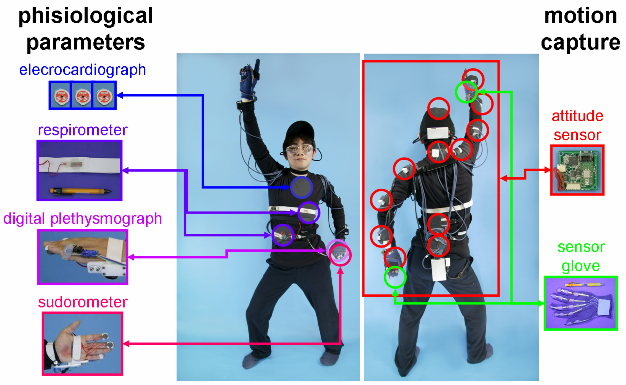
Fig.2.1 System Overview of WB-2
Personal robots and robot technology (RT)-based assistive devices are expected to play a major role in our elderly-dominated society, with an active participation to joint works and community life with humans, as partner and as friends for us. For these kinds of robots, there is a strong need for active behavior and adaptation to their partners or the environment.In particular, sll of these partner robots must have no negative physical or psychological effects on the people they are interacting with. Unfortunately, at present, since we do not have sufficient knowledge and understanding of humans, we do not know how to clearly define the criteria to evaluate these effects. It is important, in any case, to take into account both subjective impressions and unconscious reactions.
To obtain subjective impressions, a questionnaire is usually used. Concerning unconscious reactions, changes in human emotional states appear in physiological parameters such as brain waves, respiration, heart rate, muscle tension, perspiration, and pulse waves. We also can measure the state of human consciousness by measuring the motion of the upper body, in particular the motion of the head, eyes, arms, and trunk, as well as the hand grasp. Also, Emotional Body Language (EBL) plays an important role in emotional communication and decision-making (for example, humans square their shoulders if they are angry, or reach out their hands to food if they are hungry, and so on).
The goal of our research, therefore, is to develop a portable Bioinstrumentation System that can objectively measure and understand the physical and physiological effects of the interactions between robots and humans. In this page we present the Waseda Boinstrumentation system no.2 which consists of both sensors that measure physiological parameters (namely ECG, respiration, perspiration, pulse wave) and a motion capture system that measures upper body motion and hand motion.
The bioinstrumentation system WB-2 consists of the Motion Capture Subsystem MCS (head, arms, waist, and hands), and of the Physiological Parameters Measuring Subsystem PPMS (electrocardiograph, digital plethysmograph, respirometer, and sudorometer). It weighs 2.0[kg] and is driven by stabilized power supply.
Fig.2.1 System Overview of WB-2
We developed a 9D posture measurement module consisting of acceleration sensors (Aichi Micro Intelligent AMI-601),rate gyros (InvenSense IDG-300 and Murata ENC-03), and geomagnetic sensors (Aichi Micro Intelligent AMI-601), as shown in the next figure. A demostration video of this subsystem is also presented. Important aspects for the design were high miniaturization and low price.
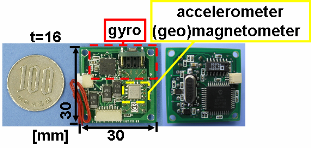
Fig.2.2 Attitude sensor |
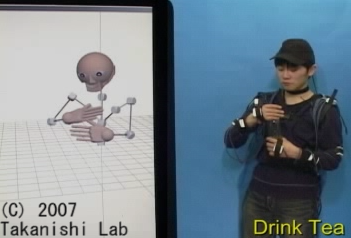
Video of Upper Body Motion |
We developed a 15-DOFs sensor glove using Abrams Gentile Entertainment Bend Sensors, as shown in the next figure. A demostration video of this subsystem is also presented. A Key aspect for the design was high miniaturization and low price.

Fig.2.3 Sensor Glove |
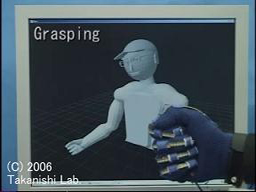
Video of Hand Motion |
The electrocardiograph measures the action potential created by heart wall contraction by applying electrodes to the body surface. Electrodes were placed on the sternum which has few muscles, not to be affected by other myoelectric activities. The heart rate is calculated by setting a threshold on the measured signal, as shown in Fig. 2.5.
Fig. 2.4 Location of electrodes |
Fig. 2.5 ECG(at rest) |
The pulse wave is the expansion of an artery as a result of heart contraction. The hemoglobin in blood absorbs the light within a certain wavelength range (about 660[nm]). The transmitted light when 660[nm] light is irradiated to the body depends on the quantity of the hemoglobins according to the capacity change of a blood vessel. Therefore, it is possible to calculate the pulse wave from the transmitted light.
In addition, we can calculate PWTT (Pulse Wave Transit Time) from the pulse wave and ECG. PWTT shows the relative change of blood pressure.
Fig. 2.6 Measurement method of pulse wave |
Fig. 2.7 Pulse Wave(at rest) |
Fig. 2.8 PWTT
Rubber bands with strain gages (KFG-20-120-C1-11, Kyowa Electronic Instruments Co., Ltd.) were wound around the abdomen and the chest. The respirometer measure both thoracic and abdominal respiration.
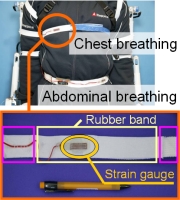
Fig. 2.9 Respirometer |
Fig. 2.10 Respiration(at rest) |
In our body, sweat glands are controlled by the sympathetic nervous system. Therefore, perspiration in the skin depends on the arousal state (nervous, anxious or excited). Electrodes are put on forefinger and middle finger. Electrodermal activity (EDA) is measured by applying a constant 0.5[V] voltage to one electrode.
Fig. 2.11 Location of electrodes |
Fig. 2.12 Perspiration |
Each measured data is converted from analog data to digital data by a PIC and is sent to a PC by RS232.
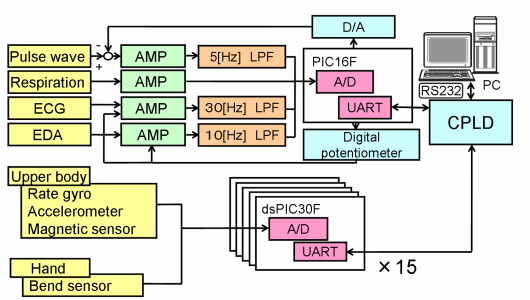
Fig. 3.1 System Configuration
Part of this was conducted at the Humanoid Robotics Institute (HRI), Waseda University. We would like to thank Italian Ministry of Foreign Affairs General Direction for Cultural Promotion and Cooperation, for its support to the establishment of the RoboCasa laboratory. And part of this was supported by a Grant-in-Aid for the WABOT-HOUSE Project by Gifu Prefecture. Finally, we would like to express thanks to ARTS Lab, SolidWorks Corp., Advanced Reserch Institute for Science and Engineering of Waseda University, Prof. Hiroshi Kimura for this supports to our research.
Last Update: 2007-11-21