�Q�����R���[�^��
WL-16RV
Waseda Leg - No.16 Refined V

WL-16RV�T�v
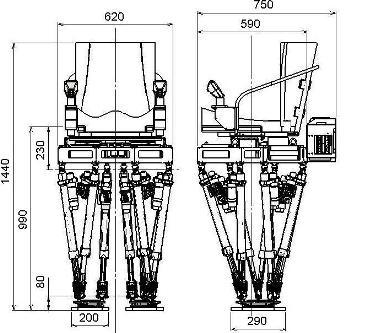
WL-16RV�́C�r�@�\�ɃX�`�����[�g�v���b�g�z�[���^�p���������J�j�Y�����̗p���Ă���C�p���������J�j�Y���̍��o�͂����C�l�╨���悹�ĕ��s���s�����Ƃ��ł��܂��D��{�\������ѕ��s���������WL-16�Ɠ��l�ł��̂ŁC���������������������D
WL-16RV�̎d�l�͈ȉ��̂悤�ɂȂ��Ă���܂��D
 |
 |
| �����@�E�d�� | |
| �S�� [mm] | 1431 |
| �d��(�o�b�e������) [kg] | 61 |
| ���d�� [kg] | 75 |
| ���@�\ | |
| �����N�`�� | �X�`�����[�g�v���b�g�t�H�[�� |
| ���R�x | �Ћr6 �~ ���r = 12 |
| ���A�N�`���G�[�^ | |
| �����@ | DC�T�[�{���[�^ �~ 8 AC�T�[�{���[�^ �~ 4 |
| ��i�o�� [W] | 150(DC) 200(AC) |
| ���R���s���[�^�E�d�� | |
| CPU | Pentium�V 1.2[GHz] |
| �o�b�e�� | ���`�E���C�I���o�b�e�� |
| �Z���T�� | �@�E 6���͊o�Z���T �~ 3 �@�E 3���p���p�Z���T �~ 1 �@�E ���[�^���G���R�[�_ �~ 12 �@�E �t�H�g�}�C�N���Z���T �~ 12 |
| �����\ | |
| ���s���� [s/step] | 0.8 �` 2.0 |
| ���� [mm/step] | 0�`300 |
| ���d�� [kg] | 70 |
��TOP�֖߂�
�ғ����Ԃ̌��� -���[�^��p�@�\�̊J������у��[�^�̕ύX-
�P�D�����ړI
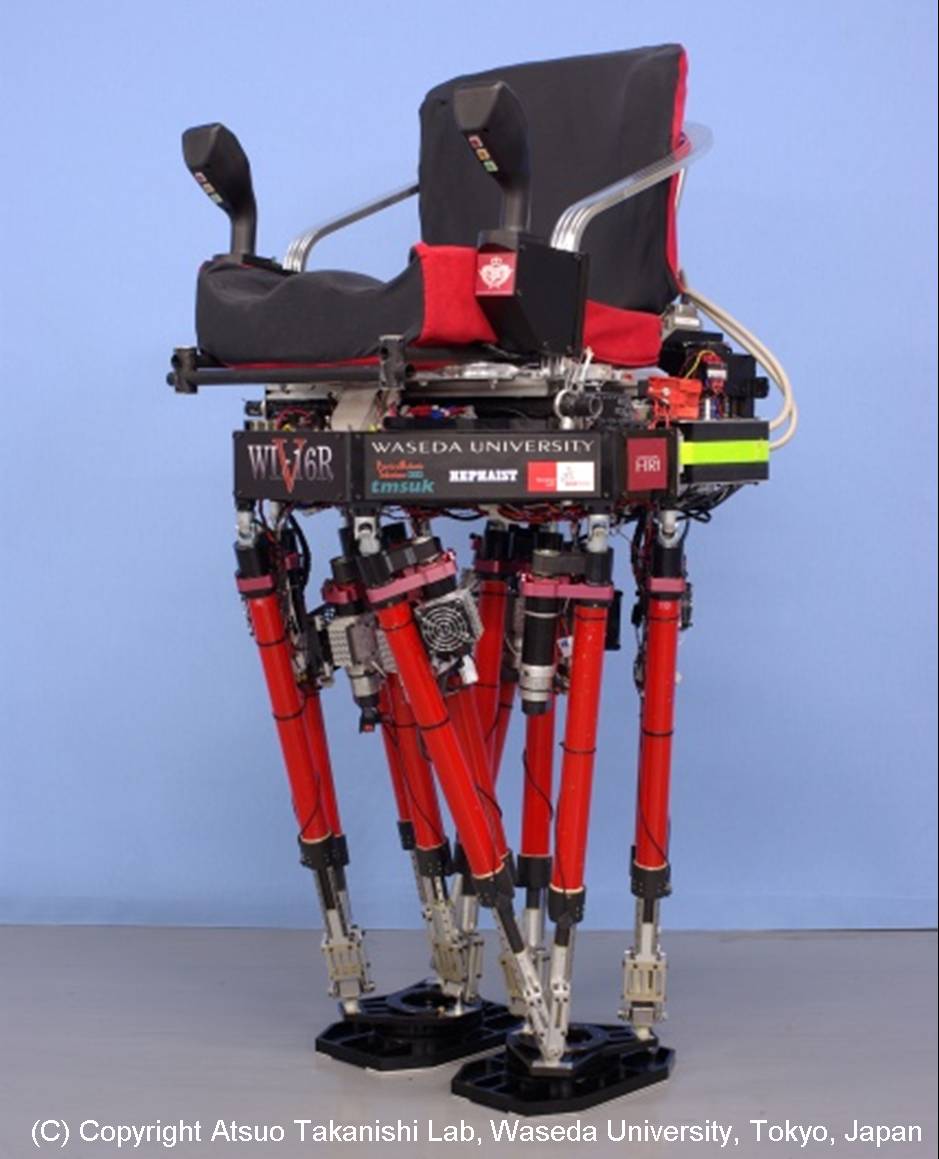
