Pipe inspection robot WATER Series
Pipe inspection Robot
Overview
In recent years, Japan has been promoting long-term use of residential buildings due to environmental concerns, leading to an increase in the demand for housing inspections. However, inspecting the attic space in wooden houses has become a challenging task due to its narrowness and the presence of obstacles such as beams and insulation materials.
System
The robot is equipped with a camera, a propeller module, and a microcontroller. Each of these components is connected to the control PC and power source via communication cables.
Research Contents
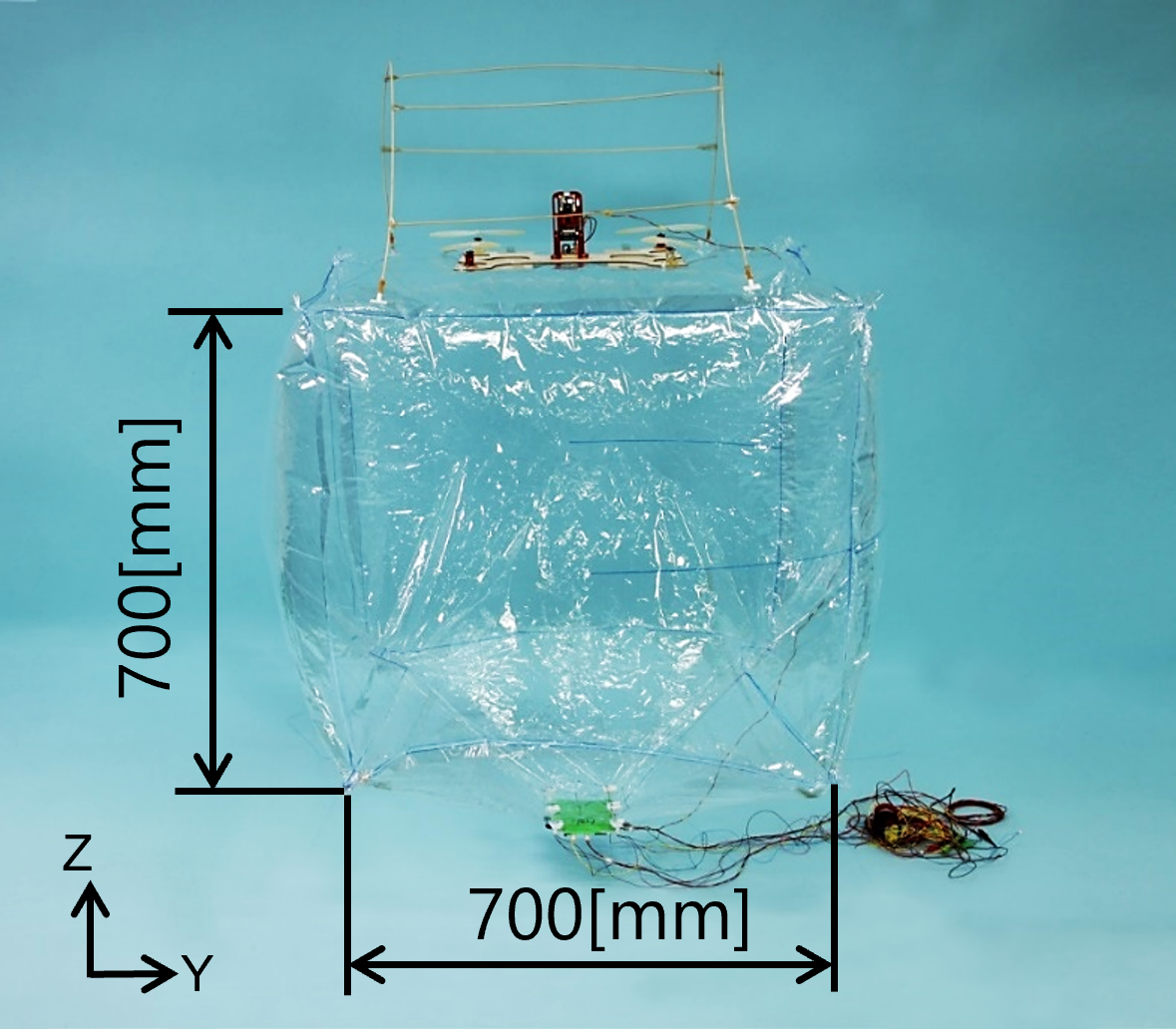
Baloon Robot (2022)
For the robot's method of movement, we have chosen a flying approach to avoid crushing or winding up the insulation material that is spread across the attic floor. The robot consists of a balloon, a propeller module on the top of the balloon, and a microcontroller on the bottom of the balloon. By filling the balloon with helium, the robot generates buoyancy and ascends, while the propellers on the top of the balloon propellers the air upwards for descent. To prevent the robot from spinning due to torque, the four propellers rotate in opposite directions. By controlling the amount of rotation, the robot is designed to perform vertical movement, horizontal movement, and turning. This design allows the robot to achieve both vertical movement and rotation.