Dental Robotics Group
WY-5 Series
1.Introduction
2.Treatment Robot
4. History of WY5 Series
現在,歯科医学分野で用いられている機器として顎運動測定器や食物物性測定器などが多数あります.しかし,いずれの機器もある特定の目的だけに開発されたものであり,種類の異なる複数の用途に汎用的に用いることが可能な機器はまだ開発されていません.
われわれは,これまでに咀嚼ロボットを開発し,ヒトの咀嚼運動の定量的で動的なモデルを構築し,咀嚼運動を工学的に解明する研究を行ってきました.また,顎運動障害者に対し,医師が治療機を操作するマスタ・スレーブ制御方式を用いた開閉口訓練ロボットWYシリーズを開発し,実際に治療を行ってきました.現在研究しているWY-5は,6自由度パラレルメカニズムを有し,ヒトの下顎とほぼ同等の作業領域と咬合力を発生し下顎運動の再現が可能となっています.WY-5は,様々な用途に応用可能なユニバーサル・デンタル・ロボットです.その応用例として顎運動障害者用開閉口訓練ロボットWY-5(Waseda Yamanashi-5),食物物性・評価特性ロボットWWT-1(Waseda Wayo Texturobot-1)について紹介します.
2. Treatment Robot
〜WY(Waseda-Yamanashi)5-Series〜
顎運動障害疾患において,歯科医学分野でおこなわれている治療は,歯科医師の経験と技に頼った定性的なものにとどまっています.そこで,本研究は,歯科医学分野でおこなわれている治療方法とメカトロニクス技術との融合をはかり,定量的な治療システムを確立することで,工学的な視点からヒトの顎運動メカニズムを解明し,歯科治療の高度化・高効率化に大きく貢献することを目的としています.
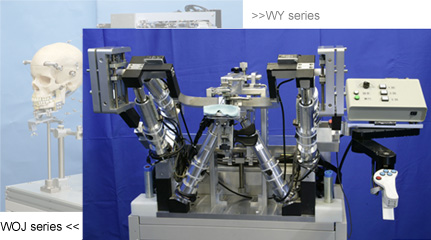
われわれは1997年度までに,定量的な治療システムとして3自由度機構を有し,医師が治療機を操作するマスタ・スレーブ制御方式を用いた顎運動障害者用開閉口訓練ロボットWY-3開発しました.さらに1998年度は,患者の咬合面を考慮し安定した治療を可能にするため,パラレルメカニズムを用いた6自由度開閉口訓練ロボットWY-5を開発しました.WY-5は医師側操作機とその操作機の動きに応じて患者の下顎に直接力を加える患者側治療機とから構成されています.(Fig.1)
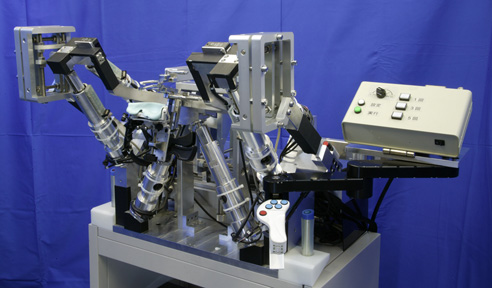
Fig.1 Treatment Robot WY-5RVI
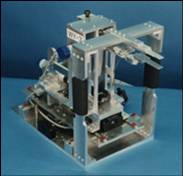
患者側治療機(Fig. 2)は,ボールねじを用いた直動機構のリニアアクチュエータとボールジョイントを使用した6自由度パラレルメカニズムで構成されています.上顎側のマウスピースは固定されており,リニアアクチュエータを伸縮させることによって,下顎側のマウスピースを6自由度に動かし治療を行います.医師の操作する医師側操作機(Fig. 3)は一般に治療に使われている木製開口器をモデルとし,開閉口の運動量を握る方向で表す1自由度と側方,前後の運動量を指示可能なスイッチを複数有しています.その操作を元に開閉口運動指令値,前後運動指令値,片側運動指令値を生成することが可能です.2001年度までに開閉口,前後,片側運動といったヒトの生理的運動を実現しています.2002年度には,閉口時に臼歯部のみが接して,前歯が接さない開咬(Openbite)と呼ばれる症状に対して従来から行われている顎間牽引療法を実現しました.
1999年度にISDN公衆回線を用いた遠隔開閉口訓練システムの構築と遠隔治療の実現し,2002年度に患者側治療器に下顎を固定する下顎把持装置を開発し,2003年度には治療中の筋電計測システムを構築しました.2004年度には,2002年度に開発された下顎把持装置の把持状態をモニタリング可能にしました.