2006�N�x�ɊJ�����ꂽ�l�ԓ���^�Q�����s���{�b�gWL-16RIV�́C�ϋv���̌���Ɛύډd�̌�����͂��������Ƃɂ��80kg�̂������ύڂ��Ă̕��s�C�����75kg�̐��l�j�����悹�Ă̕��s�ɐ������܂����D�������Ȃ���C�ғ����Ԃ��o�b�e���[�̗e�ʂł͂Ȃ����[�^�̔��M�ɂ���Đ�������Ă����̂ŁC���M��}�����邱�Ƃʼnғ����Ԃ̌�����͂��邽�߂Ƀ��[�^��p�@�\�̊J�����s���܂����D�������C��p�����ł͔��M��}������Ȃ��������߂ɔ��M�̑傫���ӏ��Ɋւ��Ă̓��[�^�̕ύX���s���܂����D
 |
|
Fig .1 �����N�z�u |
�Q�D���[�^��p�@�\
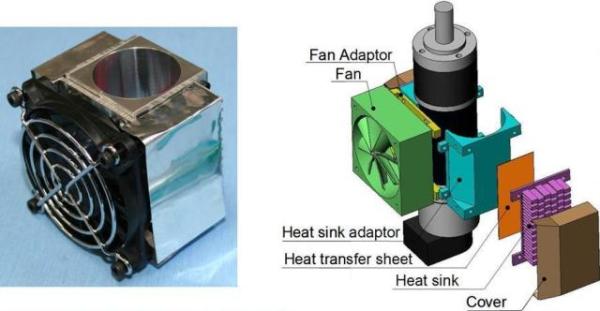
��p���@�Ƃ��ẮC�V�[�g�V���N�C�t�@���C�q�[�g�p�C�v�C�y���`�F�f�q�C����Ȃǂ��������܂��D�Q�����s���{�b�g�Ɏg�p����Ƃ������ƂŁC�y�ʁC�ȓd�͂ł��邱�Ƃ��d�����C�t�@���ƃq�[�g�V���N�p���邱�Ƃɂ��܂����D
 |
|
Fig .2 ���[�^��p�@�\�i�O�ς���ѕ���}�j |
�R�D�]�������@
���{�b�g��p���ė�p�������s���ۂɃ��{�b�g��H�ʂ̃��f���덷�̉e���ɂ������̍Č���������ꂸ�C���[�^��p�@�\�̕]�����ł��Ȃ����Ƃ��z�肳��܂����̂ŁC���{�b�g�Ŏ��ۂɎg�p����Ă��钼���A�N�`���G�[�^��p���ĕ]�������@�삷�邱�Ƃɂ�肱�̖��ɑΏ����邱�ƂƂ��܂����D
|
�]�������@����l�q (�d��30kg�F�K�i����60�`70kg�����̕���) |
�S�D���[�^�̕ύX
�]�������@��p����DC���[�^�̗�p�������s���Ă������ۂɁC���[�^�̃n�E�W���O�̉��x�͗}�����Ă��������[�^�̊������Ă��Ă��܂��Ƃ��������Ƃ��N���܂����D����́CDC���[�^�̏ꍇ���[�^�����ƃn�E�W���O�̊Ԃɂ͂����Ԃ����邱�Ƃɂ���C�Ƃ����f�M�w�����邽�߂ɋN�����̂��ƍl�����܂����D���[�^�̎d�l�Ŋ����̋��e���x��155�����Ƃ킩���Ă���̂Ńn�E�W���O�ƃ��[�^�����̉��x����100���ȏ�ł������ƍl�����܂��DDC���[�^���Ɨ�p�����Ă����M��}�������邱�Ƃ�����ƍl����ꂽ���߁C���M���傫���ӏ��̃��[�^�Ɋւ��Ă̓u���V���X���[�^�ɕύX���邱�Ƃɂ��܂����D
