|
WABIAN-2 (WAseda BIpedal humANiod-No.2) |
| ENGLISH/JAPANESE |
|
WABIAN-2 (WAseda BIpedal humANiod-No.2) |
| 1. Overview |
|
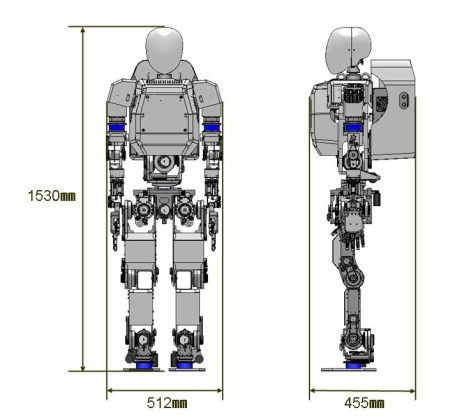
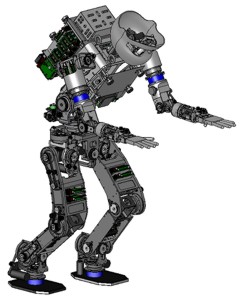
WABIAN-2 has been designed accordingly in order to develop a humanoid robot
with the height of 1500[mm], and the weight of 60[kg].
Below is the drawing and specification of WABIAN-2 |
 |
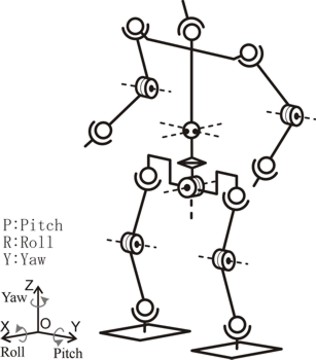 |
| Fig. 3 Drawing | Fig. 4 WABIAN-2 DOF |
| Table 1 Specification |
| Height | 1530[mm] | ||||||||||||||
| Weight |
|
||||||||||||||
| DOF |
|
||||||||||||||
| Sensors |
|
||||||||||||||
| Actuators | DC Servo Motor | ||||||||||||||
| Reduction Mechanism |
|
||||||||||||||
| Batteries | Ni-H Battery |
|
 |
|
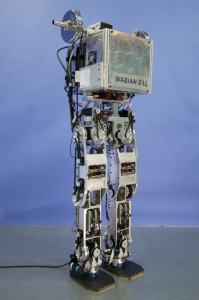
| Fig. 5 Photos | ||
| Click image to open in newr window |
| <Control System> WABIAN-2 is controlled by a computer mounted on its trunk. The control computer consists of a PCI CPU board , which is connected to I/O boards through PCI bus. For I/O boards, we used HRP Interface Board which has 16ch D/As, 16ch Counters and 16ch PIOs, and six axis force/torque sensor receiver board. Operating system installed on control computer is QNX, which is a real time system.Each Actuator system is equipped with an incremental encoder attached to the motor shaft, and a photo sensor attached to the joint shaft in order to detect the initial posture. (Also each ankle is equipped with a six axis force/torque sensor which is used to measure floor reaction force and ZMP.) |
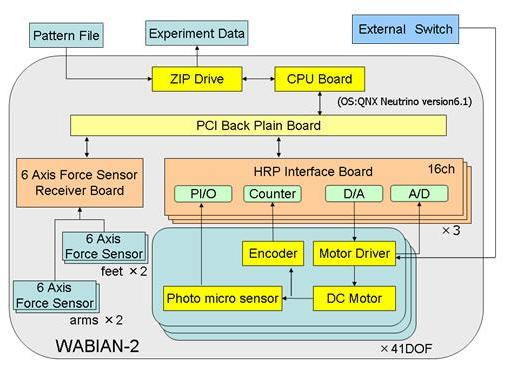 |
| Fig. 6 Control System |
| -Page_TOP- |
| 2. Mechanism |
2.1 WABIAN-2/LL (Lower Limb)
| Until February 2004, we developed lower limb mechanism of the bipedal humanoid
robot WABIAN-2. Using this robot, we achieved human-like walking which have knee stretched posture.(length of stride : 0.35[m/step], gait cycle : 0.96[s/step]) |
|
||||||||||
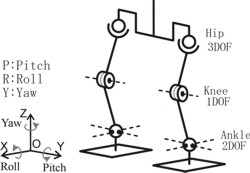
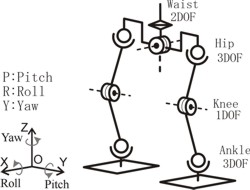
2.2 Mechanism of the Lower Body
| Conventional biped humanoid robot had 6-DOF in each leg. This is different with humans which have more DOF in each leg, and the ablility to realize various walking motions. Therefore, we concentrate on human's waist motions and the yaw motion of ankle joint, in order to realize more human-like walking motions. |
| DOF Configuration of the Lower Body | ||
 |
 |
|
| Fig. 9 DOF Configuration of Conventional humanoid robot(WABIAN) | Fig.10 DOF Configuration of WABIAN-2 |
