Background: While several metrics have been employed to characterize different phases of surgical movements in laparoscopy, the extremely small
movements and sizes involved in neurosurgery (working field is usually 280-370 [mm2] x h5-10[cm],
target size 0.2-1.5[mm]) have prevented until now the development of similar methodologies and systems.
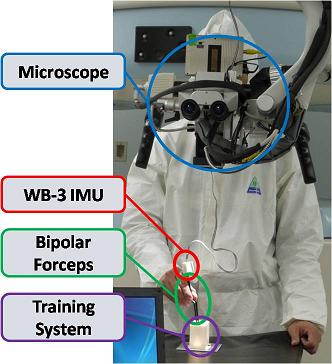
Therefore, based on the extremely reduced weight and size of WB-3 IMU, it could be mounted on the bipolar forceps of neurosurgery, and to be used during
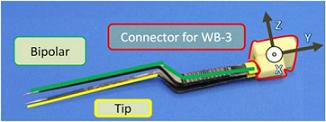
normal tasks without disturbing surgeon's performance. As a preliminary experimental setup in Fig. 1, we applied WB-3 IMU to a bipolar forceps (Fig. 2),
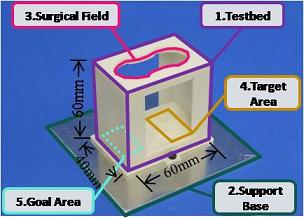
the most commonly used instrument in neurosurgery, and we used the skill evaluation system (Fig. 3) to analyze the movements of neurosurgeons in a simple pick and place scenario.
Objective: Our aim is to develop evaluation tools and methodology that allow the
characterization of the neurosurgeon's movements during surgery, and to evaluate the improvement of the performance over training.