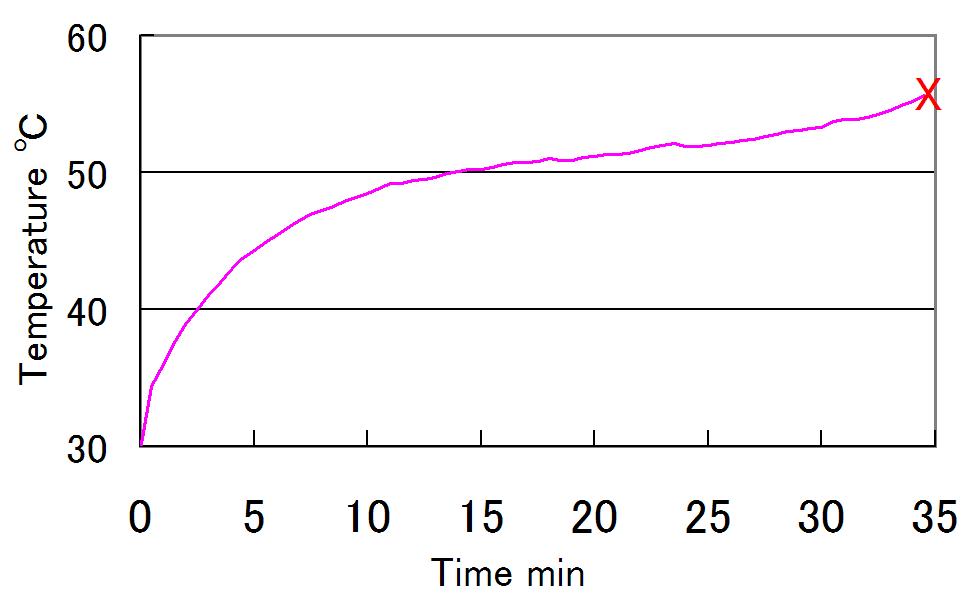 |
|
Fig .3 ���[�^�\�ʉ��x�̐��� |
�T�D�M���̉�̓\�t�g�ɂ��t�@���̑I��
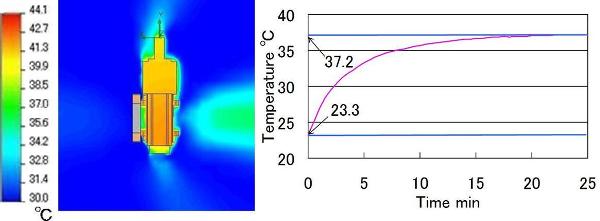
�t�@���̑I��͔M���̉�̓\�t�g��COSMOSFloWorks��p���čs���܂����DFig.4�̍����V�~�����[�V�������ʁC�E���]�������@�ɂė�p�������s�������ʂƂȂ��Ă���܂��D���[�^�̉��x�㏸����14�����x�ƂقڃV�����[�V�����ǂ���̌��ʂ�����ꂽ�̂ł��̎��Ɏg�p���Ă����t�@�����̗p���邱�Ƃɒv���܂����D
 |
|
Fig .4 �V�~�����[�V�������ʁi�������x�F30���C�ő剷�x�F43.9���j |
�U�D�]������
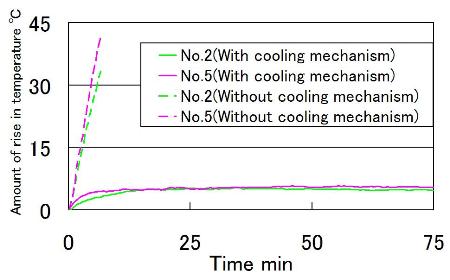
��p�@�\��t����WL-16RV�ɍő�ύڏd�ʂł���70kg�̂�������ڂ��Ă��̏ꑫ���݂������ė�p�������s�������ʁC���[�^�̉��x�㏸���͖�5�����x�ɂ����܂�܂����DFig.5�ɂ̓��[�^��p�@�\���g�p���Ă��Ȃ�����WL-16RIV�ɂčő�ύڏd��80kg���ڂ��ē��������s�����ۂ̎������ʂ���r�Ƃ��čڂ��Ă���܂��D
 |
|
Fig .5 ���[�^��p�@�\�̗L���̔�r�i����p�@�\�L�F70kg�C��p�@�\���F80kg�j |
��TOP�֖߂�
���n�Ռ��ɘa��ڎw�����s���H�ʓK������
(���n�Ռ��ɘa�s���n�H�ʓK������)
�P�D�����ړI
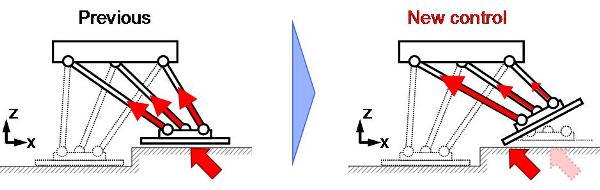
