|
WAO-1 (Waseda Asahi Oral-Rehabilitation Robot No.1) |
 |

WAO-1 is composed by two arms (each with 6-DOFs) and plungers attached to the end-effectors in order to provide effective massage to patients. Such plungers are exchanged easily depending on the needs of the kind of massage. The WAO-1 has been designed to applied force to facial tissues of patients. Therefore, we require considering safety features that are needed to avoid as much as possible any possible risk to the patient. For that purpose, we have proposed the safety system shown in Fig. 5.
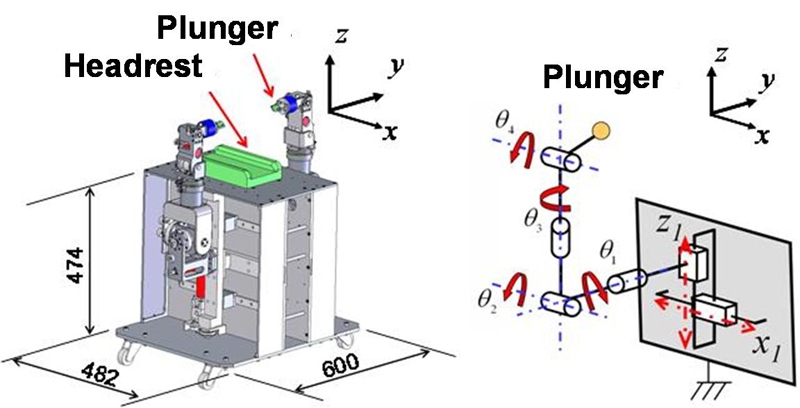
Fig.1 WAO-1 DOF Configuration
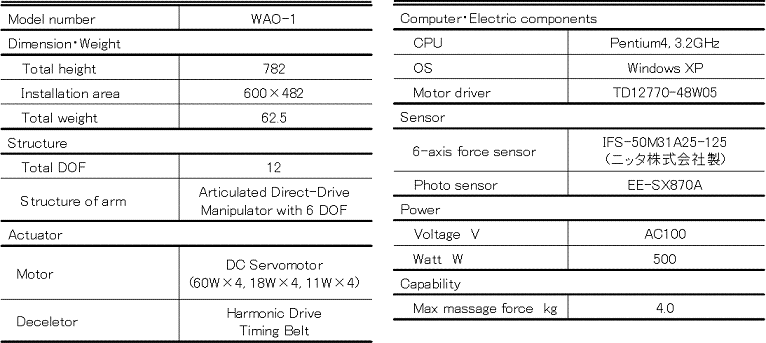
Fig.2 WAO-1 specification
|
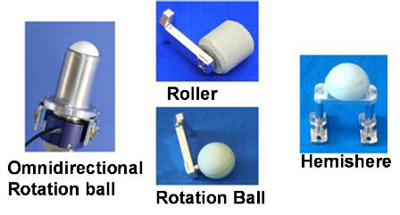
A plunger which applies force to the facial tissues is located at the end-effector of each arm. We have designed different kinds of plungers by changing their shape, material, and number of passive degrees of freedom. Such plungers are exchanged easily depending on the needs of the kind of massage. |
|
|
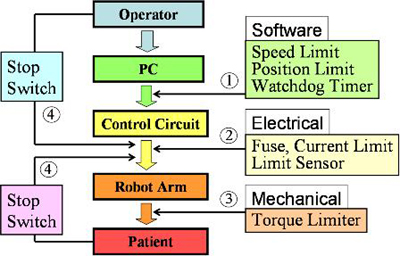
WAO-1 has the safety system shown in Fig. 5. As it can be observed; at first software limiters and watch dog timer are implemented into the control software of the robot. In particular, rotational speed and motion positioning are limited within safety range of operation. The second safety feature has been implemented by attaching limit sensors at each DOF as well as fuses to limit the current supplied to each motor. The third one is implemented through torque limiters. The torque limiter has been placed in the middle part of each arm. Finally, the fourth and fifth safety features enables to the doctor and the patient to stop the operation of the robot at any time in case of emergency. |
|
|
The torque limiter has been placed in the middle part of each arm. In the case that the plunger load exceeds a threshold value; even if the robot system presents an unexpected failure meanwhile applying force on the patient's face, the arm will bend and the load will be also released to avoid any injury to the patient |

トルクリミッタ動作(MPG形式 4秒 0.8MB) |
Pre-clinical test

WAO-1 provides the massage to 6 healthy volunteers (without any maxillofacial disorders). Each subject is provided the massage to its parotid gland for 2 minutes. In order confirm the effectiveness of the massage provide by WAO-1, the production of saliva was considered as performance index. This index is measured by using the Saxon test; which is a standard method to confirm the effectiveness of the massage therapy. In this test, gauze is put into subject's mouth for two minutes, and the weight of saliva is then measured. The experimental results are shown in Fig.11. As we can observe, the average production of saliva was increased by 0.63 [g] after providing the massage. By analyzing the collected data with a t-test, we found a significant difference (p < 0.05). Thus the effectiveness of the massage to the parotid gland by WAO-1 is confirmed.

Parotid massage(MPG format 14sec 2.4MB) |

WAO-1 provides the massage to 11 healthy subjects (without any maxillofacial disorders). In this experiment, WAO-1 provides massage to masseter muscle for 2 minutes. The skin temperature and size of masseter is measured before and after the massage. Skin temperature is measured by the thermal camera before, just after, 10 minutes after and 20 minutes after the massage. Size of masseter muscle is measured by the ultrasonograph before and just after massage. As a result of the massage of WAO-1, the temperature increases immediately after the massage, and keeps rising until ten minutes later. The amount of an increase after ten minutes was 0.8[℃].Increase rate of the size of masseter muscle has increased 16.8%. As a result of the massage of doctor, increase rate of the masseter muscle size has increased 18.7%. In both cases, an increase was found. However, there was so no difference on the increase rate.

Massage to masseter muscle(MPG format 19sec 3.3MB) |
Go to Oral Rehabilitation robot Go to Takanishi Laboratory