|
WABIAN-2 (WAseda BIpedal humANiod-No.2) |
| ENGLISH/JAPANESE |
|
WABIAN-2 (WAseda BIpedal humANiod-No.2) |
| 1.概要 |
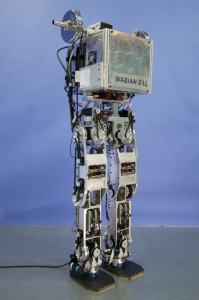
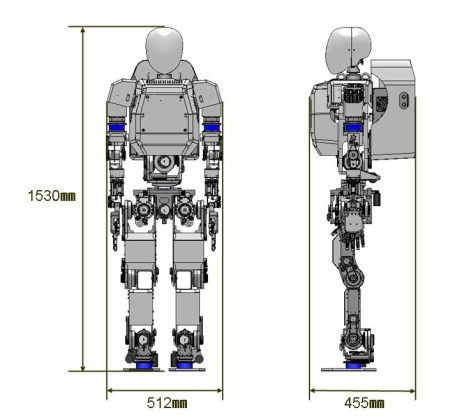
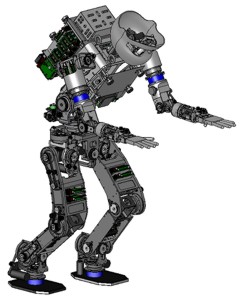
| これまでに開発された2足ヒューマノイドロボットWABIAN-2は,全長1530[mm],重量64.5[kg]であり,また人間が通常行う様々な運動の再現するために,従来開発されてきたロボットに対して,比較的人間に近いより多くの自由度構成を採っています. 現在までに,7自由度の脚部,2自由度の腰部,2自由度の体幹部,7自由度の腕部,3自由度の手部,3自由度の首部の計41自由度,およびそれらの制御部を開発しました.各リンク長さについては,外観の美的評価,人間との協調性を考慮し,最も美しいとされる比率を参考にしています.可動範囲は,リハビリテーション分野における人体運動測定の指標を参考にしました. |
 |
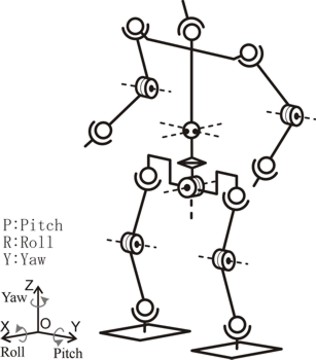 |
| Fig. 3 概略図 | Fig. 4 WABIAN-2 DOF |
| Table 1 WABIAN-2仕様 |
| 全高 | 1530[mm] | ||||||||||||||
| 重量 |
|
||||||||||||||
| 自由度 |
|
||||||||||||||
| センサ |
|
||||||||||||||
| アクチュエータ | DCサーボモータ | ||||||||||||||
| 減速機構 |
|
||||||||||||||
| バッテリ | ニッケル水素電池 |
|
 |
|
| Fig. 5 全体写真 | ||
| 画像をクリックすると別ウィンドウで開きます |
| ■制御システム |
| WABIAN-2は体幹部に搭載されたコンピュータにより制御されています.制御コンピュータはCPUボードと,各I/Oボードから成り,PCIバスを通して接続されています.I/OボードはD/Aを16ch,カウンタを16ch,PIOを16ch搭載したHRP Interface Boardと,6軸力覚センサレシーバボードとなっています.制御コンピュータに搭載しているOSはリアルタイムシステムである,QNXを採用しました. 各アクチュエータには回転角検出用にインクリメンタル式のエンコーダを搭載し,各ジョイント側には初期位置検出のためフォトセンサを搭載しています.また,足首には6軸力覚センサを床反力やZMPの計測のために搭載しています. |
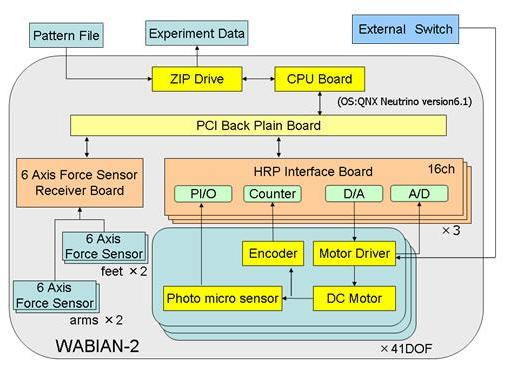 |
| Fig. 6 Control System |
| -ページトップへ- |
| 2.機構 |
| 2.1 WABIAN-2/LL |
| 2004年2月までに,人間の歩行を模擬するため,様々な運動が可能な2足ヒューマノイドロボットの下肢機構WABIAN-2/LLを開発し,腰の揺動を用いた膝関節の完全な伸展を伴う,膝関節伸展型歩行0.35[m/step],0.96[s/step]を実現しました. |
|
||||||||||
| 2.2 下肢機構について |
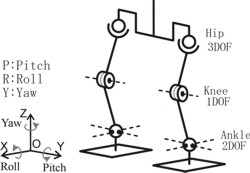
| 従来の2足歩行ロボットは,片足にそれぞれ6自由度を備えていました.しかし,人間はそれ以上の自由度を持ち,多様な歩行運動を実現しています. そこで私たちは,人間の定常歩行中に観察される腰の旋回運動と足関節の旋回自由度に注目し,より人間に近い歩行運動を追及しています. |
