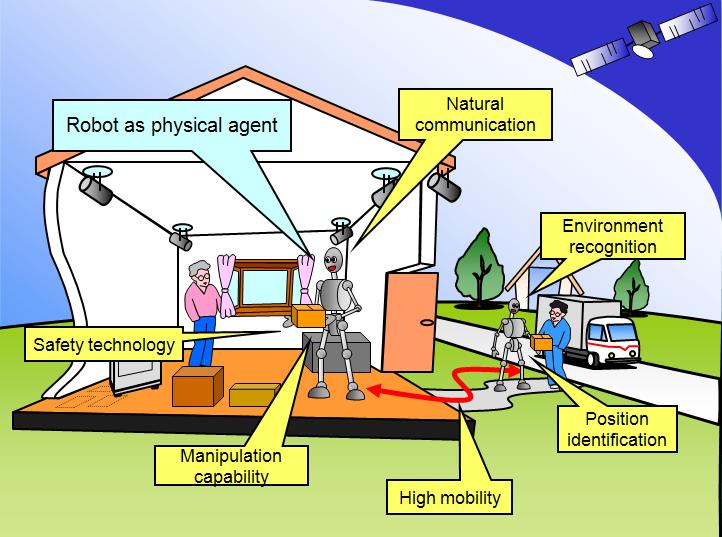
Fig. 1.1 RT service for ADL support
This research is aiming at providing RT (Robot Technology) service for ADL (Activities of Daily Living) support, and on the purpose of clarifying the influence and effectiveness of physicality and expressivity during the interaction between human beings and robots.
Fig.1.1 shows the application of RT service ADL support in the existing real environment such as families, public facilities, etc. However, it is necessary to conduct the interaction with the robot intuitively for general users as they have no idea about professional knowledge of robotics. Consequently, we propose to provide service by the biped humanoid robot with the capability of emotional expression. That is because the possibility for general use without any adjustment in the real environment due to biped walking, and the similar emotional expression as human beings, make it quite easy for users to intuitively understand.
Fig. 1.1 RT service for ADL support
In our laboratory, since 1995 the head robots of WE series had been developed, and the humanoid robot WE-4RII(Fig. 1.2) endowed with upper body and the ability to express emotion was developed in 2004. Besides, since 1996 the humanoid robots of WABIAN series had been developed, and in 2007 we developed WABIAN-2R(Fig. 1.3) with the same size of adult female and it was able to simulate human movements as walking and dance.
Furthermore, also in 2007 KOBIAN was developed with the integration of the upper body capable of emotional expression and the lower body capable of biped walking.
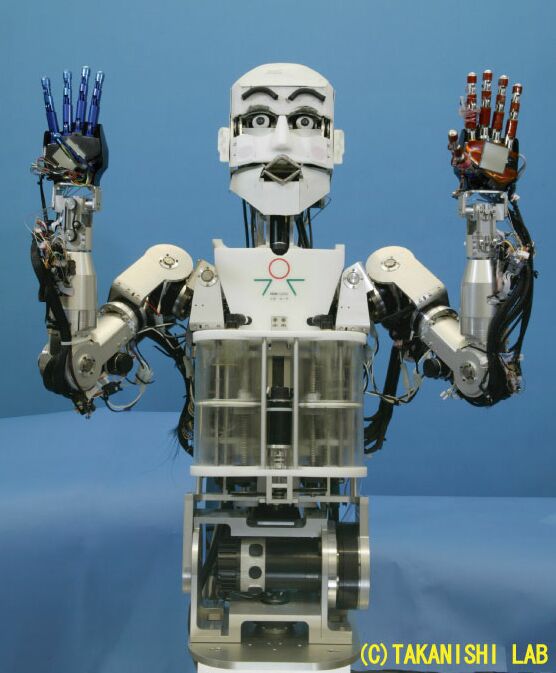
Fig. 1.2 WE-4RII |

Fig. 1.3 WABIAN-2R |
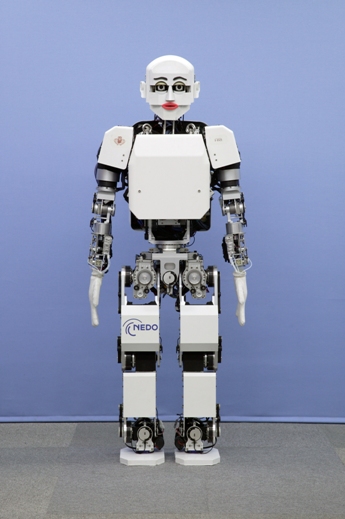
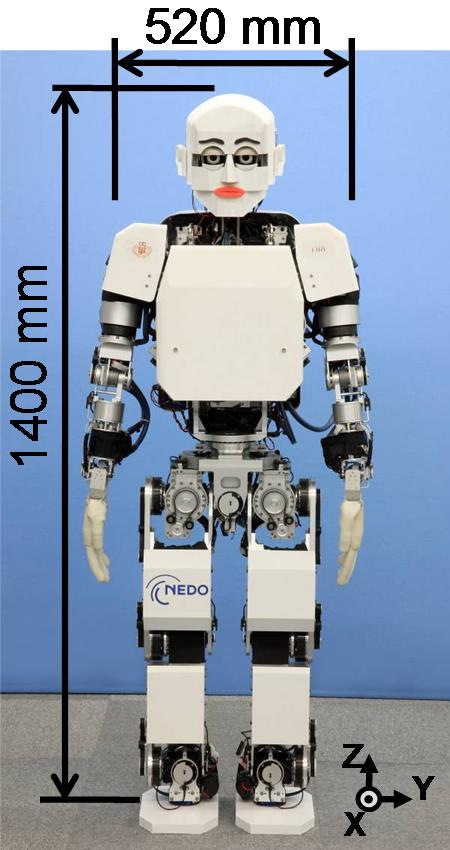
In 2007, we have developed Emotion Expression Biped Humanoid Robot KOBIAN(Fig. 2.1) It has 48-DOFs ,a lot of sensors which serve as sense organs (Visual and Cutaneous ),The computer which controls the motion,and Batteries. The total weight is 62kg.
