Tele-operation of an
omnidirectional mobile
base robot with force feedback
(3 DOF)
3D Graphic programs
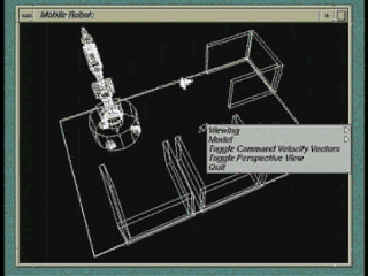
mobil_robot.c: This OpenGL program displays the mobile base robot motion in Real Time.
Communication programs
Jclient.c: This program sends from the PC target computer, the information from the joystick and board devices.
Pclient.c: This programs is a bidirectional communication (TC/IP) between the PC target computer and the haptic device (Phantom).
Rserver.c: This program sends directly the information to the real mobile base robot using TCP/IP. The mobile base has a Wireless LAN card.
Avoid Collisions
All virtual walls produce a force field around them. The system is checking the center body position. If the position of this center cross a virtual reference line, the system produce a proportional force feedback in an oppositive direction.
The force feedback is send by a haptic device to the operator. Also, when the robot is inside this area, the system controlls the mobile motion to avoid the collision.
These pages are maintained by Jorge Solis