���n�O���C������̎g�p���ɂ����ĘH�ʂւ̂Ȃ炢����̍ۂɑ傫�Ȓ��n�Ռ����������Ă��܂��Ƃ�����肪����܂����D����̌����Ƃ��Ă͑��捂�������̋O���C�����Z�����s�����ł͕s���S�ł��邱�Ƃ��グ���C�p���I�ɕ��s���萫�Ɉ��e����^����ƍl�����܂��D�����Ŗ{�����ł͕s���H�ʕ��s���ɂ����钅�n�Ռ��ɘa��ڕW�Ƃ��C�܂����n�Ռ��ɘa��ڎw�������s�p�^�[���̐����@�C�����āC���n�Ռ��ɘa��ڎw�����V���ȕs���H�ʓK������̊J����ړI�ƒv���܂����D�{��@�͈ȉ��̂T�̃|�C���g����Ȃ�܂��D
|
|
���H�ʂ�z�肵�����捂���̍ŏI���B�ʒu�C������ |
|
|
�ʒu�Q�C����\���I�ɕύX���邱�Ƃɂ��r���R���v���C�A���X�̐��� |
|
|
���n���ɂ����鑫�摬�x���� |
|
|
Roll�CPitch�����ւ̂Ȃ炢���� |
|
|
1�����Ƃ̊���s�p�^�[���ւ̕��A���� |
|
| ���H�ʂ�z�肵�����捂���̍ŏI���B�ʒu�C������ |
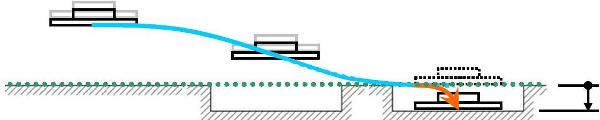
���n�O���C�������ł͂��̎�@����C���n�ʒu�����H�ʂł���Ɣ��f�ł���̂͗V�r����̏I���ԍۂŁC�c���ꂽ�ɋ͂��Ȏ��Ԃʼn��H�ʂɓK������ɂ́C�}���ɑ��摬�x��H�ʕ����ɑ������Ȃ���Ȃ�Ȃ����ߒ��n�Ռ����傫���������Ă��܂����D �����ŁC���E�ʗ��H�ʂɑ��ē����ɂȂ炦���@�Ƃ��āC���捂���̍ŏI���B�ʒu����s�p�^�[���Œ�߂�ꂽ��ʂ��������ɐݒ肷�邱�ƂŁC���H�ʂɂ��Ή����邱�Ƃɂ��܂���

|
| (a) ���n�p�^�[���C�����@ |
|
|
(b)
�Ռ��ɘa��}�����V�����H�ʓK������ Fig .6 ���H�ʂւ̓K�� |
|
| �ʒu�Q�C����\���I�ɕύX���邱�Ƃɂ��r���R���v���C�A���X�̐��� |
�R���v���C�A���X��V�r���ɂ����Ĕ\���I�Ɉʒu�Q�C����ጸ�����������̃R���v���C�A���X���グ�C����� �V�r����ɂ����āC����̐i�s���������グ�邱�ƂŒ��n���̏Ռ��̓x�N�g���Ƃ̓��ς���ԏ������Ȃ�A�N�`���G�[�^���ɏW���I�ɗ͂�������悤�ɒ��n���邱�Ƃɂ��C�傫�ȒǏ]�덷�������C����ɂ����đ傫�ȃR���v���C�A���X��������悤�ɂ��܂���.