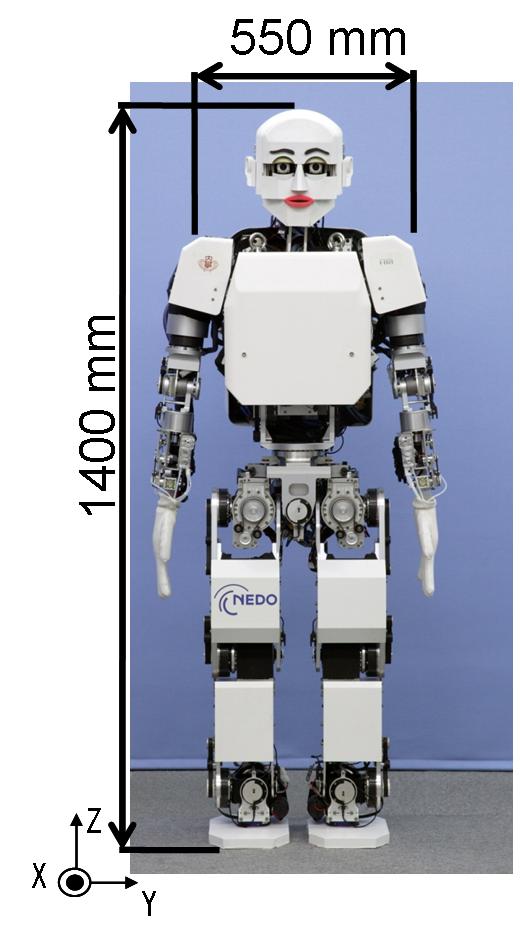
Fig. 2.1 KOBIAN |
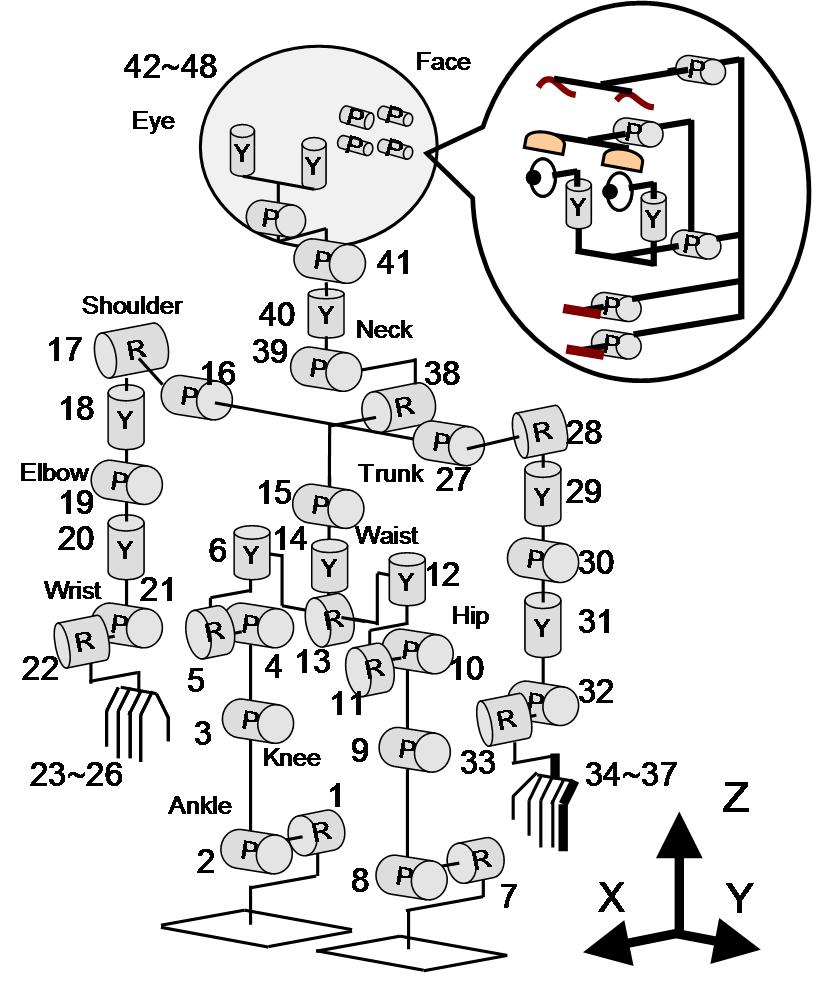
Fig. 2.2 DOF configuration |
|
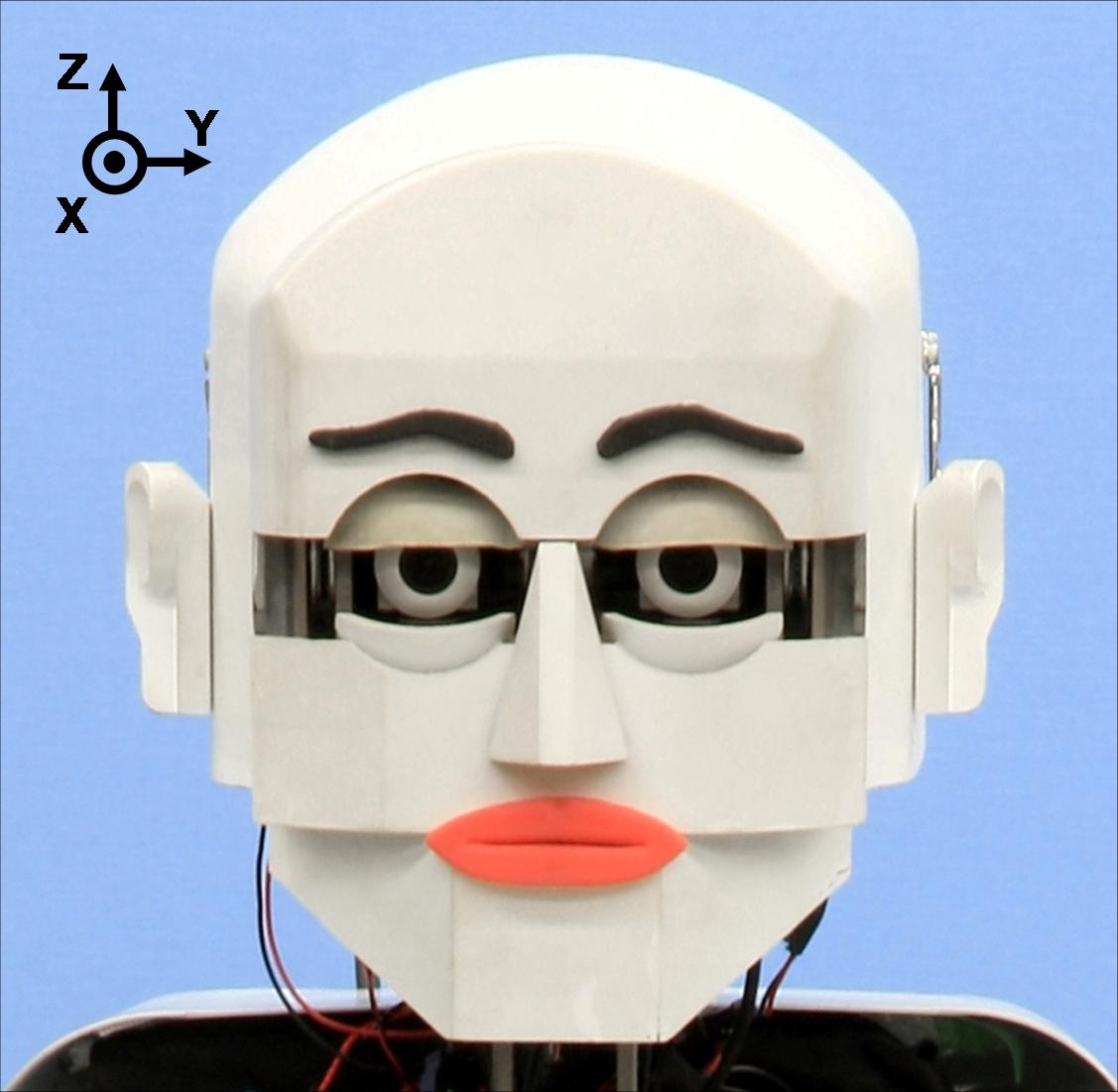
Fig. 2.3 Head Front |
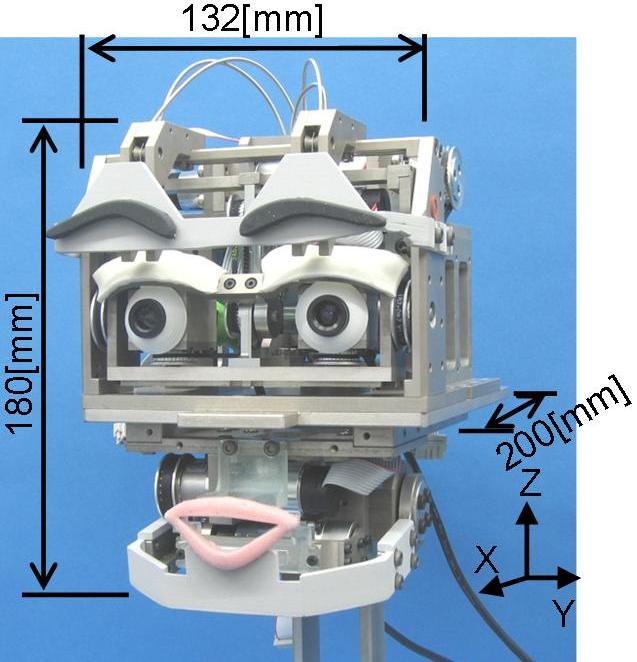
Fig. 2.4 Head Internal Structure |
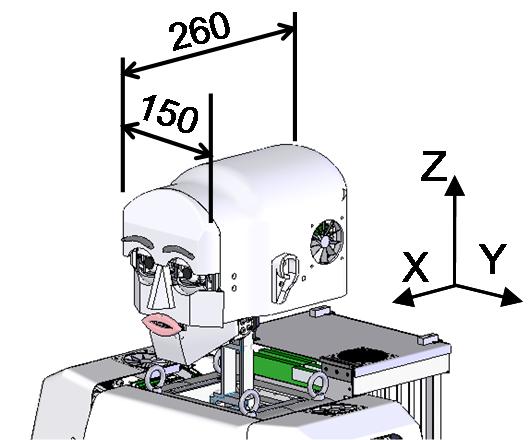
Fig. 2.5 Head Isometrics |
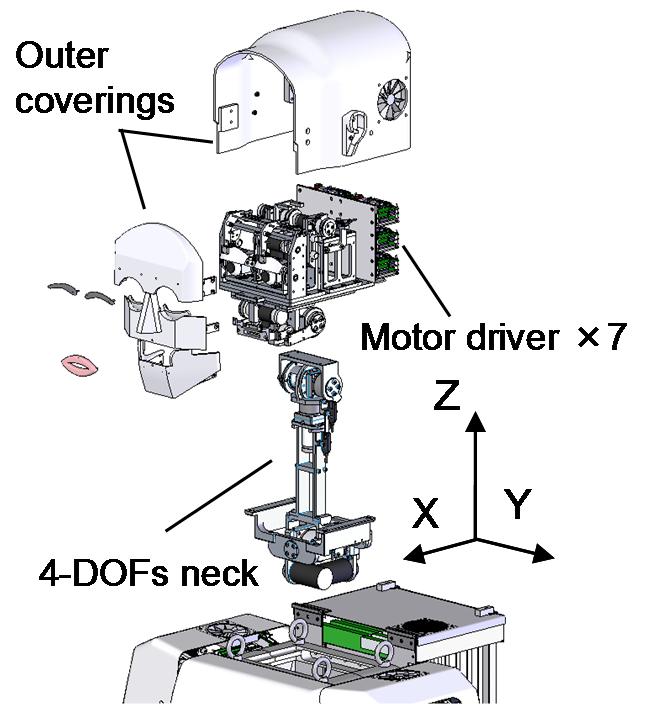
Fig. 2.6 Head Exploded View |
KOBIAN is able to express facial expressions based on the endowed organs of eyebrows, eyelids, eyes, lips and jaws.
