|
WAO-1 (Waseda Asahi Oral-Rehabilitation Robot No.1) |
 |

オーラル・リハビリテーション・ロボットWAO-1は、2本のロボットアームとそれらが取り付けられた台座、およびヘッドレストからなります。 2本のロボットアームは下の図のように、それぞれ6つの自由度を有しており、これによってアーム先端に取り付けられたプランジャを任意の位置において、任意の姿勢で顎顔面に押し当てることを可能としています。 WAO-1は、このアームを駆動してプランジャを動作させ、ヘッドレスト上の患者の顎顔面に圧迫や軽擦等の刺激を与えることで、マッサージを行います。アーム先端に取り付けられたプランジャは容易に交換が可能で、マッサージを施す部位や、症状に応じて交換するシステムとなっています。また、WAO-1には、施術中に患者が予期せぬ動作を行った際や、停電等の不慮の事態が生じた際でも患者の安全が保たれるよう、ハードウエアとソフトウエアの両面において、合計4種類の安全対策が施されています。
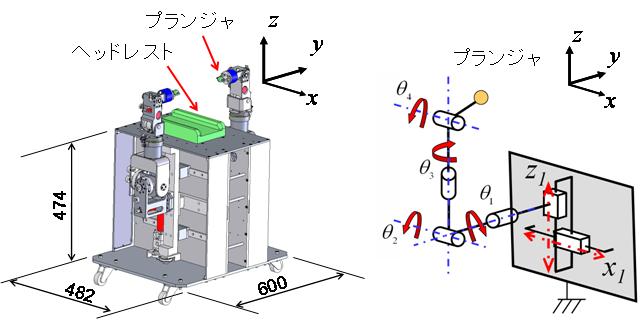
Fig.1 WAO-1自由度配置
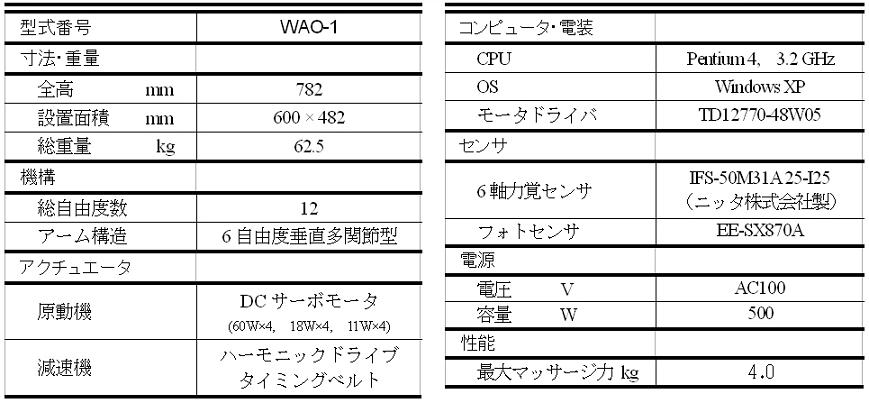
Fig.2 WAO-1仕様
|
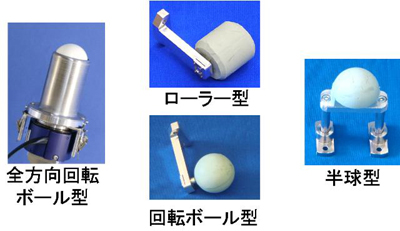
プランジャとはアーム先端に取り付けられた刺激子のことです。われわれは形状、材質、機構の異なる様々なプランジャを製作しました。これらプランジャは対象とする疾患に応じて、適宜交換して使用できるようになっています。 |
|
|
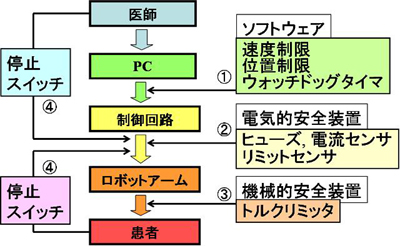
WAO-1には、施術中に患者が予期せぬ動作を行った際や、停電等の不慮の事態が生じた際でも患者の安全が保たれるよう、Fig.6に示したとおり、ハードウェアとソフトウェアの両面において、合計4種類の安全対策が施されています。まず制御ソフトウェアで可動範囲やモータの回転数が一定の範囲内に収まるように制限をかけ、ウォッチドッグタイマでそのソフトウェアの動作を監視しています①。次にヒューズおよびリミットセンサによってモータの出力を制限し②、さらに機械的な安全装置としてアーム中ほどにトルクリミッタを取り付けています③。また、医師と患者は緊急停止スイッチを持ち、いつでもロボットを停止させることができる状態で施術を行います④。 |
|
|
安全装置としてアーム中ほどにはトルクリミッタと呼ばれる装置が取り付けられています。このトルクリミッタは一定値以上の負荷がかかると作動するようになっており、プランジャに2[kg]を越える力がかかるとアームが折れ曲がり力を逃がす機構となっています。この装置によって、停電やPCのフリーズなど、ソフトウェアによる制御が行えない事態での患者の安全性の確保を実現しています。 |

トルクリミッタ動作(MPG形式 4秒 0.8MB) |
模擬治療
健常者6人の耳下腺に対して2分間マッサージを行いました。この実験ではWAO-1によるマッサージの有効性を確認するために唾液の分泌量を測定しました。唾液分泌量はサクソンテストという方法で測定しました。サクソンテストとはガーゼを2分間口に含み、前後の重量を計測することで唾液分泌量を測定する方法です。今回の実験ではマッサージ前とマッサージ中の2回、測定を行いました。その結果、マッサージを行うことで唾液分泌量が増加していることが確認されました。また、この結果に対してt検定を行ったところ、p<0.05の水準(p=0.02)で、有意に増加したことが分かりました。

耳下腺マッサージ(MPG形式 14秒 2.4MB) |
健常者11人の咬筋に対して2分間マッサージを行いました。マッサージ前、直後、10分後、20分後にサーモカメラを用いて皮膚表面温度を測定し、マッサージ前と直後に超音波診断装置を用いて咬筋幅径を測定しました。その結果、皮膚表面温度はマッサージ直後から上昇し始め、10分後まで上昇が維持されることが確認されました。。また、咬筋幅径は施術の前後で、増加が見られました。医師によるマッサージの前後でも同様に増加が見られ,ロボットのマッサージには医師によるマッサージとほぼ同等の効果があることが確認されました。

咬筋マッサージ(MPG形式 19秒 3.3MB) |

マッサージ動作(MPG形式 1分43秒 46.1MB)
本研究は早稲田大学の人を対象とする研究等倫理審査委員会の許可を得て実験を行っています。
(承認番号 理06-014)
オーラル・リハビリテーション・ロボットへ 高西研究室へ