(Waseda-Shoes No.2) |
|
|
| üĪ Research Purpose |
The advantages of biped locomotion in contrast to wheel-driven locomotion are particularly obvious
in rough terrain. However, a disadvantage is that the legs of a biped robot support discontinuously
its body and a support polygon generated by the feet is small in a swing phase. Also, its speed and
energy efficiency on flat ground is not so effective.
Our objective is to develop a biped robot to be able to step over an obstacle and be able to move
by wheels on the flat ground. If a biped robot has foot-wheeled system, its energy efficiency will
be able to be improved and it will be able to move rapidly on flat plane using the wheel system.
| üĪ Specifications |
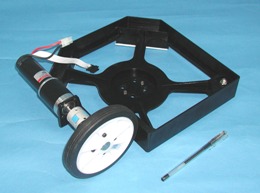
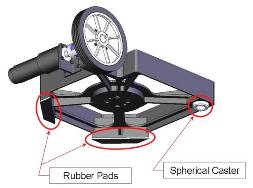
WS-2 consists of a spherical caster, a wheel and rubber pads. The rubber pads are attached to the inside
of the foot, the active wheel that is driven by a DC motor is mounted on the front of the outer side of
the foot, and the spherical caster is mounted on at the back of the outer side of the foot not to be
constrained in a plain.
The specifications of WS-2 are shown as follows.
 |
 |
|
| (a) Photograph | (b) Assembly Drawing | |
| üżWS-2 Specifications | |
| Size | 259ü~349ü~60 mm |
| Weight | 2.5 kg |
| Wheel Diameter | 130 mm |
| DC motor | 90W (Nominal Voltage 42V) |
| Maximum Velocity | 6.0 km/h |
The foot module proposed in this research is universally designed, able to be applicable to all biped robots.
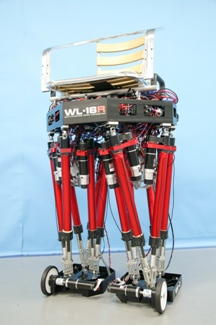
The multi-purpose biped locomotor WL-16R (Waseda-Leg No.16 Refined) is chosen
as an evaluation platform.
Appearances that WS-2 is applied on the robot are as follows.
 |
 |
 |
| (a) front | (b) right | |
 |
 |
|
| (c) back | (d) left | |
| WL-16R/WS-2 | ||
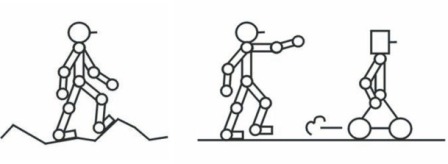
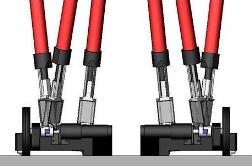
| üĪ Switching between Biped Walking and Wheel Driving |
If the foot is tilted to the outside, only the active wheel and the caster touch the ground.
It makes a robot able to change biped walking to wheel-driven movement.
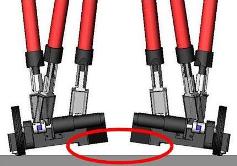
In wheel driving mode, only wheels and casters touch the ground because the feet are tilted to the outside.
Therefore, the robot can move on the ground freely. To tilt both feet, each foot should be rotated around
the edge formed by the wheel and the spherical caster.
 |
 |
|
| (a) Biped Walking Mode | (b) Wheel Driving Mode | |
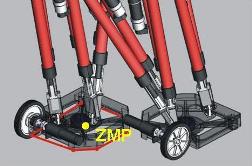
| üĪ How to Realize Walk and Wheel Movement |
We have studied the mechanism and control of biped walking robots since 1966.
In biped walking mode, as applying WS-2 to biped walking robots, desired ZMP trajectories are planned to
set the desired ZMP near the center of the support polygon formed by four grounding points of sole.
It is the same way as the normal biped-walking mode that has been studied in our laboratory.
Using this as the basis for computed waist trajectories enables a robot to walk.
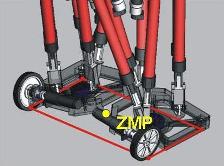
In wheel driving mode, robot motion is also possible while securing stability in the region formed by the
wheels and casters. Therefore, by applying cumulative technical knowledge on biped walking (moment
compensatory motion), stable wheel driving becomes possible.
By designing a driving trajectory and specifying the position and direction of a robot respectively,
the desired ZMP trajectories are automatically set and the feet trajectories simultaneously decided.
In addition, "moment compensatory motion", produced in our laboratory, is applied to ensure the
calculated desired ZMP trajectories can be followed. Waist trajectories, enabling a robot to move stably
without falling, are calculated.
 |
 |
|
| (a) Biped Walking Mode | (b) Wheel Driving Mode | |
| üĪ Experiments |
Various experiments using WL-16R mounted on WS-2 are conducted on a flat plane.
Locomotion switching between a biped walk system and a wheel system according to terrain is realized.
Also, high speed movement and whirling motion is achieved using WS-2.
|
(a) Maximum Acceleration The shortest time was measured in the range of no slipping. ü× Max Acceleration: 1.7[m/s2], Max. Velocity: 0.61[m/sec] | |
| (b) Cutting a Figure of Eight The driving path was designed in a figure of 8, and the robot's ability to traverse the course was verified. | |
| (c) Switching between Biped Walking and Wheel Driving Setting a wooden board with a height of 73mm and a length of 600mm on the flat ground, the following experiments were conducted. (i) Transfer in front of the board in wheel driving mode (ii) Climb up the board in biped walking mode (iii) Transfer to the edge of the board in wheel driving mode (iv) Climb down the board in biped walking mode (v) Turn and move away from the board in wheel driving mode | |
| üĪ Future Work |
At the present stage, a real-time stabilizing control has not been introduced, meaning the robot cannot
respond to disturbance. Our next goal is to construct the control a method to solve this problem.
| |||||||||||||||||||||||||||