SEPTON® with high flexibility is used in eyebrows, two sides of eyebrows are fixed, and a neodymium magnet is stuck to the center of eyebrows. The attraction between this magnet and another magnet attached by the linear motion wire inside the face, changes the relative height between two sides of eyebrows to make the eyebrows in various forms. As the same driver motors are used, symmetrical motions in the left and right are available (as shown Fig 2.7 and Fig 2.8).
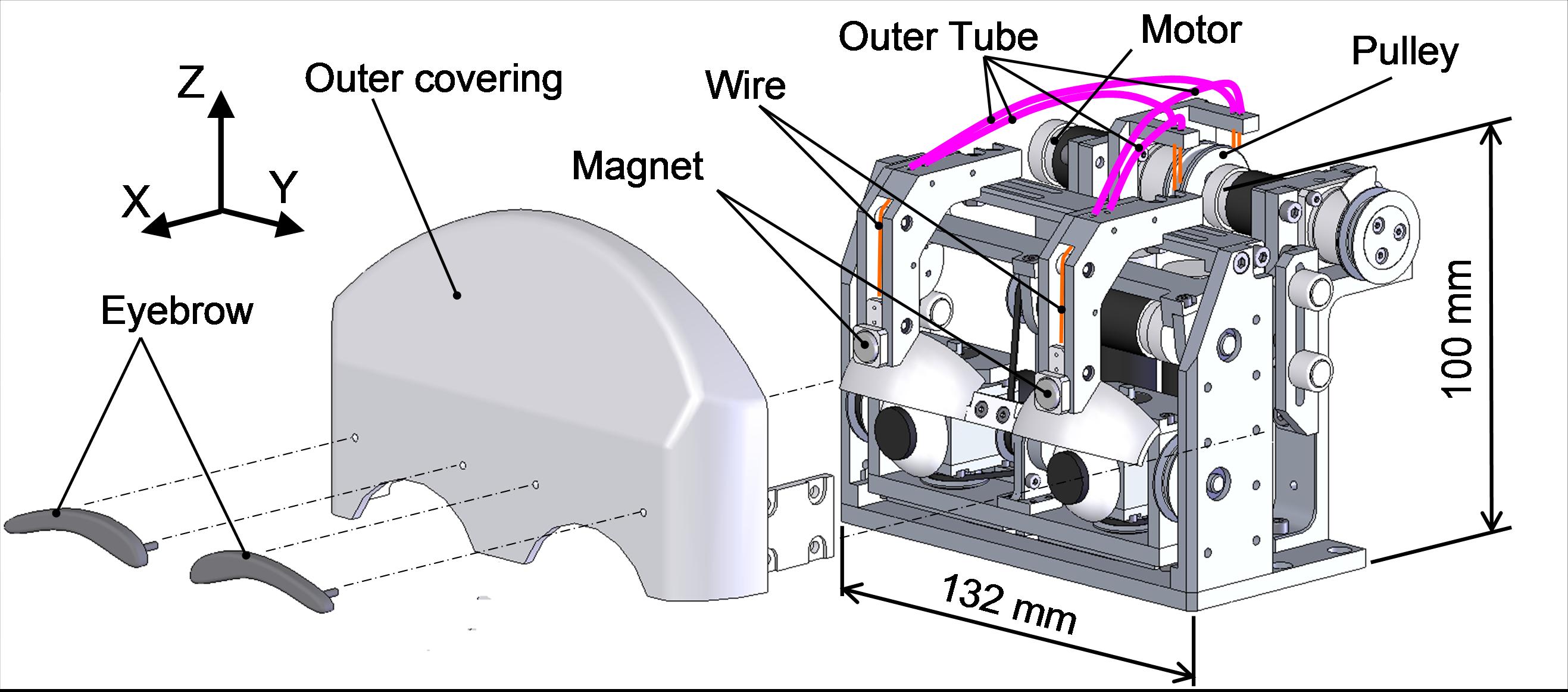
Fig. 2.7 Eyebrow Structure(1)
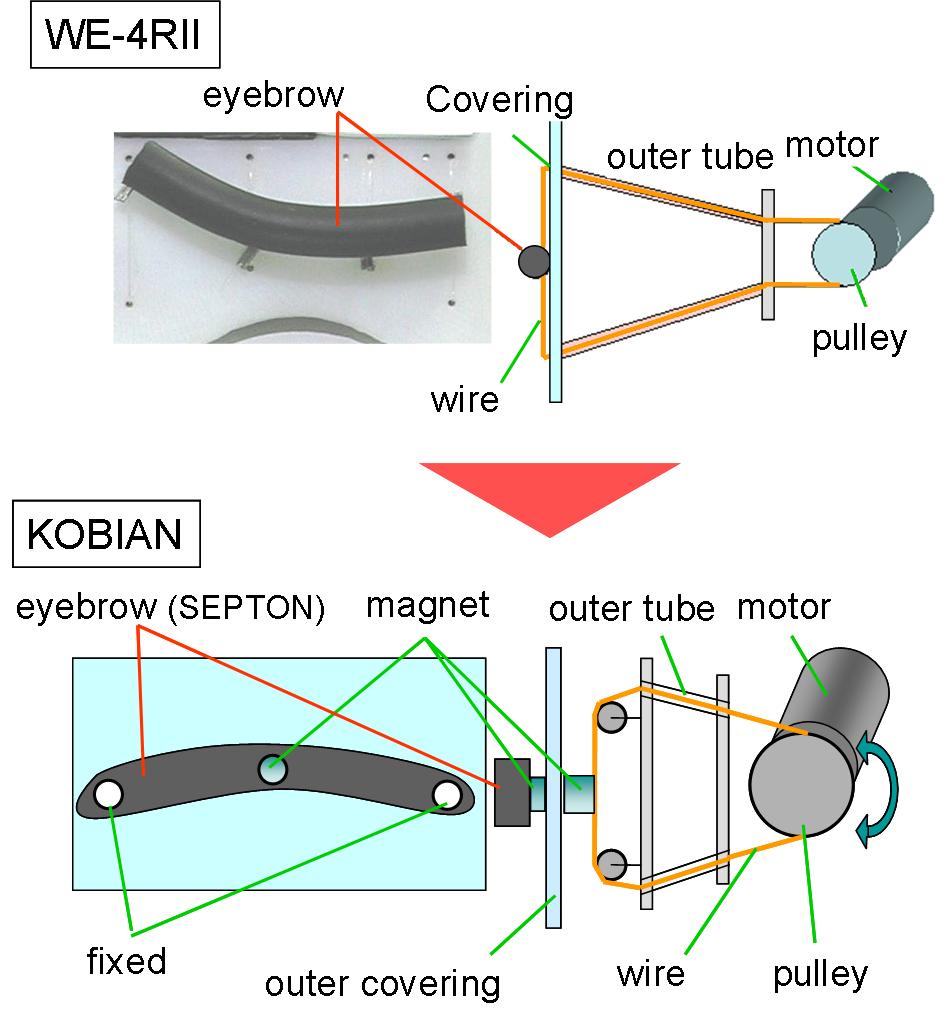
Fig. 2.8 Eyebrow Structure(2)
The pitch axis of eyelids and eyeballs are linked mechanically. Based on this, as shown in Fig. 2.9 when the eyes turn down, the eyelids will drop to form downcast eyes.