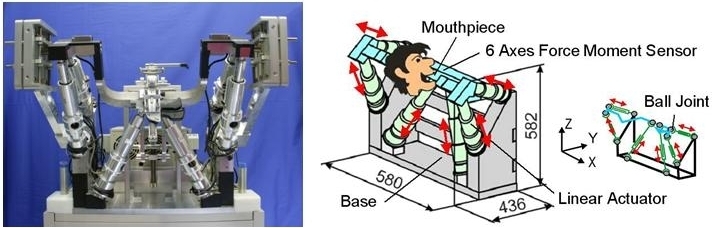
Fig.2 患者側治療機
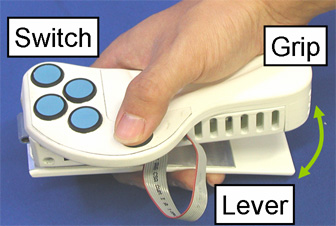 |
 木製開口器を用いた従来の治療  医師側操作機の内部 |
Fig.3 医師側操作機
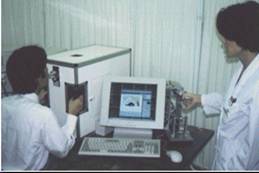
WY-5を用いた遠隔治療システムを開発しました.これはWY-5のマスタとスレーブを別々の場所に配置し,それぞれサーバ,クライアントとしてISDN公衆回線を経由したネットワーク接続にて制御を行っています.遠隔治療時におけるネットワーク構成をFig. 4に,遠隔治療の模様をFig. 5に示します.
ISDN公衆回線を使用する場合には,ダイヤルアップルータMN128-SOHO SL11を用いて2B(128Kbps)で接続し,制御データ通信を行っています.医師と患者のコミュニケーション用にテレビ電話PhoenixMini Type-Mを別のISDN回線で2B(128Kbps)接続しています.テレビ電話のモードをQCIF (Quarter Common Intermediate Format) 動き重視モード(176×144,最大30フレーム/秒)とし,詳細部の滑らかな動きが伝わるようにしています.テレビ電話の映像入力にはCCD Camera(Sony製 CCD-PC1)を用い,患者側の3台のCCDをダイヤリングムーバ&チェンジャ(Syscop製)で術者側から切り替えることができます.音声入力にはワイヤレスピンマイクを付け,ミキサーを通すことで複数人での会話が可能です.さらにテレビ電話の小さい映像をパソコンのディスプレイに写し,大きい映像と音声にしてコミュニケーションの円滑化を図っています.
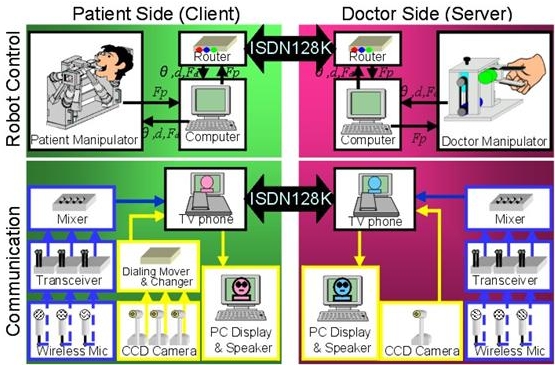
Fig.4 遠隔治療のネットワーク構成
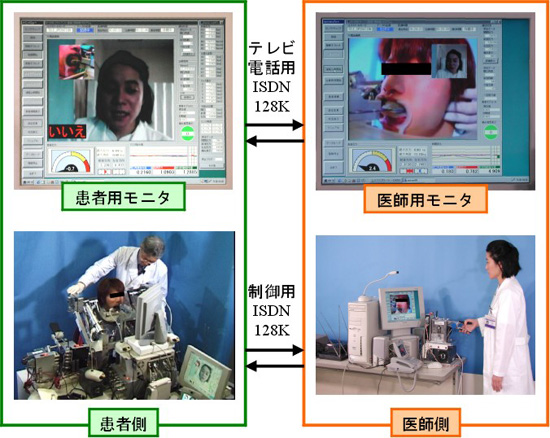
Fig.5 ISDN回線を用いた遠隔治療
治療中リアルタイムに筋電を計測可能なシステムを開発しました.従来の牽引治療においても治療中と治療後の筋電を比較すると,治療後の信号レベルが下がっていることがわかっております.これは牽引治療を行うことにより開咬が改善され,筋の緊張が低下しているためと考えられ,顎二腹筋で特に顕著に表われます.そこで,顎間牽引治療前後と治療中における左右の顎二腹筋と咬筋,側頭筋の筋電を計測すべく,筋電計測システムを構築しました.これにより治療中での筋電計測が可能になり,筋肉ごとの治療による変化を捉えることができるようになりました.それらの情報から,患者ごとの治療方針を検討することが可能になりました.
