
|
|
|
肝臓領域の 自動走査制御系 システム |
|
|
| |
|
1.研究背景
2.肝臓超音波診断 3.システム構成 4.評価試験 5.謝辞・リンク |
研究業績
高西研ホーム |
1.研究背景
はじめに
本研究の目的
2.肝臓超音波診断
肝臓超音波診断
|
ロボットによる自動走査手順は一般的な肝臓超音波検査の専門書にしたがって作成した. |

肝臓走査手技
|
要求仕様
|
要求仕様を次の通り定義した. |

扇動走査
|
3.システム構成
概要
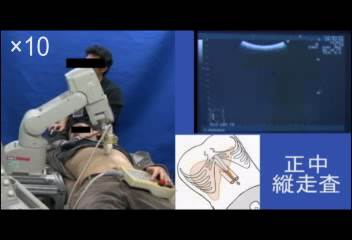
肝臓領域の自動走査制御系システムは,6自由度産業マニピュレータ,6軸力覚センサ,超音波診断装置,制御PCおよび画像キャプチャーボードから成り立っており,
その全体図,構成図は下記のようになっている.
走査手技のパターン設計により定められた4つの走査および扇動走査軌道がパターンジェネレータよりマニピュレータに与えられる.
皮膚からプローブへ加わる反力を,マニピュレータ先端に取り付けられた6軸力覚センサにより検知し,軌道を修正することによりプローブと体表の接触を押圧一定制御で保つ.
マニピュレータの先に取り付けられた超音波プローブにより取得された超音波診断画像はビデオキャプチャによりPCに取り込まれる.
走査の最中,超音波画像情報をもとにプローブの位置・姿勢補正(画像欠け補正)を行うことで常に医師が見て診断可能な画像の状態に保つ.


(1)走査手技のパターン設計
|
肝臓の各部位に応じた走査開始点を数点あらかじめ設定しておく.現在位置から走査開始点まで,関節角を線形補完することでプローブを移動する. |
||||||||||||||||||

走査手技
(2)押圧一定制御
呼吸による体表の変動や体表の凹凸の個人差にかかわらずプローブと体表の接触を保つ必要がある.
(3)画像欠け補正
プローブ端面の左端または右端が皮膚表面から浮いてしまうと,超音波画像の左端または右端に断層画像が現れず,その部分は黒く表示される.
4.評価試験(1)押圧一定制御評価
(2)性能評価試験
ⅰ)アンケート
フェーズを4つの走査に分け,それぞれにつき以下の評価項目を設け,検査者(医師1名,超音波技師2名)により評価を行った. 
評価結果
ⅱ)未確認肝臓領域
肝臓の模式図を用意し,実際の走査風景と取得した超音波画像より未確認の肝臓領域を検査者が図中に記入した. 
未確認肝臓領域
(3)考察
5.謝辞・リンク
共同研究者である東京女子医科大学の斉藤明子先生,姫路獨協大学の菅原基晃先生,東京都市大学の仁木清美先生,
日立アロカメディカル株式会社の皆様に感謝いたします.
| ||||||||||||||||||





 東京都市大学
東京都市大学 日立アロカメディカル株式会社
日立アロカメディカル株式会社 ソリッドワークス・ジャパン株式会社
ソリッドワークス・ジャパン株式会社