| ENGLISH/JAPANESE |
 |
|||||
|
|
|||||
|
|
|
|
||
|
Our long term goal is to enable the interaction between musicians and robots at the emotional level of perception.
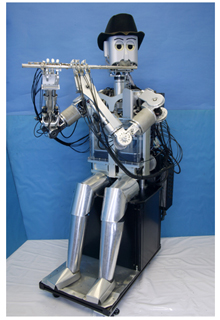
Due to its complexity, we have developed the anthropomorphic flutist robot since 1990. However, there are still difficulties in understanding how musicians transmit their ideas. Therefore, we proposed to study the interaction between musical performance robots to understand better the interaction with human partners. Thus, we have developed the anthropomorphic saxophonist robot, WAS-1(WAseda Saxophonist No.1). |
 |
|
 |
 |
 |
| WAS-1 (2008) |
WF-4RIV (2007) |
|
| (About WF-4RIV) |
| -TOP- |
|
|
|
|
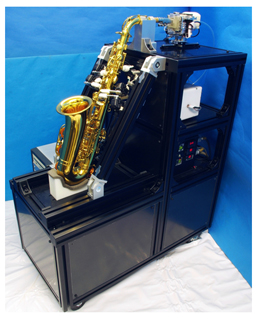
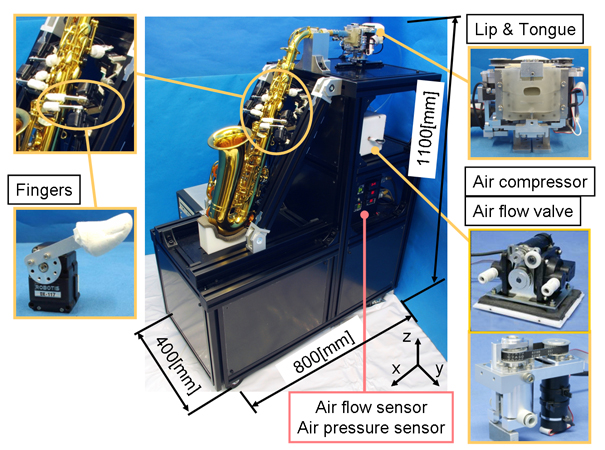
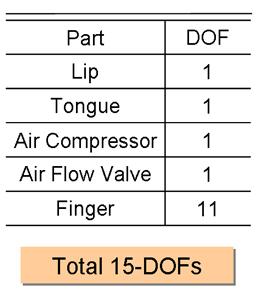
In 2008, we have developed the anthropomorphic saxophonist robot, WAS-1(WAseda Saxophonist No.1) with 15-DOFs.
In particular, the WAS-1 is composed of artificial lips made by thermoplastic rubbers,
air compressor to simulate the lungs and 11 fingers to play C3-C#5 notes.
|
|
 |
 |
 |
 |
|
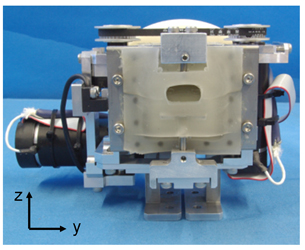
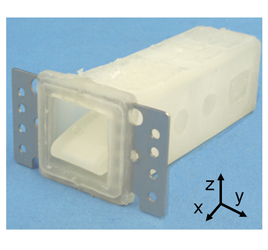
Lip is most important factor to produce saxophone sound. The artificial lip was designed to produce mechanically the shape and elasticity of the human lip. T-shaped pin is inplanted into the artificial lip and it holds in a saxphone reed. |
||
| Mouth(left)・・・・・ Mouth Mechanism(right)・・・・・ |
| -UP- |
 |
 |
|
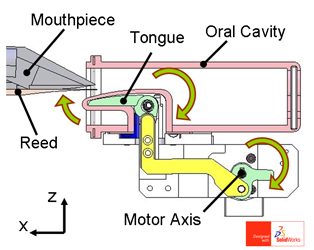
The tongue and oral cavity are made of rubbers. As shown a left figure, there is tongue near a reed of saxophone and torque is transfered from motor to tongue by link mechanism. As a result, robot can perform techniques,"attack" and "release". |
||
| ・・・・・Oral cavity(left) ・・・・・Tongue mechanism(right) |