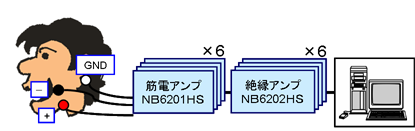
Fig.6 筋電計測装置の構成
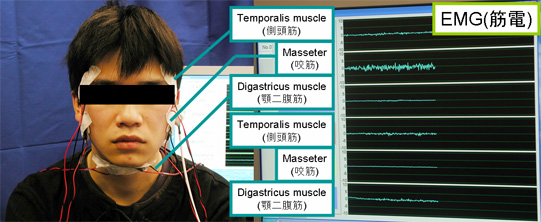
Fig.7 筋電計測装置
1.顎間牽引療法とロボット治療
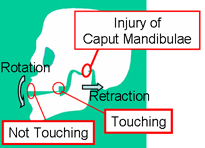
Fig.8 Open Bite
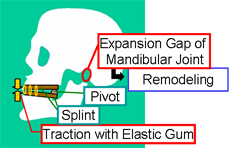
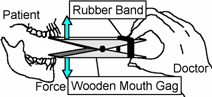
Fig.9 顎間牽引療法
顎間牽引療法は開咬症状の患者に対して従来から行なわれている治療の1つです.開咬(Open Bite)とは下顎頭が骨折やリウマチなどにより破壊,吸収され下顎骨に回転と後退がおきた状態で,臼歯部のみが咬合し,前方の歯が咬み合わない症状を言います(Fig.8).Fig.9に従来の顎間牽引療法を示します.最後臼歯部のみを挙上させる目的のピボット付スプリント装用下に,前歯部をゴムにより牽引し,関節隙を拡大させるものです.牽引後新たに得られた下顎位に対し,主として開口筋群の順応と顎関節周囲組織の形態的再生(リモデリング)がなされ,これが二次的に中枢性の調整を惹起することにより,新たな下顎位が永続的に維持されうるのではないかと考えられています.
本治療は非生理的運動の治療であるため,患者側マニピュレータの上顎,下顎マウスピースで単に関節隙を押し広げようとすると頭部が後ろに倒れこみ,また下あごが通常の開口動作により開口してしまいます.そのため,治療を効果的に行うには頭部が後方へのけぞらないよう固定し,下顎をロボットの動作に追従させるために下顎マウスピースに対してしっかりと固定する必要があります.そのため頭部固定装置・下顎把持装置を開発し治療を行なってきました.
2.下顎把持装置
2004年度に開発した下顎把持装置ではベースとなる部材をあらかじめ用意し,その上にエクザファイン(ジーシー(株) 社製)と呼ばれる親水性ビニルシリコンの型を製作することで,治療直前に各患者ごとに型を作成できるようにしました.また,効果的に治療を行うためには下顎をしっかりと固定しておく必要があるため,下顎の把持状態を測定出来るよう,ニッタ(株)のボタンセンサを患者の型とベースの間に配置し下顎把持時の分布荷重を測定する機能を追加しました.センサは6箇所に貼り付けられており,力が加われば加わるほどディスプレイ上の赤色の表示が濃くなり,患者の感覚によらずに把持状態を把握できるようになっています.(Fig.10, Fig.11)
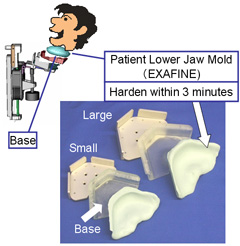 Fig.10 Instrument for Holding Lower Jaw |
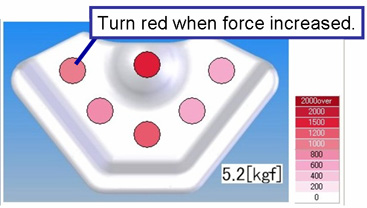 Fig.11 Jaw Holding Force |
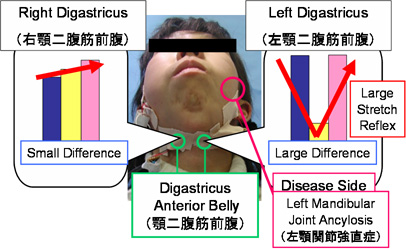
Fig.12 Treatment Evaluation using ARV
本ロボットが対象とする顎運動障害疾患は一度の治療で完治するものではなく通常は繰り返し治療を行うことにより症状が改善されていく理学療法です.そのためには患者が継続して意欲的に治療を受けられる環境を構築することが重要となります.これまでは主に治療前後に医師が測定器具を用いて測定した開口距離でその効果を確認していました.一方,本ロボットで治療中に得られたデータから,疾患の部位あるいは程度により治療データに差異があることが明らかになりました(Fig.12).そこで治療中に得られた患者のデータ(開口反力・筋電など)を医師・患者に提示し容易に治療効果を認識できる機能の構築を目指しました.