| 下肢の自由度配置 | ||
 |
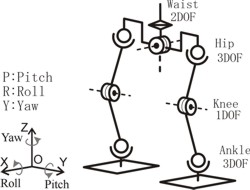 |
|
| Fig. 9 従来の2足歩行ロボット | Fig. 10 WABIAN-2 | |
| より人間らしい歩行運動を可能にする機構として,腰の2自由度(Roll,Yaw)があります. この自由度により,上体部の姿勢に依存しない腰の運動を有効に活用することで膝関節の伸展位(膝が伸びきった状態)を伴う歩行運動を実現しています. | 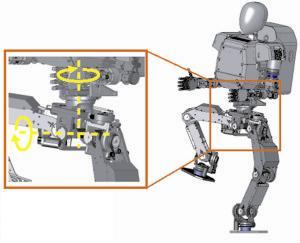 |
|
| Fig. 11 Waist DOF |
| 画像をクリックすると別ウィンドウで開きます |
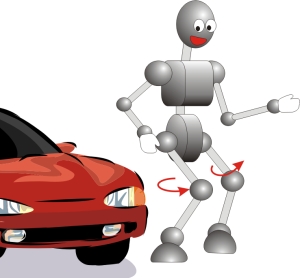 |
片足6自由度の場合,足先の位置・姿勢を決めてしまうと,各関節角度が一意的に決定されてしまいます. しかし,人間は冗長自由度を持ち,足先の位置・姿勢が決まっていても膝の旋回運動が可能です. 私たちはこれを使うことで,今まで足の踏み替えが必要であった状況において,膝を旋回することでスムーズな歩行が可能になると考えています. | |
| Fig. 12 Advantage of 9-DOF |
| 2.3 上肢機構について |
| 上肢・体幹部は,人間と一緒に物を運ぶ・踊る等のインタラクションや,人体運動シミュレータとして杖や歩行支援機を押して歩くなど,人間の運動をロボットが再現できる事を目標に設計されています. そこで,上肢機構の設計においては,ロボットが歩行支援機を使うことができることを目標としました. 自由度構成は,前屈・・・が可能な体幹 2 自由度,また,腕部は7自由度,手部3自由度,首部 3 自由度としました.各関節の可動角も人間とほぼ同様のそれを実現しました. |
 |
 |
|
| Fig. 13 歩行支援機を押す | Fig. 14 杖を突く |
| -ページトップへ- |
| 3.実験映像 |
| 画像をクリックすると実験映像を見ることができます |
|
|
| 4.愛・地球博(AICHI EXPO)への出展 |
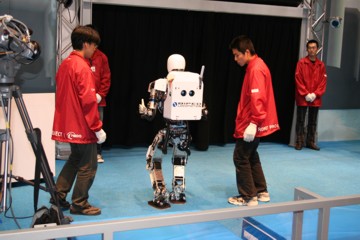
| 2005年6月9日〜19日に行われた愛・地球博(AICHI EXPO)でのイベント“プロトタイプロボット展”にWABIAN-2を出展しました. 本プロトタイプロボットロボット展では,WABIAN-2が可能にする腰部,体幹部の運動,また人間のような膝を伸ばした歩行等のデモンストレーションを行いました.また,一般的な2足歩行ロボットの歩き方である膝を曲げたままの歩行と,膝を伸ばした歩行の膝部のエネルギー消費をその場で測定し,グラフで表示することで,“膝を曲げたままよりも伸ばした歩行のほうが疲れが少ない”ということを観客の皆様にご覧頂きました. |
 |
 |
| ご挨拶 | WABIAN-2で特徴的な膝を伸ばした歩行 |
 |
 |
| 一般的な膝を曲げたままでの歩行 | 2種類の歩行における膝でのエネルギー消費の比較 |
 |
 |
| 片腕・片足の7自由度を活かした動き | 歩行支援機を押して歩く様子 |
| Fig. 19 Demonstration at AICHI EXPO | |
 |
愛・地球博デモ (WMV形式 197秒 23.3MB) *画像をクリックすると実験映像を見ることができます |
| -Page_TOP- |
| Takanishi Laboratory トップへ | Last Update 2005.12.27 Copyright(C) 2005 Biped Team/Takanishi Laboratory All Rights Reserved. |