Dental Robotics Groupe
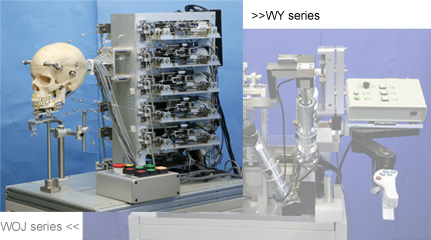
WOJ Series
1. Introduction
2. History of WOJ Series
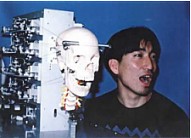
患者ロボットとはヒトの顎運動を研究するために作成された咀嚼ロボットを用いて治療時での患者反力を機械的に再現したロボットである.治療中の患者反力をロボットで再現することにより治療時の反力メカニズムを解明するとともに,実際の患者では測定することのできないデータを治療ロボットにより得ることを目的としている.この研究は2000年度より行われており,2001年度までに開閉口訓練の患者反力を再現している.また2002年度には,新しく導入した顎間牽引治療を行う際に患者ロボットを用いて模擬治療を行い,治療軌道の確認などを行った.
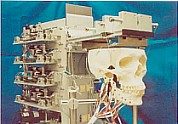
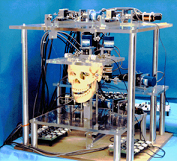
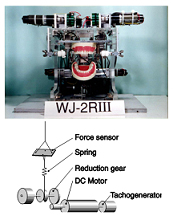
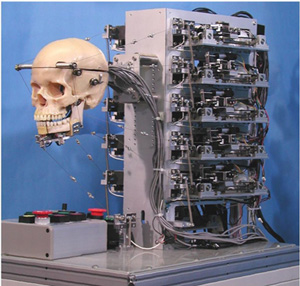 Fig.1 Waseda-Okino Jaw Robot |
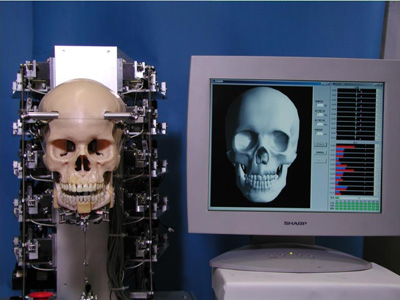 Fig.2 Jaw Robot 3D Simulation |
2. History of WOJ Series
|
年 |
写真 |
|
|---|---|---|
|
2002年 |
|
市販型咀嚼ロボット
|
|
2000年 |
|
市販型咀嚼ロボット
|
|
WOJ-1 |
|
咀嚼ロボット(WOJ-1)を用いた 咀嚼時の下顎骨歪に関する研究(昭和大学との共同研究)
|
|
1996年 |
|
市販型咀嚼ロボット
|
|
1995年 |
|
3自由度咀嚼ロボット
|
|
1994年 |
|
3自由度咀嚼ロボット
|
|
1993年 |
|
3自由度咀嚼ロボット
|
|
1992年 |
|
3自由度咀嚼ロボット
|
|
1991年 |
|
3自由度咀嚼ロボット
|
|
1990年 |
|
3自由度咀嚼ロボット
|
|
1989年 |
|
3自由度咀嚼ロボット
|
|
1988年 |
|
3自由度咀嚼ロボット
|
|
1987年 |
|
1自由度咀嚼ロボット
|
|
1986年 |
|
1自由拮抗筋モデル
|