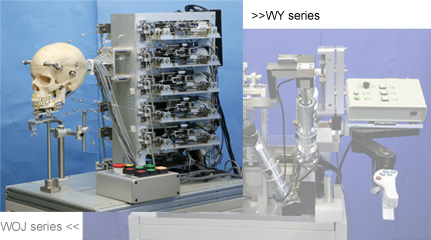
We have been developing mastication robot to understand human's mastication movement. Then, we implemented this robot as patient robot for Temporomandibular Disease treatment. We used this robot to realize patient's resistance force during jaw opening and closing training. It is important to know the patient's resistance force in order to develop an effective jaw training robot (WY Series).
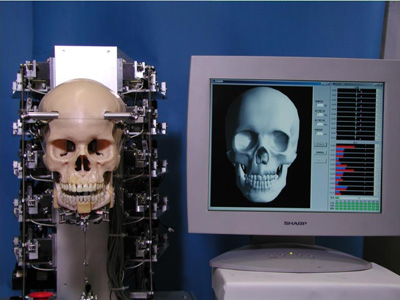
By implementing this patient robot, we can also understand the behavior of human's jaw during the treatment and we can use this robot to measure data that we can't obtain with human patient.
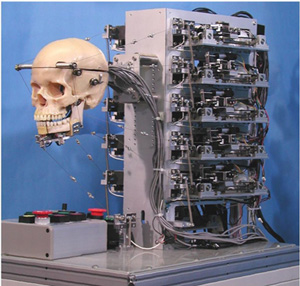
Research which is using the mastication robot as patient robot had started since 2000. In 2001, we had succeeded on realizing patient module for jaw opening and closing exercise. Then, in 2002 we had used patient robot in order to experiment the new open bite treatment module that we had introduced to WY-5 robot before real clinical treatment.
2. History of WOJ Series
|
year
name
|
picture
|
|
|
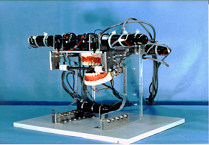
2002
WOJ-1RII
|

|
Mastication Robot for Commercial Use
- Experimental treatment of intermaxillary traction therapy which is effective for patients suffering from a disease called open bite in which only molars touch while biting Using WOJ-1RII(Patient model robot) and WY-5RIV(Treatment robot)
|
|
2000
WOJ-1R
|

|
Mastication robot for Commercial Use
- Adding the AMAs corresponded to medial pterygoid muscle.
- Development of the tension sensor that is not influenced by its own weight.
- Development of the 2-DOF biting force sensor that can measure the open-close and forward-backward direction forces.
|
|
WOJ-1
|

|
An experimental study on mechanical strain generated on surface of mandibular bone during mastication by using mastication robot (WOJ-1). (This is a joint research with Showa University)
- Investigation of the mechanical behavior of the human mandible in mastication for basic knowledge in order to understand the interrelationship between malocclusion and bone deformation.
|
|
1996
WOJ-1
|
|
Mastication robot for Commercial Use
- Improvement of WJ-3 series.
- Development of a mastication robot system for research and education.
|
|
1995
WJ-3RIII
|

|
3-DOF mastication robot
- Proposal and Realization of jaw motion control method concerned with improvement mastication efficiency.
- Simulate the human grinding motion using mastication robot and perform experimental evaluations using sieving test.
- Started the joint study to apply the mastication robot technology to a mouth opening and closing apparatus in the dental field.
|
|
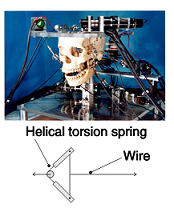
1994
WJ-3RII
|
|
3-DOF mastication robot
- Development of an actuator which changing viscoelastic coefficient by using rotary damper and torsion coil spring
- Perform mastication experiment using developed actuator, and confirm efficiency of this system
|
|
1993
WJ-3R
|
|
3-DOF mastication robot
- Development and setting of a new actuator whose hardness is nonlinear
- Perform chewing test in order to confirm muscle hardness changes in proportion to the hardness of food, and confirm efficiency of this system
|
|
1992
WJ-3
|

|
3-DOF mastication robot
- Development of mastication robot that has a function to change power vector of temporal muscle power vector
- Take a cast of human's skull to produce the model
- Derive mastication muscle arrangement quantitatively from human anatomy, and set actuators based on it
|
|
1991
WJ-2RIII
|
|
3-DOF mastication robot
- Mechanism that can change installation position of actuator and pulley
- Development of mechanism for tension control fixing spring on actuator
|
|
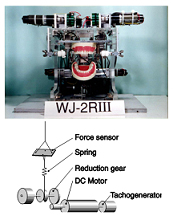
1990
WJ-2RII
|

|
3-DOF mastication robot
- Development of program which can generate orbits near actual routes of human mastication
- Development of learning algorithm that adjusts to difference of two food characteristics of "Size" and "Hardness"
- Development of force sensor for mandible joint that can measure force in 2 directions
- Fix tension sensors to all actuators
|
|
1989
WJ-2R
|

|
3-DOF mastication robot
- Development of sensor system for contactless measure using laser displacement sensor and the micro vibration rate gyro
- Development of force sensor with strain gauge for mandible joint
- Achievement of learning control of mastication movement
|
|
1988
WJ-2
|
|
3-DOF mastication robot
- The model has 3-DOF movements of mandible except minute movement in thrust direction
- Installation of actuators corresponding to masseter muscle,hyoid muscle,lateral pterygoid muscle,and temporal muscle
- Achievement of mastication movement based on Gysi's "4 phase theory" using sequence control
- Achievement of adaptive mastication movement that changes open mouth position according to transformation of food
|
|
1987
WJ-1
|

|
1-DOF mastication robot
- 1-DOF model which can reproduce movement of chewing
- Development of bite force sensor corresponding to periodontal membrane
- Design and mounting of sequence control that switches operation of muscle control system based on classification of Ahlgen's mastication cycle
|
|
1986
WJ-0
|

|
1-DOF antagonistic muscle model
- Simulation model of musculoskeletal system that rivals 2 DC motors through wire and pulley
- Achievement of changeable viscoelastic property using feedback control of position, speed, and force
|