Tele-operation of an
omnidirectional mobile
base robot with force feedback
A
teleoperation system was developed at the Mechanical Engieering Laboratory (MEL)
to control an omni-directional wheeled mobile robot. In order to control the
robot; the inverse kinematics equations to calculate the motion of each wheel of
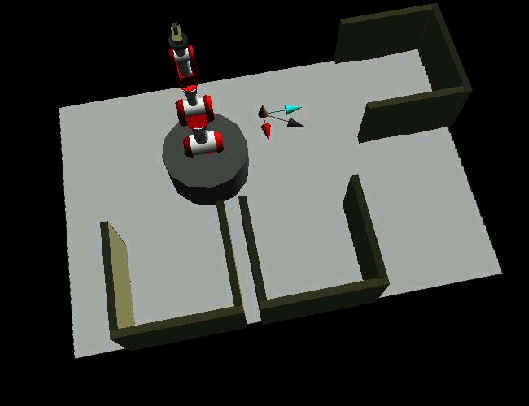
Mobile Robot were obtained. This motion is displayed in 3D Graphic Window that
simulates the behavior of the Mobile Robot in a virtual environment. Also a Force Field was created for avoid
collisions.
System Requirements
+ Hardware:
DA Board (12 bits).
Joystick & Phantom.
PC Computer (DELL: Windows 2000 & FreeBSD).
PC 486 Target (VxWorks 5.4).
Vodoo3 Graphic Accelerator Board.
+ Software:
GTK+
OpenGL
Linux Slackware (7.0)
VxWorks (5.4)
gcc compiler
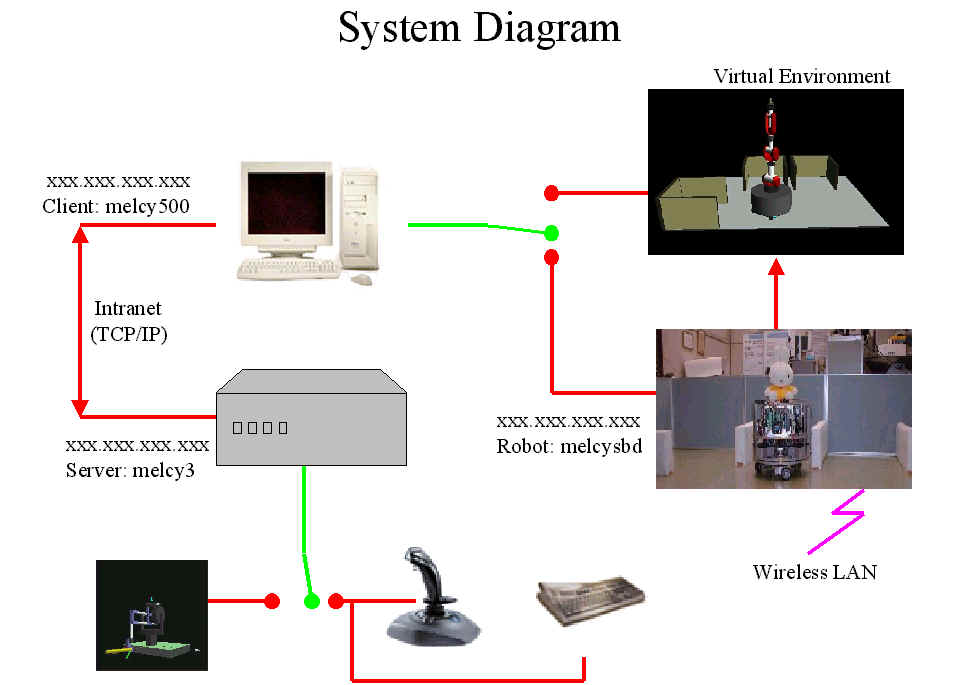
System Diagram
Simulation (Virtual Environment)
Every program in this system has a specific task into the simulation. These tasks are divided in:
1. Input device programs
2. Mathematical programs.
3. 3D Graphic programs.
4. Communication programs.
These programs share their information using a Shared Memory. This share memory has the following memory map:
Input Device programs
command.c: this program controls the simulation environment.
joystick.c: this program lets to control remotely the virtual environment or the mobile base robot using a joystick and keyboard inputs.
mouse.c: this program lets to control locally the virtual environment or the mobile base robot using a mouse.
pt.c: shows the information from the haptic device (phantom): pen stylus position, force feedback, etc.
display.c: displays the position of the mobile base's center.
Mathematical programs
ikin.c: This program computes the inverse kinematics of the mobile base robot. (s: steering motor, d: driving motor)
calculus.c: This program integrates the position and angles using Euler's method.
These pages are maintained by Jorge Solis