Fig. 2.9 Coordinate of Eyelid and Eyeball
SEPTON® is used in the lips as well. The center of upper lip is fixed. The lower lip is fixed in the center of the upper and lower corner of the mouth and chin. Make the lower lip up and down with the chin will change the relative fixed position and causes the shape deformed (Fig 2.10).
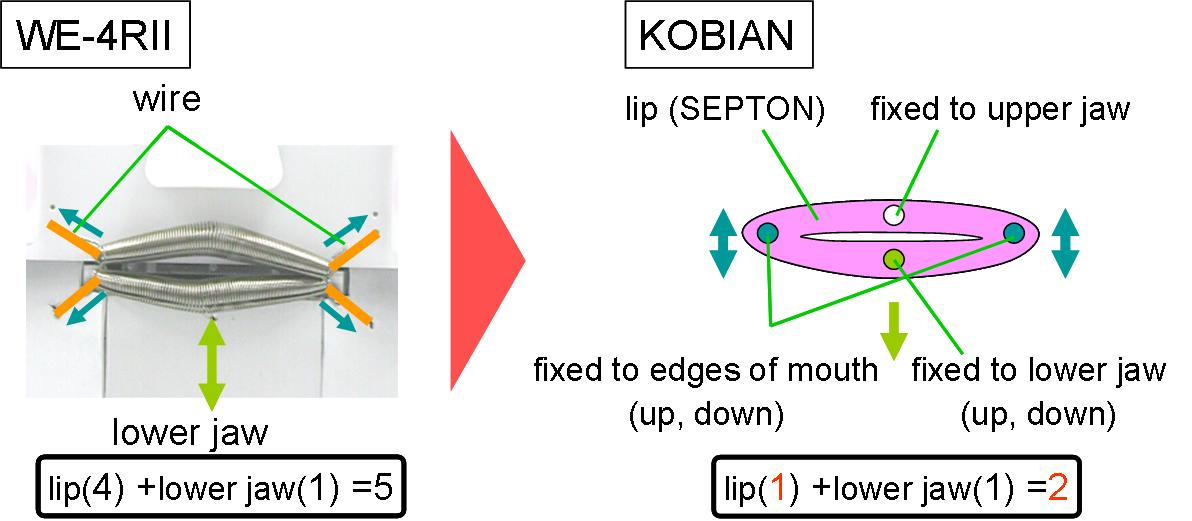
Fig. 2.10 Lips
The connection position between neck and head is set as pitch and yaw, while the connection between torso and neck is set as pitch and roll. Similarly as the WE-4RII the up and down sides of head is configured with pitch axes to enable the motion of sticking out and pulling neck when fixing the face (Fig 2.11).
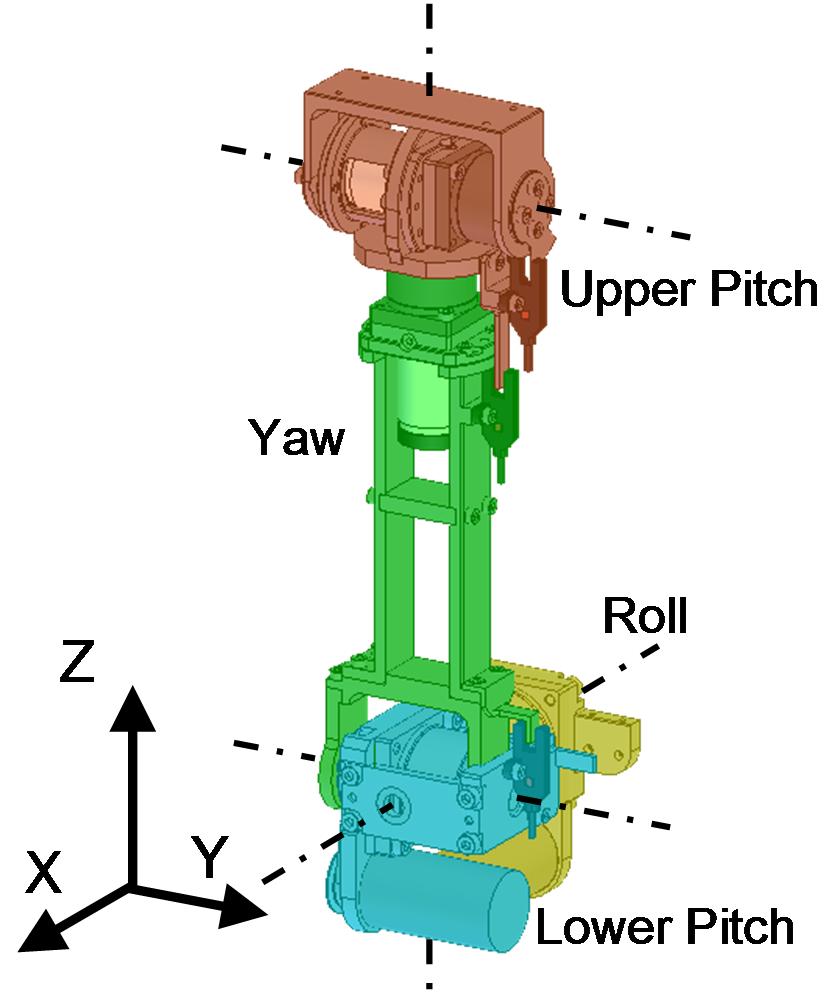
Fig. 2.11 Neck
KOBIAN has 7-DOFs Humanoid Arms. The arm consists of a shoulder part (pitch, yaw and roll axis), an elbow part (pitch axis), and a wrist part (pitch, yaw and roll axis). Because of the above-mentioned configuration, as human beings taking objects with obstacles avoidance, the robot is able to act by utilizing the redundant DOFs.
