|
WAO-1R (Waseda Asahi Oral-Rehabilitation Robot No.1 Refined) |
 |

WAO-1R consists of two 6-DOF arms. WAO-1R provides massages on any directions with the plunger that rotates passively without adding friction force to facial organs. Please click here to refer to the details of controll system.
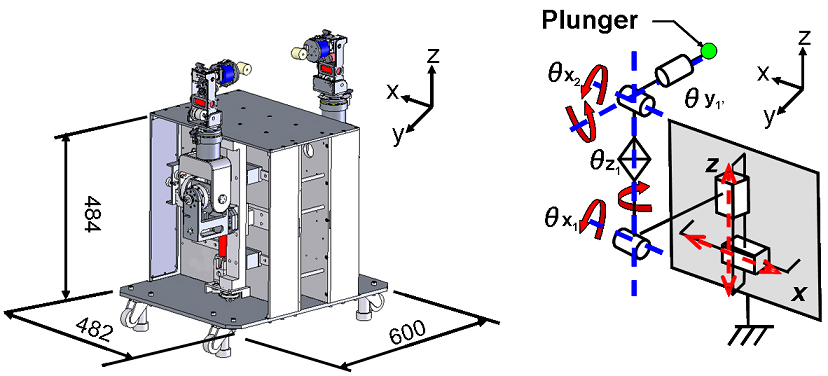
Fig.1 WAO-1R DOF Configuration
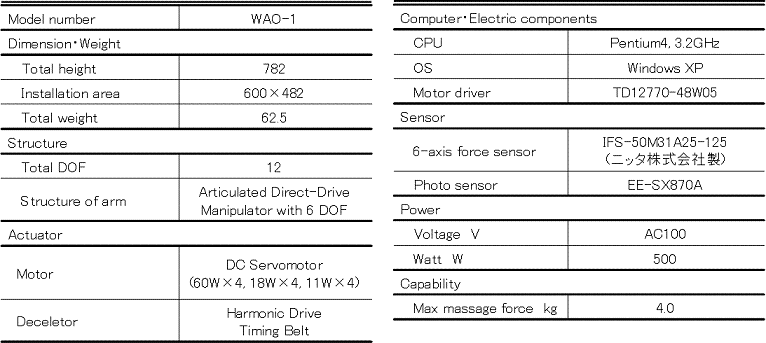
Fig.2 WAO-1R specification
We redesigned the arms of the robot increase variety of massage. By this improvement, the angular limitation of end effecter is increased from 60[deg] to 360[deg].

Fig.3 DOF configuration
|
We redesigned the end effecter of the arms, shown in Figure4. Each of the arms of WAO-1R is composed by a 6-DOF manipulator. Each arm consists of two translational DOF on the base and four rotational DOF at the each joint of the arm. Due to this DOF arrangement, the robot arms do not obstruct the patient’s field of view while providing massage. Each translational DOF consists of a ball screws and a DC servo motors which assures high positioning accuracy. Each rotational DOF consists of a harmonic drive gears and a DC servo motors with no backlash. |
|


Massage to masseter muscle and musculus temporalis (MPG format 19sec 3.2MB)
Evaluation experiment
Measurement of massage force
|
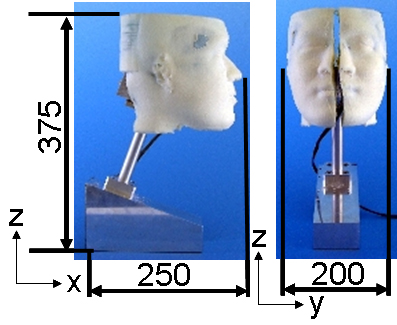
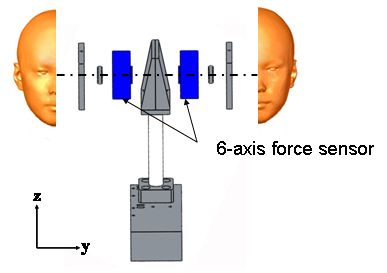
In order to measure massage’s force, we developed the Waseda-Asahi Head Model No.3 (WAH-3), as shown Figure5. WAH-3 is built in 6-axis force sensor, as shown Figure6. Therefore, WAH-3 could measure massage’s force of WAO-1R and skilled physiatrician. WAH-3 consists of skull born, muscle and soft skin. Skull born was made of epoxide resin by CT data. Masseter and musculus temporalis were made of silicon. Soft skin was made of urethane.
|
|

Massage for WAH-3(MPG format 18sec 3.2MB)
Pre-clinical test
WAO-1R provided massage to masseter muscle and musculus temporalis to 12 healthy volunteers for each 2 minutes. Amount of mouth-opening was measured before and after the massage. The average amount of mouth-opening was increased by 6.8[mm] after providing the massage. A significant difference was found(p<0.05)
Go to Oral Rehabilitation robot Go to Takanishi Laboratory