|
| Fig .7 �r���@�\���l�������ۂ̒��n�Ռ��̊ɘa |
|
|
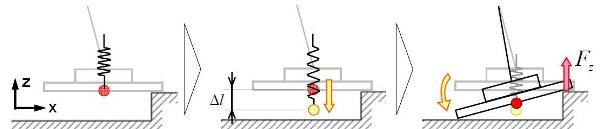
���n���ɂ����鑫�摬�x���� |
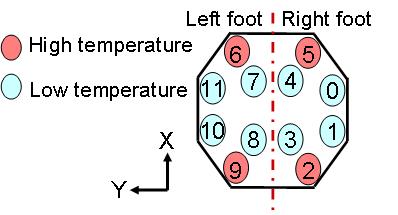
����6���̓Z���T�ɂđ��肳���͂̔����l�̗����オ��ɂ�蒅�n�����m���C�^���ʕۑ����ɏ]���C���摬�x��0�ɂ��邱�ƂŁD�t�B�[�h�o�b�N�I�ɏՌ��ɘa��}��܂����D�͂̔����l��p���邱�Ƃɂ�葁�}�Ȓ��n���m���\�ŁC�Z���T�h���t�g���ł���Ƃ�������������܂��D
|
| Roll�CPitch�����ւ̂Ȃ炢���� |
��L�܂ł̕��@�݂̂ł́C���n���ɂ�����Ռ����ɘa�͍s���Ă��C���������ʒu���i���x���O�ɂ��邱�Ƃɂ��j�Œ肵�Ă��܂��Ă��邽�߁CRoll�CPitch�����ւ̂Ȃ炢������s�����Ƃ͂ł��܂���D�����ŁC���n���m��ɂȂ炢������s�����߁C�r���ɉ��z�ˎ��R���̍������������z�R���v���C�A���X�������,�����H�ʂɑ��Ĉ��̉d�ʼn����t���C�����������[�����g�𗘗p����roll�CPitch�����ɃR���v���C�A���X���䎮�����Ă�邱�ƂłȂ炢��������������܂����D
|
| Fig .8 ���z�o�l�����l�����邱�Ƃɂ��Roll��Pitch�ɂ�����R���v���C�A���X�ړ��� |
|
|
1�����Ƃ̊���s�p�^�[���ւ̕��A���� |
�ȏ�q�ׂ����n�O���C���͗V�r���̌㔼�ɍs���Cz�����Ɋւ��Ă͗��r�x�����͗V�r���Ō�̋O���C���ʂ�ێ����P�r�x�����O���Ɋ���s�p�^�[���ɕ��A���܂��DRoll�CPitch���Ɋւ��Ă͗��r����ʂ��ėV�r���Ō�̃R���v���C�A���X�ړ��ʂ�ێ����C���̗V�r���O���Ɋ���s�p�^�[���ɕ��A���܂��D
TOP�֖߂�2.�����f��
�@���n�Ռ��ɘa�s���n�H�ʓK������ɂ��C���n�Ռ����ɘa�����Ď��������̋[���s���n�ɂ�������s�����C����ю����̍⓹�ɂ�������s�������s���܂����D
|
�s���n���s���� ������3�`20[mm]�ł���~�Ղ���є�z�u�����s���n �H�ʂɂ����Ă̕��s�����̉f���ł��D ���s�����F1.0�@[sec/step] �����F200 [mm] |
|
���O���s���� �X����7�x����⓹�ɂ����Ă̕��s�����̉f���ł��D ���s�����F2.0�@[sec/step] �����F200 [mm] �X�F7 [deg] |
����҂̊O���ɑ���⏞����i���I�O���⏞����j
�P�D�����ړI
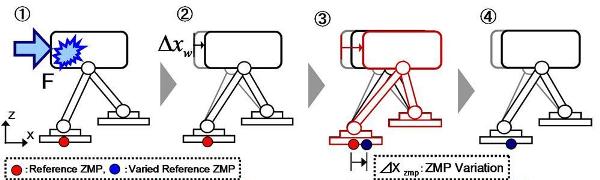
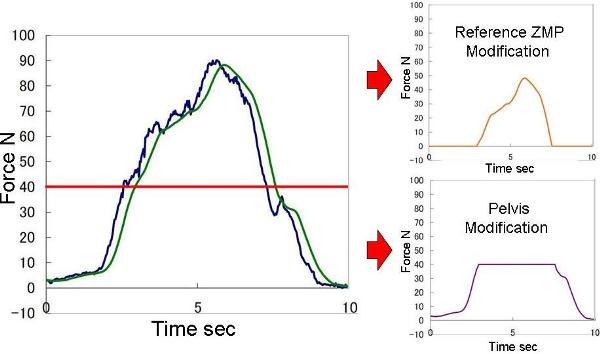
����҂��\���I�ɔ��������r�G�傫�Ȗ��m�̊O�����^�[�Q�b�g�Ƃ��C����ɑΉ��ł��郊�A���^�C���O���⏞����A���S���Y���̍l�Ă�ڎw���܂����D����҂���������O���͓���ȉ����ɓ��ڂ��ꂽ�U���͊o�Z���T��p���Č��o���܂��D�{����A���S���Y���́C�����⏞�O���̎Z�o�C�ݒ�ZMP�̕ύX�C���n�ʒu�̕ύX�̂R�����ɍ\������Ă��܂��D