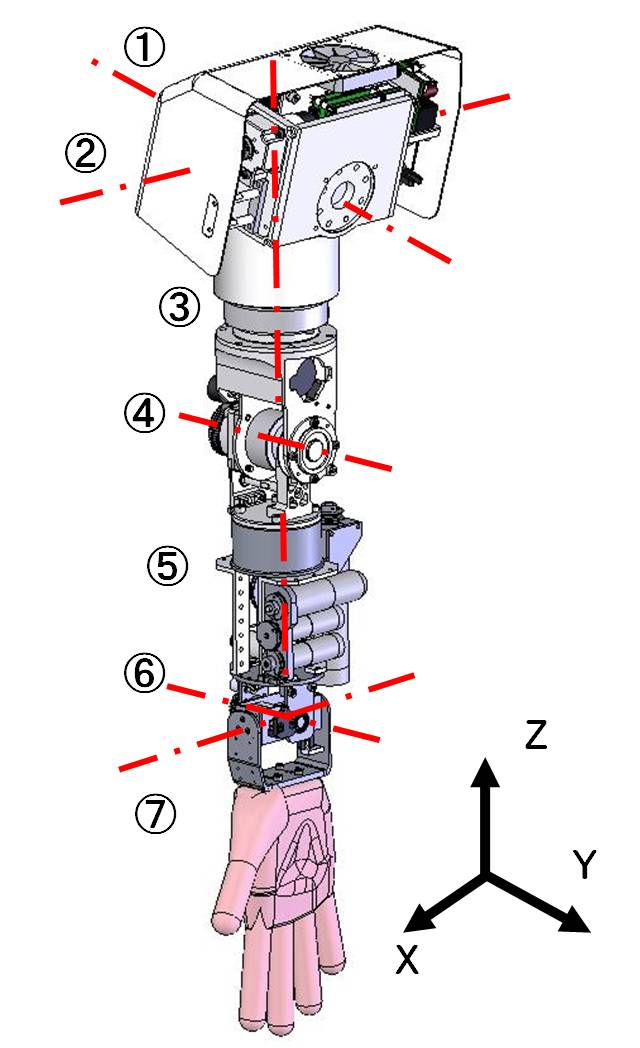
Fig. 2.12 Arms
Except for the task as grasp, hand is generally used the in communication with human being such as handshake and pointing as well. To provide ADL support service by KOBIAN, the feeling of touching the hand and safety is stressed on. In view of these concepts, the hand WSH-1 RII (Waseda Soft Hand-No.1 Refined II) made of soft materials was developed (Fig 2.13). Furthermore, to shake hands with appropriate force, WSH-1 RII is endowed with 14 sheet-like flexiforce® force sensors. (Fig. 2.14)(Fig. 2.15)
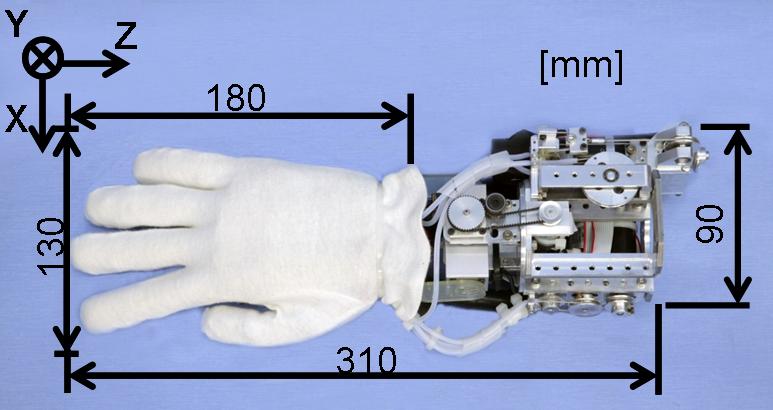
Fig. 2.13 Hands(WSH-1RII)
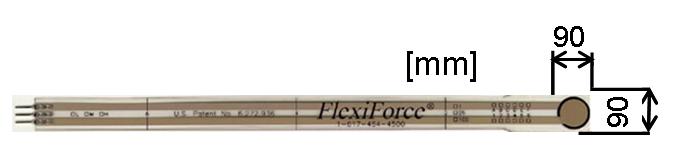
Fig. 2.14 Sheet Force Sensor FlexiForce®
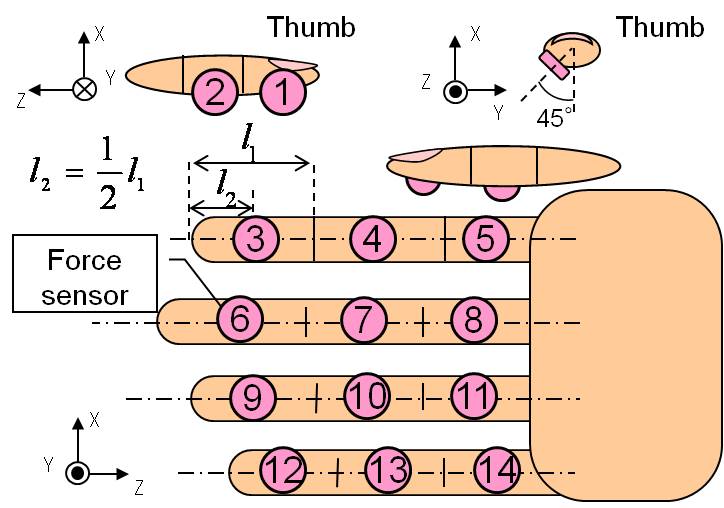
Fig. 2.15 Potison of Sensors
The palm is made of Hitohada® and the metal pipe mimicked bones is installed in it. The finger is made of silicon rubber, and covered by the Hitohada® (Fig 2.16).
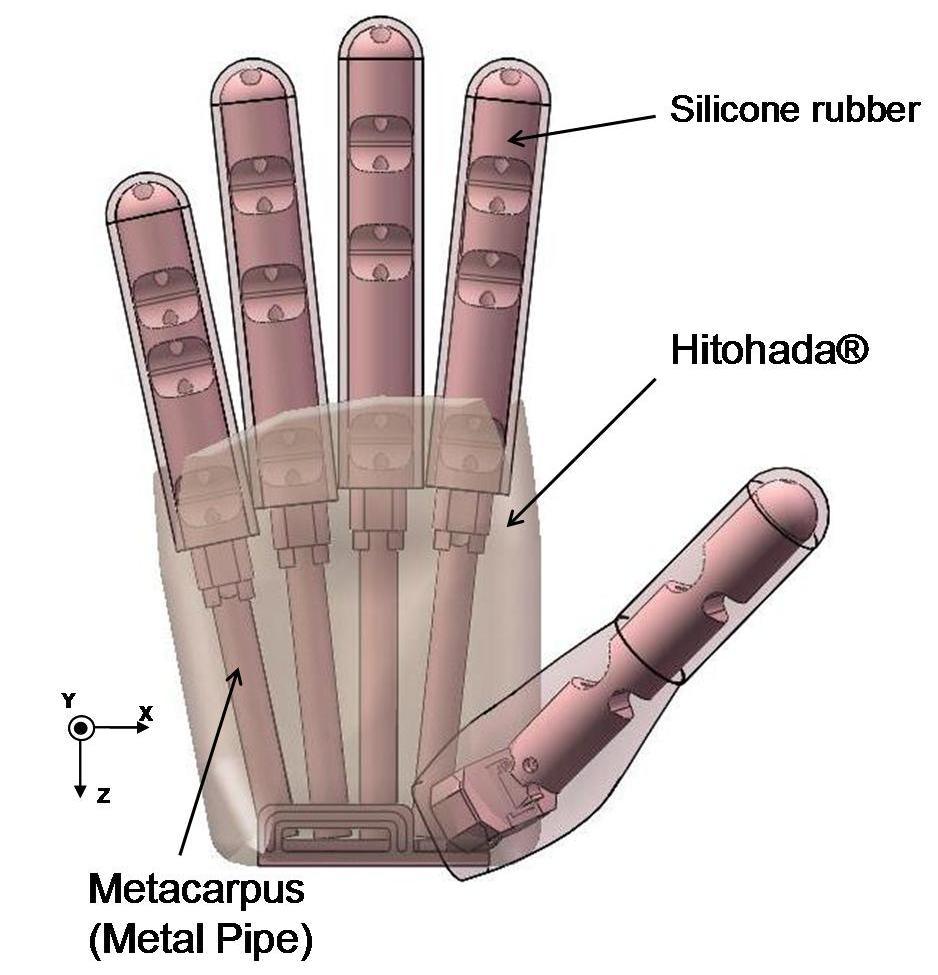
Fig. 2.16 Palm Internal Structure
As shown in Fig 2.17, the bending of each finger is drived by the underactuated wire-driving mechanism. Besides, as shown in Fig 2.18, the bending of the forefinger and middle finger, and the internal and external rotation of the thumb, is independently configured as 1 DOF respectively. While the bending of the thumb, ring finger and pinkie is configured as wire When the wire is pulled, the fingers are bent into the shape of the object as shown in Fig 2.19.The extension of ever finger is resulted from the elastic force of soft materials.
