In recent years there has been an increasing amount of research and development of technologies and methods to analyse and quantify body movement, in a variety of fields for different applications. Automatic human movement sensing technology is called motion capture, and respond to the fundamental necessity of a better understanding of the performance of human being in several situations, to clarify not simply what a skilled (or healthy) person does better than a novice (or patient), but also how.
Motion capture obtains motion data from human performers, tracks their key points/joints movement, and translate them into a digital model, to analyse in detail the performance characteristics. Motion capture systems are commonly divided in these three categories:
1) camera-based motion capture systems
2) magnetic-based motion capture system
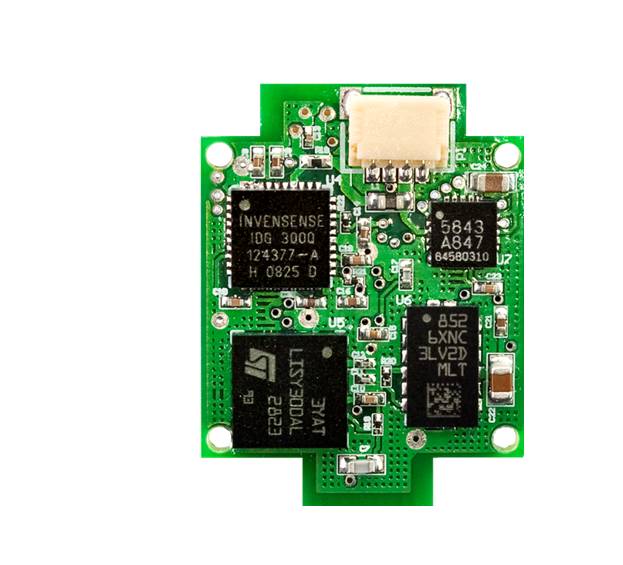
3) inertial-sensor-based motion capture system
Each of these systems presents several drawbacks, and choosing the appropriate one is difficult and depends on many factors. Camera-based systems are very expensive and can be used only in a calibrated room; the markers they need are heavy and bulky and need to be always in sight on the cameras, which is not always possible.
Magnetic-based systems have magnetic distortion problems and position data are acquired at a relatively low frequency, thus limiting the precision of the analysis.
Current inertial-sensor-based systems are too big for most practical applications, because they hinder free movement.
None of the current systems, therefore, fit the requirements of motion capture for applications such as Minimally Invasive Surgery (MIS), neurosurgery, gait analysis, rehabilitation, where precision is a critical requirement.
Our group's mission is to fill this technology gap, developing a motion capture system for precision applications, minimally invasive, relatively inexpensive, and reconfigurable or expandable to include measurement of side physiological parameters, a perfect sensor integration to have a complete and synchronized image of the human body state during movement.