| -UP- |
 |
 |
|
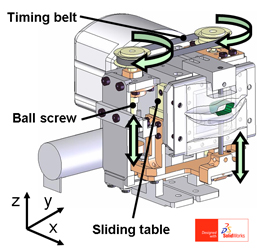
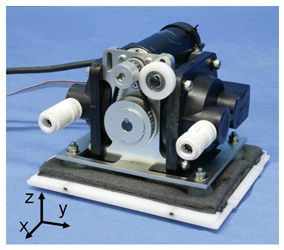
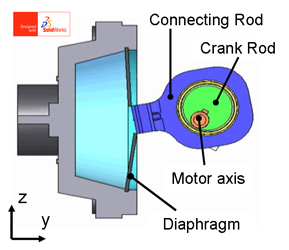
Air compressor was produced to get it smaller and lighter. Its mechanism is "Eccentric crank mechanism" as shown a right figure. And the air flow valve suppresses the pulse of the exhaled air from the air compressor. |
||
| Air compressor(left)・・・・・ Air compressor mechanism(right)・・・・・ |
| -UP- |
 |
 |
|
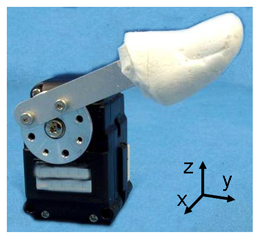
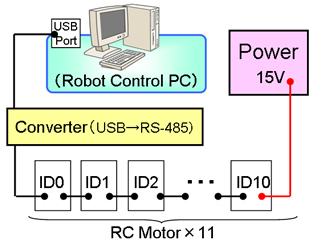
Fingers mechanism is to open and close saxopohone keys by motor driving. 11 fingers play C3-C#5 notes. As shown left figures, finger motors are applied to serial comunications by RS-485. |
||
| ・・・・・Fingers(left) ・・・・・Fingers control system(right) |
| -UP- |
| -TOP- |
|
|
|
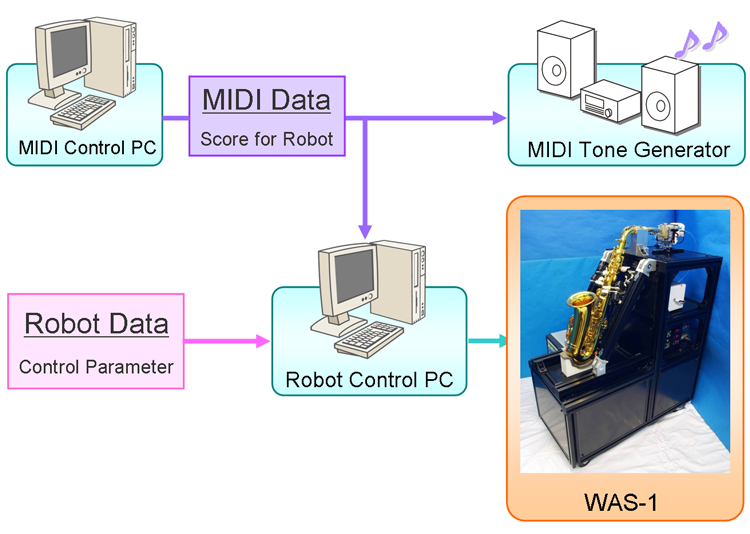
| The MIDI accompaniment system of WAS-1 consists of three computers to control the robot's musical performance: one for controlling the robot, and another one to generate the accompaniment MIDI data. These computers are connected by the MIDI system, and the synchronization of the performance is achieved by using the MIDI signal. | |
 |
| -TOP- |
|
|
|

|
Saxophone peformance of WAS-1(mpeg/1:46/20MB) 「Moonlight Serenade」 composed by Gllenn Miller |

|
WAS-1&WF4-RIV Duet(mpeg/2:38/30MB) 「Duo」 |
| -TOP- |
|
|
|
|
A part of this research was conducted at the Humanoid Robotics Institute (HRI),
Waseda University. WAS-1 has been designed by 3D CAD software "SolidWorks". Special thanks to SolidWorks Japan K.K. for the software contribution. |
|
| Humanoid Robotics Institute, Waseda University | |
| SolidWorks Japan K.K. |
| -TOP- |
| Takanishi Laboratory | Last Update 2008.10.30 Copyright(C) 1990-2008 Team Musical Performance Robot /Takanishi Laboratory All Rights Reserved. |