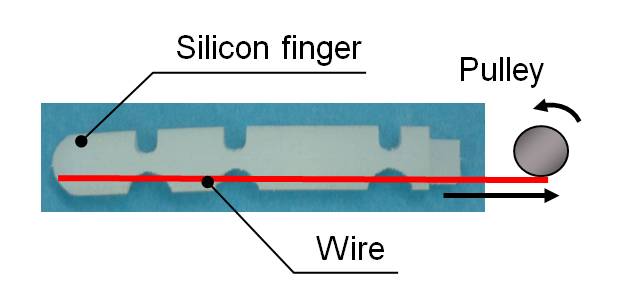
Fig. 2.17 Finger Mechanism
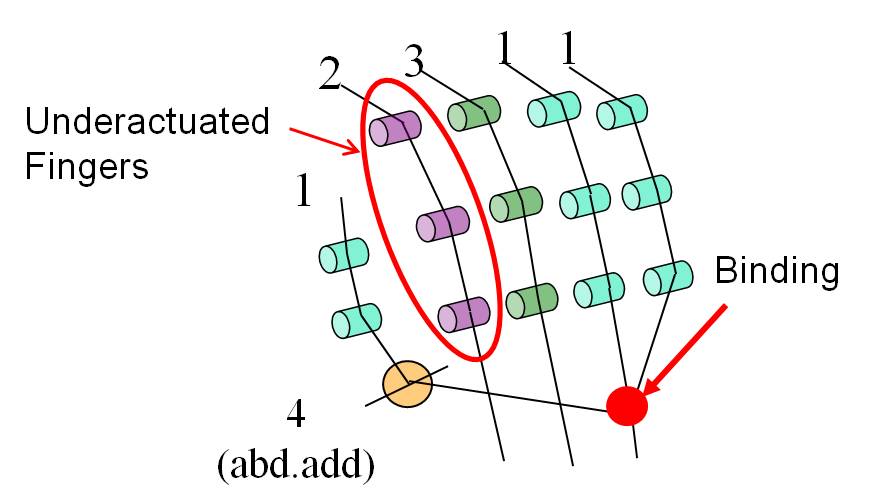
Fig. 2.18 Hands DOF configuration
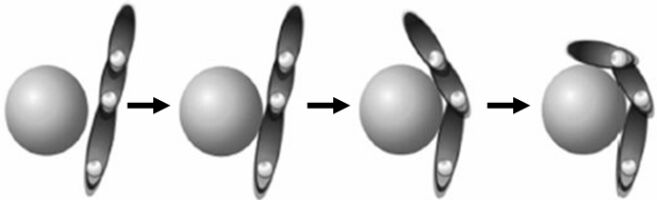
Fig. 2.19 Following Holding
In order to grasp the spherical object, humans abduct the thumb opposite to the small finger, and in case of the cylinderical grasp, we adduct the thumb opposite to the middle finger. With the internal and external rotation of the thumb implemented by 1 DOF wire-driving system, the stably grasping of objects is achieved.(Fig. 2.20, Fig. 2.21)
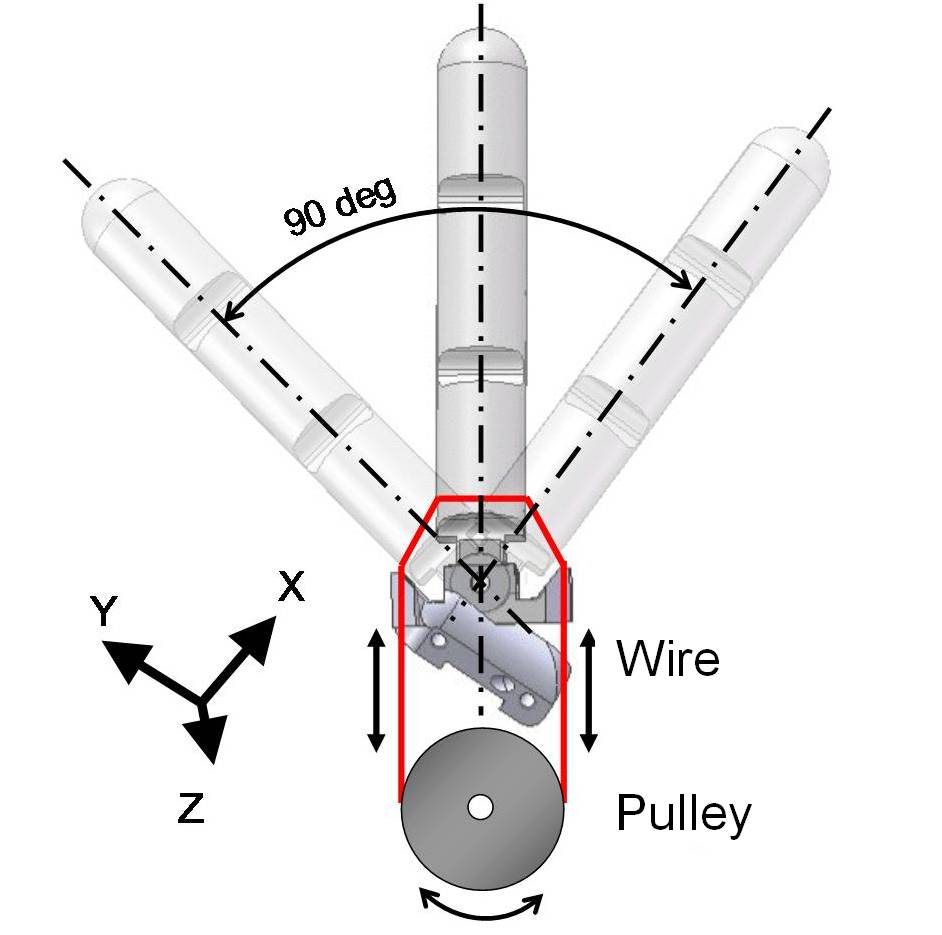
Fig. 2.20 Abduction/Adduction Mechanism |
Fig. 2.21 Abduction/Adduction |
KOBIAN has 1-DOF waist composed by pitch and yaw axes. By using the waist motion, WE-4RII can product emotional expression with not only neck but also the upper-half part of its body.
Because of the mechanical constraint, most of the biped robots perform a bent-knee gait (walk with the knees bent during walking). On the other hand, researches on human gait's analysis show that the pelvis motion plays a significant role in human's gait. (Fig. 2.22).
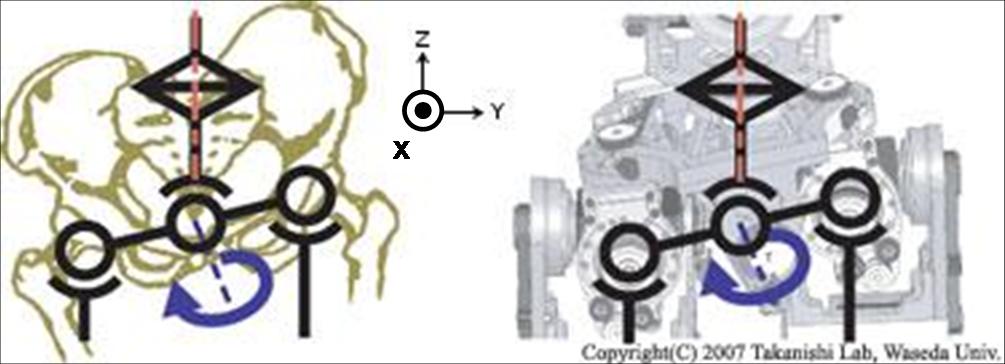
Fig. 2.22 2-DOF waist mechanism
KOBIAN has two color CMOS cameras(ARTCAM-022MINI ) made by ARTRAY in its eyes. (Fig. 2.23).

Fig. 2.23 CMOS camera
In order to measure the leg load, the 6-axis force sensor (IFS-67M25A50-I40) made by NITTA Corp. with the ability to measure the weight and moments around X, Y, Z axis is assembled in the stem feet. The measured results is employed for the stability control of walking and whole body motion (Fig 2.24).

