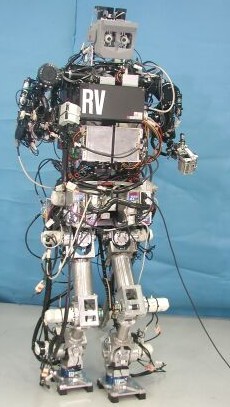 |
1997年,WABIANの改良により,多様な全身運動を可能にしたWABIAN-Rを開発しました.翌1998年には,視覚情報および床反力を取得可能にしたWABIAN-RIIを開発し,体幹関節,首関節などの冗長な自由度を利用することで,「嬉しさ」,「悲しみ」,「怒り」の表現を伴う歩行を実現しました.1999年には足底の改良により,多様な歩行が可能であるWABIAN-RIIIを開発しました.さらにコンプライアンス制御を行うことで,不整地路面に対応しました.2000年には,環境への順応性を向上させるため,毎歩毎にパターンを生成・出力することにより様々な歩行運動を可能とするオンラインパターン生成方式を考案しました.この方式を用い,視覚,音声入力を基に継続的な人間への追従運動をWABIAN-RIVにて実現しました.
|