|
|
�����⏞�O���̎Z�o |
|
|
�ݒ�ZMP�O���̕ύX |
|
|
���n�ʒu�̕ύX |
|
|
�����⏞�O���̎Z�o |
���s���Ƀ��{�b�g�ɊO������������ہC���{�b�g���]�|���Ȃ��悤�ɂ��邽�߁C����ZMP����ɏC�������ݒ�ZMP�Ɉ�v������悤�ɍ��������������邱�ƂƂ��܂����D���f���͓���҂��܂߂��������_���C�����d�S�ꎿ�_�ɏW������R���_�ߎ����f���Ƃ��C���{�b�g�ɑ���O�����m�́C�U���͊o�Z���T��p���čs�����ƂƂ��܂����D ����������ɂ����鍘���⏞�O���̎Z�o�Ɋւ��ẮC���܂���͏����l���̉��ƂȂ�C�K�����U���ƂȂ��Ă��܂��̂Őݒ�ZMP�̒l�𑀍삷�邱�ƂŔ��U�̗}�����s�����D

|
| Fig .9 3���_���f�� |
|
| �ݒ�ZMP�O���̕ύX |
�ݒ�ZMP�̕ύX�ʂ͍����O���̐ݒ�p�^�[������̕��ɔ��Q�C�����悶�ċ��߂܂��D�ύX���ꂽ�ݒ�ZMP����ɕ⏞�O�������邱�ƂŁC���O���̔��U��x���܂��͎�����������ʂ����܂�܂��D
|
| Fig .10 �ݒ�ZMP�̕ύX |
|
| ���n�ʒu�̕ύX |
�ݒ�ZMP�O���̕ύX�ɂ�荘���O��������������Ȃ��ꍇ�C���n�ʒu�̕ύX�ɂ��C�ݒ�ZMP��ύX�ł���͈͂U���Ă��������ɍL���邱�Ƃ��ł��܂��D���n�ʒu�ύX�ʂ̎Z�o�ɂ́C�ꎿ�_�ߎ����f����p���邱�ƂƂ��܂����D
.jpg)
|
| Fig .11 1���_���f�� |
2.�����f��
�@���I�O���⏞����ɂ��C�ύڏd�ʂ��Ȃ��ꍇ�ɂ�����i�s�����Ɖ���������̈�����ɂ��O�������C����ѐl�ԓ��掞�ɂ�����i�s��������̈�����ɂ�����O�������ɐ����������܂����D
|
�O�������i�i�s�����j �i�s�����ɐl���u�ԓI�Ɉ��������ꍇ�̊O�������̉f���ł��D ���s�����F1.0�@[sec/step] ���̏ꑫ���� |
|
�O�������i�������j �������ɐl���u�ԓI�Ɉ��������ꍇ�̊O�������̉f���ł��D ���s�����F1.0�@[sec/step] ���̏ꑫ���� |
|
�l�ԓ��掞�ɂ�����O������ �l�ԓ��掞�ɂ����Đi�s�����ɐl���u�ԓI�Ɉ��������ꍇ�̊O�������̉f���ł��D ���s�����F1.0�@[sec/step] �����F200 [mm] |
��TOP�֖߂�
����҂̊O���ɑ���⏞����i�ÓI�O���⏞����j
�P�D�����ړI
�{�����ɂ����Ă�����܂łɗl�X�ȊO���⏞���䂪�l�Ă���Ă��Ă��邪�C�����I�ɑ傫�ȗ͂ɑΉ��ł��邪�C���I�ȗ͂ɑ��Ă͑Ή��ł��܂���C�܂��́C�u�ԓI�ȗ͂ɑ��Ă͑Ή��ł��邪�C�����I�ȊO�͂ɂ͑Ή��ł��Ȃ��ȂǁC�ǂ̐���������b�g�E�f�����b�g������܂����D