Fig. 2.24 6-axis force/torque sensor
Fig. 2.25 shows the total system configuration of KOBIAN. The computer mounted on the trunk controls the motion of KOBIAN(CPU: Pentium M 1.6GHz, RAM: 2GB, OS: QNX Neutrino 6.3.0)
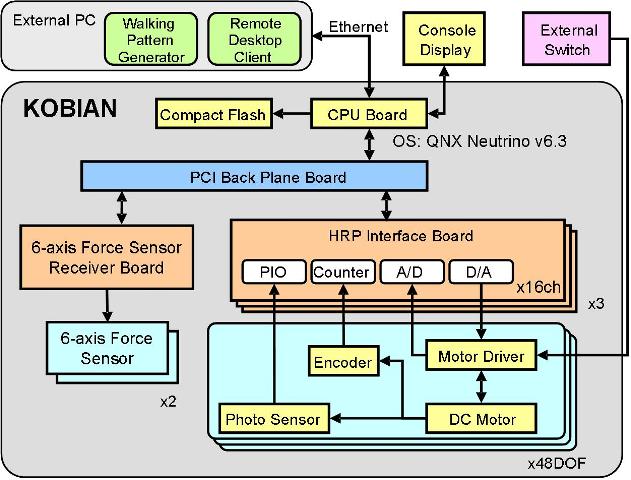
Fig. 2.25 System Configuration
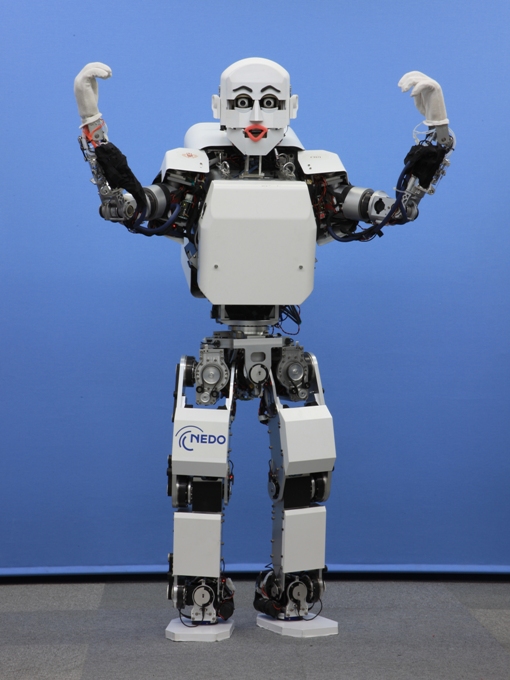
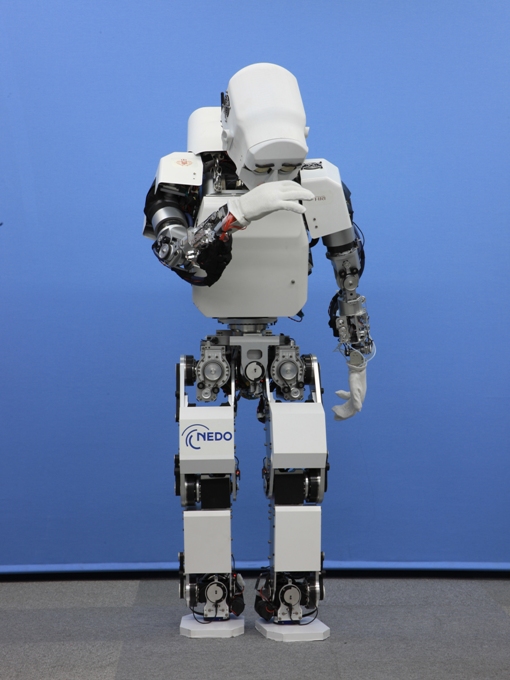
We use the Six Basic Facial Expressions of Ekman in the robot's facial control, and have defined the seven facial patterns of "Happiness", "Anger", "Disgust", "Fear", "Sadness", "Surprise", and "Neutral" emotional expressions. KOBIAN has the emotional expression patterns shown in Fig. 3.1.
|

|

|
|
| (a) Happiness | (b) Fear | (c) Surprise | (d) Sadness |

|

|
|
|
| (e) Anger | (f) Disgust | (g) Neutral | |
Fig. 3.1 Emotional Expression of KOBIAN
The position and distance of the object is recognized by the vision sensor, and the object tracking can be achieved by using the eye, head, waist, torso and feet. (Fig. 4)
Fig. 4 Object Tracking
Click the following pictures to see the demonstration videos.
|
|
|||
|
|
|
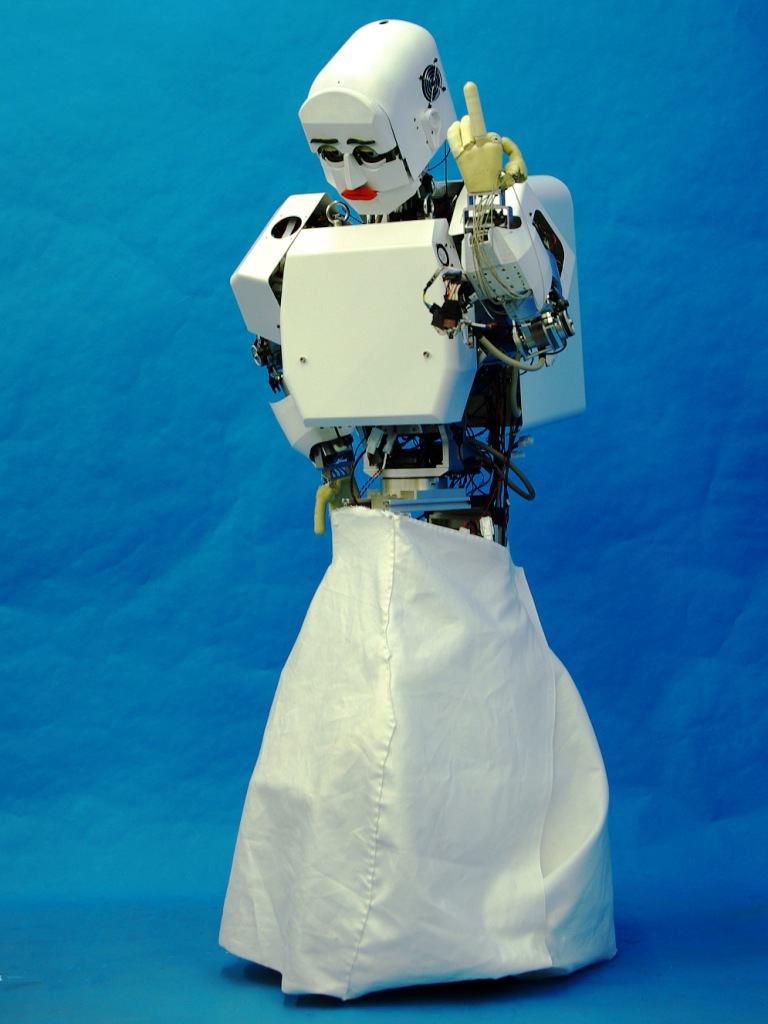
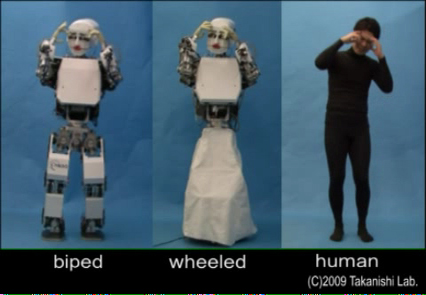
HABIAN humanoid robot is developed with the same upper body as KOBIAN, while the lower body is drived by wheels. We have evaluated and compared the impression given to observers on the different moving mechanism, and appearance and motion between KOBIAN and HABIAN. The BlackShip made by the SGI Corp., Japan is employed to develop the truck module of HABIAN. The overview of HABIAN is shown in Fig. 5.1, the DOF configuration is shown in Fig. 5.2, and the control system is shown in Fig. 5.3. The total 37 DOFs, the camera used to capture the outside view and the batteries are controlled by the PC (CPU: Pentium M 1.6GHz, RAM: 2GB, OS: QNX Neutrino 6.3.0) assembled in the back. .