Fig.13 Change of Traction Distance
一方治療中にリアルタイムに開口反力・筋電などのデータを表示し比較するには治療の動作が一定である必要があります.そこで医師がマニピュレータを操作する従来の治療法に加え,医師が指定した特定の軌道で繰り返し動作が可能な自動測定モードを追加しました.自動測定モードにおけるロボットの軌道は過去の治療データよる医師の治療行為(Fig.13)を参考にしています.医師による操作の一般的なパターンは,時間と共に牽引距離が比例に立ち上がり,ある値で静止しそして時間と共に下がっていく,台形の形状をしています.これを踏まえ医師が設定する主なパラメータは,最大牽引距離,牽引速度,保持時間の3つとしました.
これを用い,一定の条件下で患者の反力・筋電を測定し,それを時系列的に表示・比較することで治療効果がその場で評価できるようになりました(Fig.14).治療はマスタ操作モード,自動測定モードを容易に切り替えられるようにし,治療中に自動測定モードに幾度か切り替えることで,時系列的に反力を測定できるようにしました.
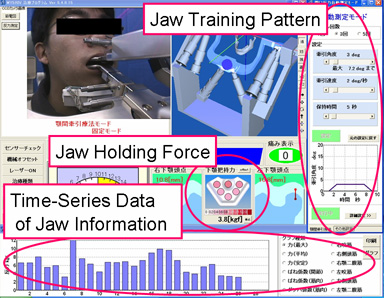
Fig.14 Patient Information Monitoring
3. Food Texture Measurement Robot
食品には,生命の維持(1次機能),感覚の刺激(2次機能),健康の維持(3次機能)の3機能があり,2次機能は味・香り・テクスチャー(texture)など食品の風味や食感が挙げられます.テクスチャーとは,口中での総合的な物理的食感としてとらえられており,ヒトの感覚による主観的方法,測定機器を用いる客観的方法の2通りで評価が行われています.客観的方法は主観的方法に比べて測定値の普遍性の点で優れていますが,従来の測定機器では1次元運動(定速圧縮)しか行うことができず,ヒトの咀嚼運動に対応した測定を行うことが不可能でした.一方,われわれはこれまでに咀嚼運動の定量的で動的なモデル(咀嚼ロボット)を構築し,咀嚼運動制御を工学的に解明する研究を行ってきました.そこで,これまでの研究から得られた知見をもとに,6自由度パラレルリンク機構を有しヒトの咀嚼運動の再現・測定が可能なシステム(Texturobot)を開発しました.
リンクを構成するアクチュエータである,ロッドの位置制御性を十分考慮し,6軸力センサを用いることで,指令値に対する位置決め誤差が0.02[mm]以内,力センサの分解能が0.001[N]であることを確認し,従来機器とほぼ同等な測定精度を実現することが出来ました.試料台およびプランジャ類は従来機器を模した物とし,市販されているアクセサリ類を流用可能としあらゆる試験に対応できるようにしました.また,従来機器では実現不可能であった側方運動に着目し,総義歯になり咀嚼能力が低下した時の咀嚼運動を考慮した食物特性測定実験を行いました. 以上,パラレルメカニズムを用いヒトの咀嚼運動を再現することで,より現実に即したテクスチャーの評価が可能なロボットを開発しました.
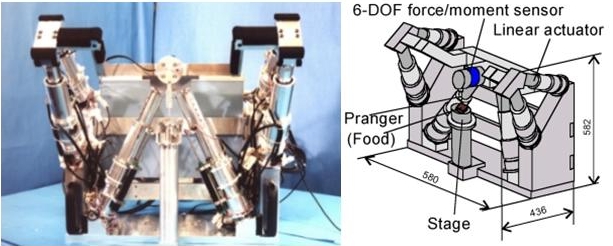
Fig.X Food Texture Measurement Robot
|
年 |
写真 |
|
|---|---|---|
|
2001年 |
|
|
|
2004年 |
|
|
|
2003年 |
|
|
|
2002年 |
|
|
|
2001年 |
|
|
|
2000年 |
|
|
|
1999年 |
|
|
|
1998年 |
|
|
|
1998年 |
|
|
|
1997年 |
|
|
|
1996年 |
|
|
|
1995年 |
|
|