�����ŁC�����̈Ⴄ��������܂��g�ݍ��킹�邱�Ƃɂ���āC��蕝�L���O�֑͂Ή��ł��鐧������̊m����ڎw���܂����D
�@�{����A���S���Y���́C�����C���ʂ̎Z�o�C�O�͂̐ݒ�l�̓��o�C�ݒ�ZMP�̕ύX�ɂ�鍘���ψʗʂ̒ጸ�̂R�����ɍ\������Ă��܂��D
|
|
�����C���ʂ̎Z�o |
|
|
�O�͂̐ݒ�l�̓��o |
|
|
�ݒ�ZMP�̕ύX�ɂ�鍘���ψʗʂ̒ጸ |
|
| �����C���ʂ̎Z�o |
����҂ɂ���ĊO�͂�������ꂽ�ꍇ�CZMP�̕ψʗʂ������܂��D���̂Ƃ��C������P���ɐ����Ɉړ������邱�Ƃɂ����ZMP�����̈ʒu�ɖ߂�悤�ɍ����̏C�����s���܂��D���̍ۂɁC���f���Ƃ��Ă�Fig.9�̂R���_���f����p���܂����D
|
| �O�͂̐ݒ�l�̓��o |
����6���͊o�Z���T�ɂ���đ��肵������҂̊O��(F)�͐U���I�ɂȂ��Ă���C���̒l�����̂܂ܗp����ƃ��{�b�g�̏C���ʂ��U���I�ɂȂ��Ă��܂��C���s���s����ɂȂ��Ă��܂��܂��D�����ŁC�����O�͂̕��ϒl�����݂̖ڕW�l(Ftag)�Ƃ��C����ɍ����ɑ傫�ȉ����x���������Ă��܂��ƁC�����͂̉e���ɂ����s���s����ɂȂ��Ă��܂��̂ŁC�����̑��x�E�����x�ɐ�����݂����Ƃɂ��O�̖͂ڕW�l(Fmodif)�̐ݒ���s���܂����D
|
| Fig .12 �O�͂̏C�� |
|
| �ݒ�ZMP�̕ύX�ɂ�鍘���ψʗʂ̒ጸ |
��L�̐���͐ÓI�O���⏞�ł��邽�߁C�Ⴆ�Ή�����Ă����O�͂��}�ɂȂ��Ȃ�ƁC�����ʒu���O�͂��������Ă��Ȃ��Ƃ���܂Ŗ߂��܂ł̊ԁC�t�ɐÓI�Ȃ荇��������C�O�͂�������Ă��Ȃ��ɂ�������炸���s���s����ɂȂ��Ă��܂��܂��D �����ŁC����傫���܂ł̊O�͂ɑ��ẮC�������_�̈ʒu��ύX�����C�ݒ�ZMP�̕ύX�݂̂őΉ����邱�ƂƂ��܂��D�Ȃ��C�ݒ�ZMP�̕ύX�őΉ��ł��Ȃ������O�͐����Ɋւ��Ă͂���܂łɐ������������C���ɂ�郂�[�����g�⏞���s�����̂Ƃ��܂��D
|
| Fig .13 �O���̐蕪�� |
2.�����f��
�@�ÓI�O���⏞����ɂ��C�i�s��������̘A������������ɂ��O��������Ԃɂ�������s�C����у��A���^�C���O���⏞����Ƃ̓������������Ƃɂ�蓋��҂ɂ��O��������������Ԃł����肵�ĕ��s���邱�Ƃɐ����������܂����D ���{�b�g�ɂ̓��x�����[�^�����t�����Ă���C�P�̃��C�������肪10[N]��100[N]�܂ŕ\���ł��܂��D
|
�O�������i�i�s�����j �ÓI�O���⏞����݂̂����āC�i�s�����ɐl���A���I�Ɉ��������ꍇ�̊O�������̉f���ł��D ���s�����F1.0�@[sec/step] ���̏ꑫ���� |
|
����ҊO������ �ÓI�Ɠ��I�̊O���⏞��������Đi�s�����ɐl���A���I�Ɉ��������ꍇ�̊O�������̉f���ł��D ���s�����F1.0�@[sec/step] ���̏ꑫ���� |
|
����ҊO������ �ÓI�Ɠ��I�̊O���⏞��������Đi�s�����ɓ���҂��u�ԓI�ɊO����^�����ꍇ�̊O�������̉f���ł��D ���s�����F1.0�@[sec/step] �����F100 [mm] |