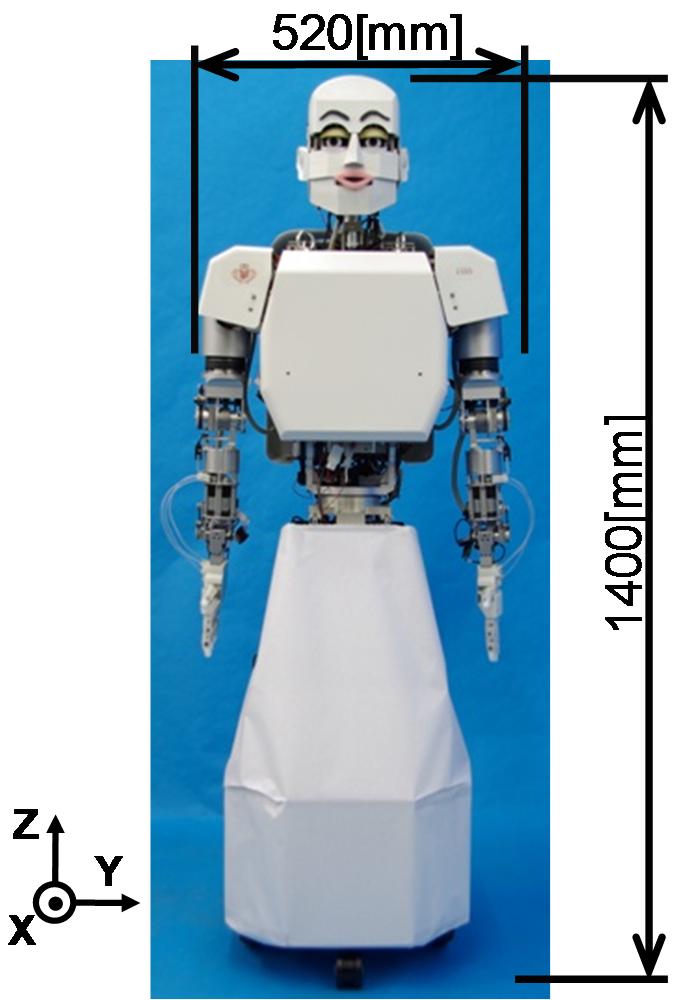
Fig. 6.1 HABIAN |
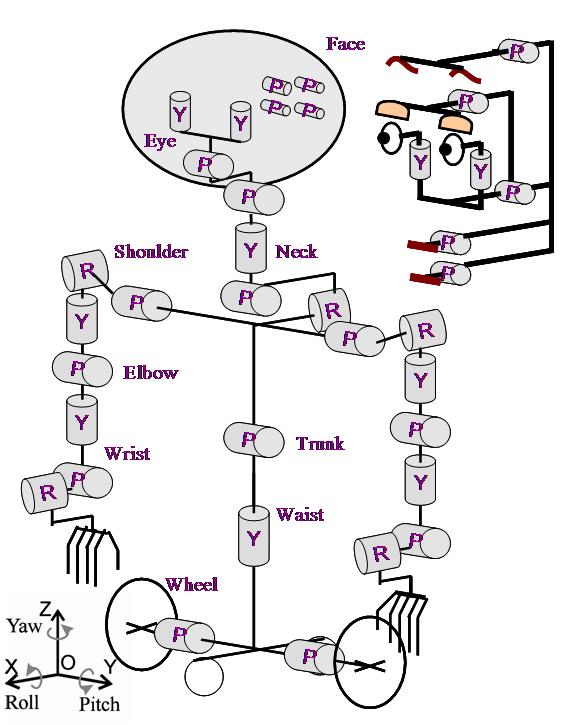
Fig. 6.2 DOF configuration |
|
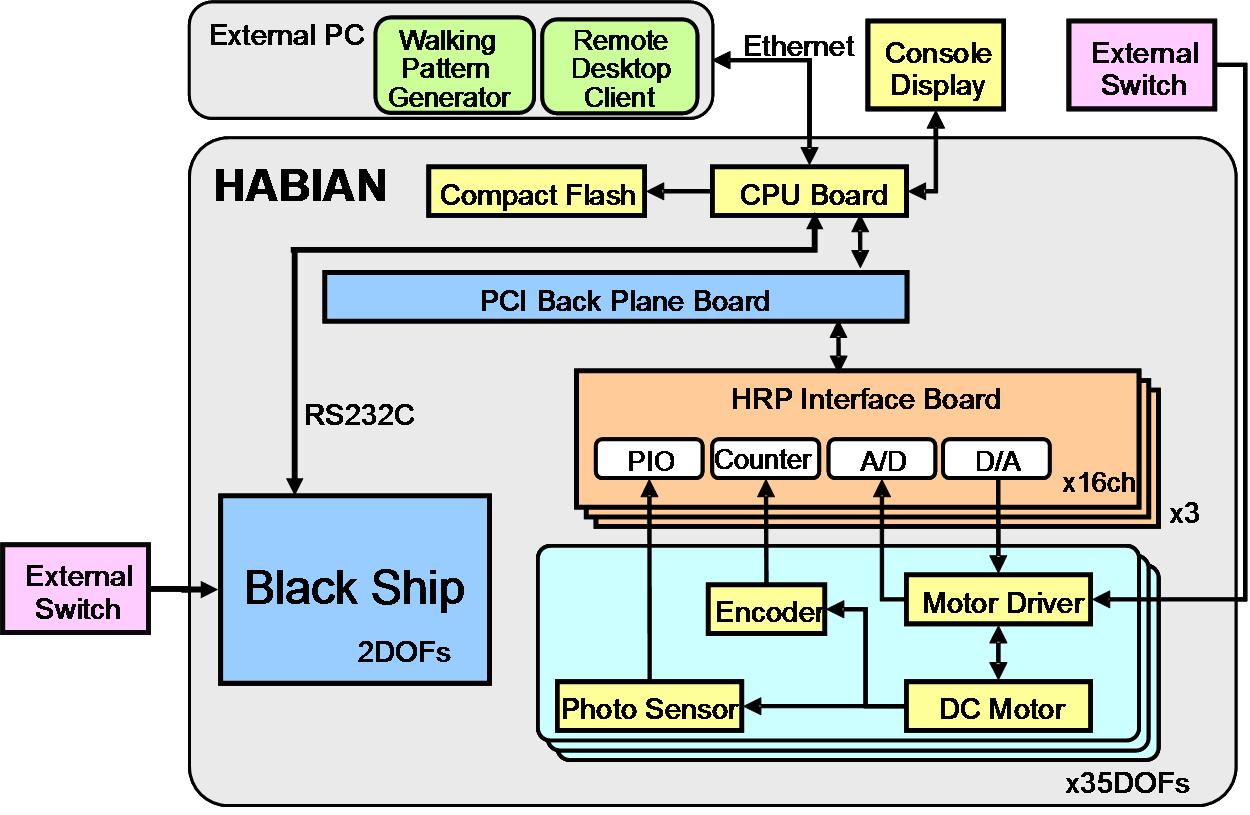
Fig. 6.3 System Configuration
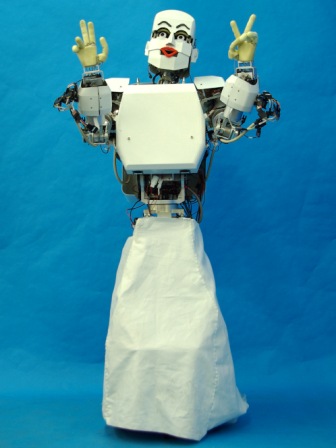
HABAIN has the emotional expression patterns shown in Fig. 3.1. .
|

|

|

|
|

|
Fig. 6.4 Emotional Expression of HABIAN
Click the following pictures to see the demonstration videos.
|
Emotional Expression(comparison) |
|
|

|
|
This work is conducted under the strategic project of developing advanced robotics technology (Ⅱ.Research project on service robot<2> communication RT system for elders) of NEDO. We gratefully acknowledge the support for this work from the "Humanoid Research Institute (HRI)" at Waseda University, RoboCasa and the Italian Ministry of Foreign Affairs, General Directorate for Cultural Promotion and Cooperation. Furthermore, this work is in part supported by the Global COE Program (Global・Robot・Academia). Finally, we also thanks to the Solid Works Corp.,Kuraray Corp., Waseda Research Institute for Science and Engineering and other corporations that attended the Humanoid Consortium held by HRI.
Last Update: 2010-07-27