The robots have been subjectively evaluated using questionnaires. The purpose of this research is to objectively measure the psychical effect of a robot on humans. The psychical effects appear in the tension level, emotion and consciousness. We consider that they are measurable by the physiological parameters and the motions. Therefore, we developed the bioinstrumentation system WB-1(
Waseda
Bioinstrumentation system no.
1) that can measure the physiological parameters and the arms motion, in 2005.
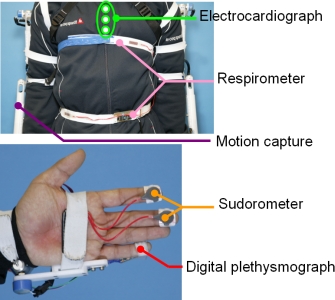
The bioinstrumentation system WB-1 consists of the motion capture, elecrocardiograph, digital plethysmograph, respirometer, and sudorometer. It weighs 2.2[kg], and is driven by batteries. The details are as follows.
(If you click the image and the name of instruments,
the image is zoomed and you can jump to the detail, respectively.)

|
|
|
Fig.2.1 WB-1(wearing view)
|
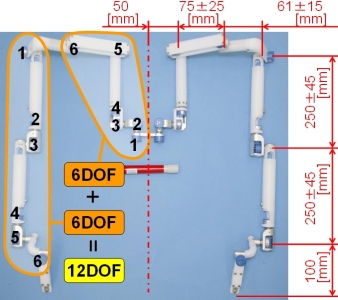
Fig.2.2 Instrument's detail
|
The motion capture is the mechanical type and has a serial link mechanism with a potentiometer at each joint. It has 24-DOFs which consists of 6-DOFs from the back origin to the shoulder and 6-DOFs from the shoulder to the wrist in order to follow the movement of the shoulder’s rotation center.
|
↑Click the image, and you can see the movie.
(62[sec] MPEG format 10.3[MB])
If you cannot watch the movie,
please save mpeg file in your computer first.
|
|
Fig.2.3 Whole View
|
The electrocardiograph measures tiny current produced by the heart by applying electrodes to the body surface. Electrodes were pasted on the sternum which has few muscles, not to be affected by other myoelectric activities. The heart rate is calculated by setting a threshold as shown in Fig. 2.5.
|
|
|
| Fig.2.4 Location of electrodes |
Fig.2.5 ECG(at rest) |
|
2.3 Digital Plethysmograph
|
The light of LED is irradiated to the little finger. The digital plethysmograph measures the transmitted light by using photodiode, and so the blood flow is obtained.
In addition, we can calculate PWTT(Pulse Wave Transit Time) from the pulse wave and ECG. PWTT shows the relative change of blood pressure.
|
|
|
Fig.2.7 Pulse Wave(at rest)
|
|
|
| Fig.2.6 Measurement method of pulse wave |
Fig.2.8 PWTT |
|
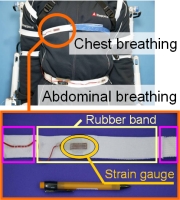
The rubber band, on which the strain gauge is put, is wound around the chest and the abdomen. The respirometers measure both thoracic and abdominal respiration.
|
|
|
| Fig.2.9 Respirometer |
Fig.2.10 Respiration(at rest) |
|
Electrodes are put on forefinger and middle finger. Sudorometer measures the skin resistance change by applying the tiny current to the electrodes. We can obtain the mental sweating on the palm.
|
|
|
|
Fig.2.11 Location of electrodes
|
Fig.2.12 Perspiration
|
Each measured data is filtered. And then, they are converted from analog data to digital data by a PIC and are sent to a PC by RS232.
Fig.3.1 System chart
Part of this reserch was conducted at the
Humanoid Robotics Institute (HRI), Waseda University. We would like to thank Italian Ministry of Foreign Affairs General Direction for Cultural Promotion and Cooporation, for its support to the establishment of the
ROBOCASA laboratory and for the realization of the two artificial hands. And part of this was supported by a Grant-in-Aid for the
WABOT-HOUSE Project by Gifu Prefecture. Finally, We would like to express thanks to
ARTS Lab, NTT Docomo, SolidWorks Corp.,
Advanced Reserch Institute for Science and Engineering of Waseda University, Prof. Hiroshi Kimura for this supports to our reserch.

takalab.jpg)