��TOP�֖߂�
�O��������̊O���ɑ���⏞����
�P�D�����ړI
����܂ŊJ�����Ă�������҂̊O����⏞���鐧�䂾���łȂ��C���{�b�g�O���̊�����̊O����⏞���鐧����J�����܂����D
���̐���͊O��������O������������ۂɁCZMP������O���̑傫���𐄒肵�C�⏞��������āC�O����⏞���܂��D
�@�@�@
�@�{����A���S���Y���́C�O�͂̐���C�����⏞�O���̎Z�o�C���n�ʒu�̕ύX�C�ݒ�ZMP�O���̕ύX�̂S�����ɍ\������Ă��܂��D
|
|
�O�͂̐��� |
|
|
�����⏞�O���̎Z�o |
|
|
���n�ʒu�̕ύX |
|
|
�ݒ�ZMP�O���̕ύX |
|
|
�O�͂̐��� |
���{�b�g�O���̊������������O���ɂ��Ă͑�����6 ���͊o�Z���T�Ō��o���C Fig.11�̂P���_���f���ɋߎ����āCZMP������d�S�ɂǂ̒��x�̗͂�������Ă��邩�𐄒肵�܂��D
|
|
�����⏞�O���̎Z�o |
���s���Ƀ��{�b�g�ɊO������������ہC���{�b�g�̓]�|��h�����߁C����ZMP�ƏC���ʂ���������ݒ�ZMP����v������悤�ɍ��������������܂��D �����⏞�O����Fig.9�̂悤�ȂR���_���f���ɋߎ�����ZMP����̃��[�����g�̂荇��������Z�o���܂��D �������C���߂���������U���Ă��܂����߁C��q�̒��n�ʒu�̕ύX�Ɛݒ�ZMP�̕ύX���s�����ƂŔ��U��}�����܂��D
|
|
���n�ʒu�̕ύX |
�����̒��n�ʒu��ύX���邱�ƂŁC�����O���̔��U��}�����邱�Ƃ��ł��܂��D ���n�ʒu�ύX�ʂ́CFig.11�̂悤�ȂP���_���f����p���ĎZ�o���܂��D
|
| �ݒ�ZMP�̕ύX |
�ݒ�ZMP�̕ύX�ʂ͍����O���̐ݒ�p�^�[������̕��ɔ��Q�C�����悶�ċ��߂܂��D Fig.10�̂悤�ɕύX���ꂽ�ݒ�ZMP����ɕ⏞�O�������邱�ƂŁC���O���̔��U��x���܂��͎�����������ʂ����܂�܂��D
TOP�֖߂�2.�����f��
���̏�ő����ݒ��̃��{�b�g�ɊO����^�����Ƃ���C�����ꂽ�����ɕ⏞�O�������邱�Ƃɐ������܂����D �܂��C�O�i���s���ɊO����^�����Ƃ���C�O���͂�������Ă���Ԃ͂��̏�ő����݂�����悤�ɒ��n�ʒu��ύX���C ����ȏ�O���̔������ɋ߂Â��Ȃ��悤�ȕ⏞�O�������邱�Ƃɐ������܂����D
|
�O�������i�i�s�����j �i�s�����ɐl�����{�b�g�̍������u�ԓI�ɉ�������C���I�ɗ͂������������ꍇ�̊O�������̉f���ł��D ���s�����F1.0�@[sec/step] ���̏ꑫ���� |
|
�l�ԓ��掞�ɂ�����O�����s�����i�i�s�����j �O�i���s���̃��{�b�g�ɐl�����{�b�g�̍����������悤�ɊO�͂��������ꍇ�̊O�������̉f���ł��D ���s�����F1.0�@[sec/step] �����F100 [mm] |
��TOP�֖߂