|
WAO-1R (Waseda Asahi Oral-Rehabilitation Robot No.1 Refined) |
 |

オーラル・リハビリテーション・ロボットWAO-1Rは2本のロボットアームを有し、WAO-1の自由度配置を変更することにより任意の位置と姿勢でマッサージが可能となりました。これにより、顎関節症に有効とされる咬筋と側頭筋に対し、医師と同等のマッサージが可能となりました。ロボットの制御とマッサージ軌道の生成は詳細はこちらをご覧下さい。
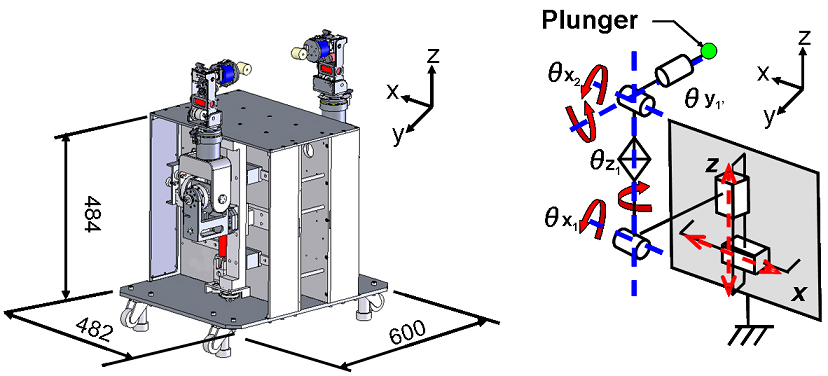
Fig.1 WAO-1R自由度配置

Fig.2 WAO-1R仕様
WAO-1におけるロボットアームの問題点はY軸方向の自由度が機構の干渉により、回転角度が60[deg]であるため、ロボットアーム先端のプランジャが任意の姿勢を取れませんでした。様々なマッサージ手技を再現するためにロボットアームの自由度配置の変更を行いました。

Fig.1 WAO-1R自由度配置
|
WAO-1のY軸方向の自由度を機械的にロックし、アーム先端部に新たに自由度を加え、片腕6自由度の合計12自由度としました。 自由度を先端部に設けましたが、アーム先端部をWAO-1と同等の寸法にし、軽量化に成功しました。 |
|


マッサージ動作(MPG形式 1分43秒 46.1MB)
評価実験
マッサージ力計測
|
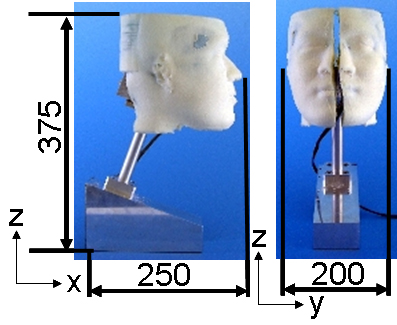
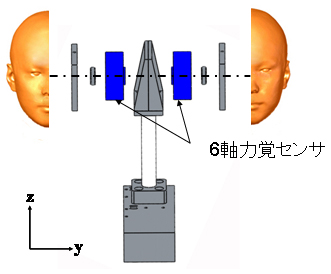
WAO-1Rによるマッサージ力を定量的に評価するためにマッサージ力計測モデル(WAH-3)を製作しました。WAH-3は右顔面、左顔面それぞれに6軸力覚センサを用いて、左右両手のマッサージ力を計測可能です。また、WAH-3は人間の顔面組織同様に骨組織、筋組織、その他の軟組織からなる構造としました。
|
|

マッサージ動作(MPG形式 18秒 3.2MB)
模擬治療
WAO-1Rを用いて健常者12人に4分間咬筋・側頭筋に対して軽擦法、柔捏法、軽擦法の順番で行い、その後、側頭筋に対して同様に軽擦法、柔捏法、軽擦法を行いました。 そして、マッサージ前とマッサージ後における最大開口量を測定しました。マッサージを行うことで,最大開口量は平均値で6.8[mm]増加し、p<0.05の水準で有意に増加することが分かりました。
本研究は早稲田大学の人を対象とする研究等倫理審査委員会の許可を得て実験を行っています。
(承認番号 理06-014)
オーラル・リハビリテーション・ロボットへ 高西研究室へ