|
The probe’s x axis movement is defined by median of x movements of all templates
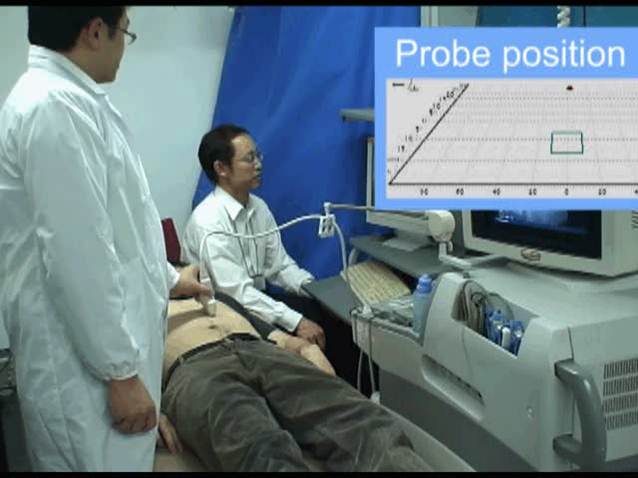
The graphical user interface guides the probe towards the right target area.
|
Position detection in x axis
|
GUI
|
3.Evaluation test
(1)Intrasession test
|
To evaluate the effectiveness and usability of the probe navigation algorithm by sonographers
i)Sonographer decides a target object (bifurcation of the vessel, etc)
ii)Scan and record 3D data including the target image
iii)Sonographer moves probe to the target area according to GUI
iv)If the goal image contains the target object, it is counted as “success”
Success rate was 17/18 cases.
|
Parameters
|
(2)Intersession test
|
The same experiment has been carried out with minimum 10 days between 3D data recording and probe navigation
Success rate was 2 out of 6cases. In one case the probe was close to the target but postone was wrong.
|
Click here to view the movie
GUI navigation
|
(3)Consideration
|
Proposed algorithm has been validated by in-vivo experiments. Intrasession experiment shows high success rate.
In order to increase success rate in intersession,
especially guiding probe in 3 rotational axes might be required.
|
4.Acknowledgment/Link
We would like to express our thanks to Prof. Saito of Tokyo Women's Medical Univ.,Prof. Sugawara of Himeji Dokkyo Univ., Prof. Niki of Tokyo City Univ. and Hitachi Aloka Medical,Ltd. for their daily suggestions and supports.
And also thanks to SolidWorks Corp., for their support of CAD software.
This study has been carried out under the permission of the Ethics Committee on Human Research of Waseda University.
|







 Tokyo City University
Tokyo City University Hitachi Aloka Medical,Ltd.
Hitachi Aloka Medical,Ltd. SolidWorks Corp.
SolidWorks Corp.