|
| 2-DOF (Roll, Yaw) in waist part enables more human-like walking motions. This new mechanism has an advantage which allows this robot to walk with knee streched position due to the independent orientation of trunk movement. | 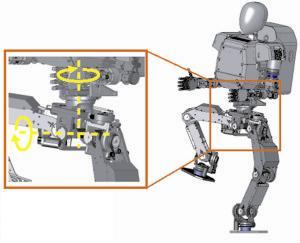 |
|
| Fig. 11 Waist DOF |
| Click image to open in new window |
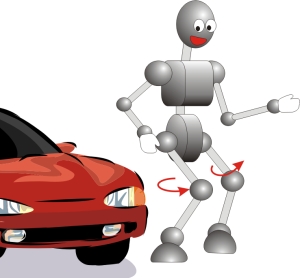 |
In case of conventional leg mechanism (6-DOF), predetermination of foot's position and orientation will decide each joint angle. However, humans have the ability to more their knees even if the position and orientation of foot are predetermined due to the redundant DOF. Therefore, we think that by having 7-DOF instead of 6-DOF robot will have the same ability as human to walk smoothly even needed changing step. | |
| Fig. 12 Advantage of 7-DOF leg mechanism |
3.3 Mechanism of the Upper Body
| The upper body was designed for the purpose of simulating various human
motions, for example, carrying something with human, dancing with human, pushing a walker,and attaching a cane (especially, using walk assist machine.). Upper body includes a 2-DOF trunk, two 7-DOF arms (each arm have more 3-DOF hand), and a 3-DOF neck. And, the movable range of wabian-2 covers human's one. |
 |
 |
|
| Fig. 13 Pushing a walker | Fig. 14 Attaching a cane |
| -Page_TOP- |
| 3. Experiments |
| Click images, to watich the experiment movies |
|
|
| -Page_TOP- |
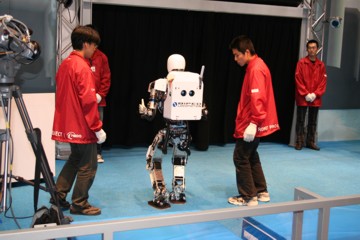
| We made a presentation at the event "PROTOTYPE ROBOT EXHIBITION" which had takn place in AICHI EXPO from June 9 to 19, 2005. In the event, we demonstrated WABIAN-2's movements of the waist and trunk, and walking with knees stretched like human. We measured energy consumption at the knee joints in conventional walking (walking with knees flexed) and walking with knees stretched, and compared them by a graph. We showed quantitative verification to the audience that we're less tired after walking with knees stretched than flexed. |
 |
 |
| Greeting | Walking with knees stretched |
 |
 |
| Conventional walking | Comparison of knee's energy consumption between the two kinds of walking |
 |
 |
| Movement of the elbows and knees by each 7-DOF | Walking with walker |
| Fig. 19 Demonstration at AICHI EXPO | |
 |
Demonstration at AICHI EXPO (WMV 197[sec] 23.3MB) *Click the image, to watich the experiment movies |
| -Page_TOP- |
| Takanishi Laboratory TOP | Last Update 2005.12.27 Copyright(C) 2005 Biped Team/Takanishi Laboratory All Rights Reserved. |