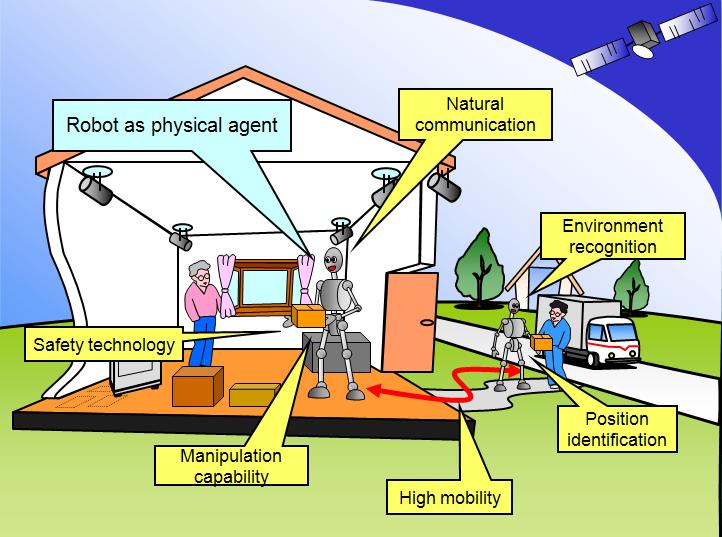
Fig. 1.1 ADL巟墖RT僒乕價僗
杮尋媶偱偼丆ADL乮Activities of Daily Living : 擔忢惗妶妶摦乯巟墖RT乮Robot Technology乯僒乕價僗偺採嫙傪栚巜偟偰丆偦偺嵺偺僀儞僞儔僋僔儑儞偵偍偗傞恎懱惈傗昞尰惈偺塭嬁傗岠壥傪尋媶丆夝柧偡傞偙偲傪栚揑偲偟偰偄傑偡丏
ADL巟墖RT僒乕價僗偱偼Fig. 1.1偵帵偡壠掚傗岞嫟巤愝側偳偺婛懚偺幚娐嫬壓偱偺塣梡偑憐掕偝傟傑偡丏傑偨丆儐乕僓偑儘儃僢僩偵娭偡傞愱栧抦幆傪帩偨側偄堦斒偺曽乆偱偁傞偨傔丆儘儃僢僩偲偺僐儈儏僯働乕僔儑儞偑捈姶揑偵峴偊傞偙偲偑昁梫偱偁傞偲峫偊傜傟傑偡丏偦偙偱丆杮尋媶偱忣摦昞弌壜擻側俀懌曕峴僸儏乕儅僲僀僪儘儃僢僩偵傛傞僒乕價僗偺採嫙傪採埬偟偰偍傝傑偡丏偙傟偼丆俀懌曕峴偱偁傞偙偲偱幚娐嫬偵庤傪壛偊傞偙偲側偔斈梡揑偵棙梡壜擻偱偁傞偙偲偲丆僸儏乕儅儞儔僀僋側忣摦昞弌偑儐乕僓偵偲偭偰捈姶揑偵棟夝偟傗偡偄偲峫偊傜傟傞偐傜偱偡丏
Fig. 1.1 ADL巟墖RT僒乕價僗
杮尋媶幒偱偼1995擭傛傝摢晹儘儃僢僩WE僔儕乕僘偺奐敪傪恑傔偰偍傝丆2004擭傑偱偵忋敿恎偺傒傪桳偡傞忣摦昞弌壜擻側僸儏乕儅僲僀僪儘儃僢僩WE-4RII(Fig. 1.2)偺奐敪傪峴偭偰偒傑偟偨丏傑偨丆1996擭傛傝奐敪傪峴偭偰偒偨俀懌曕峴僸儏乕儅僲僀僪儘儃僢僩WABIAN僔儕乕僘偱偼丆2007擭搙傑偱偵惉恖彈惈偲摨掱搙偺戝偒偝偱曕峴傗僟儞僗側偳恖懱塣摦傪僔儈儏儗乕僩偡傞偙偲偑偱偒傞WABIAN-2R(Fig. 1.3)傪奐敪偟傑偟偨丏
偦偟偰2007擭搙偵偼丆忣摦昞弌偑壜擻側忋敿恎偲俀懌曕峴偑壜擻側壓敿恎傪摑崌偟偰丆KOBIAN傪奐敪偟傑偟偨丏
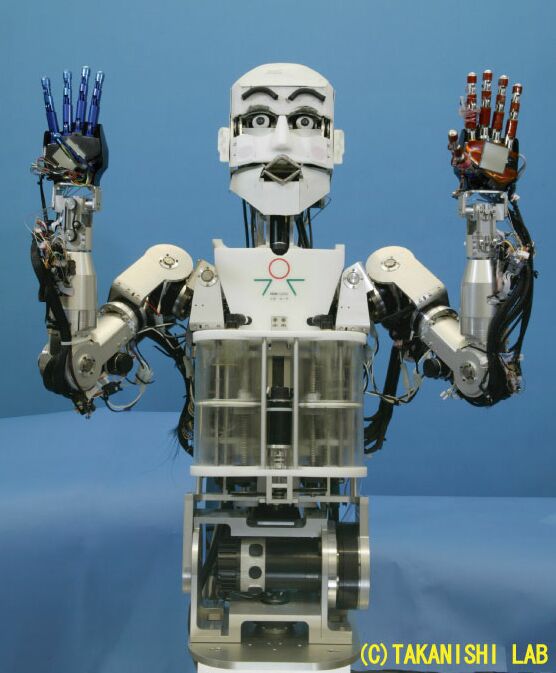
Fig. 1.2 WE-4RII |

Fig. 1.3 WABIAN-2R |
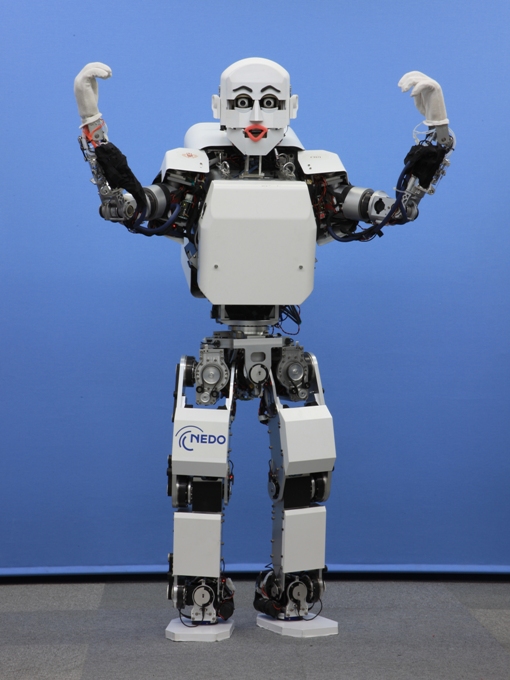
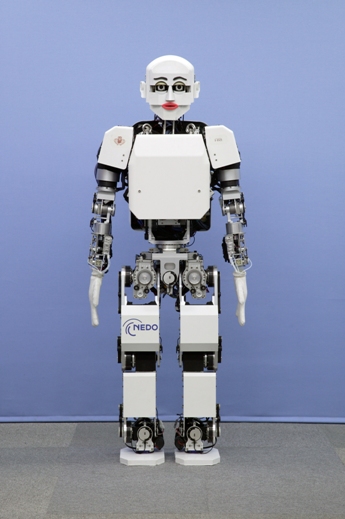
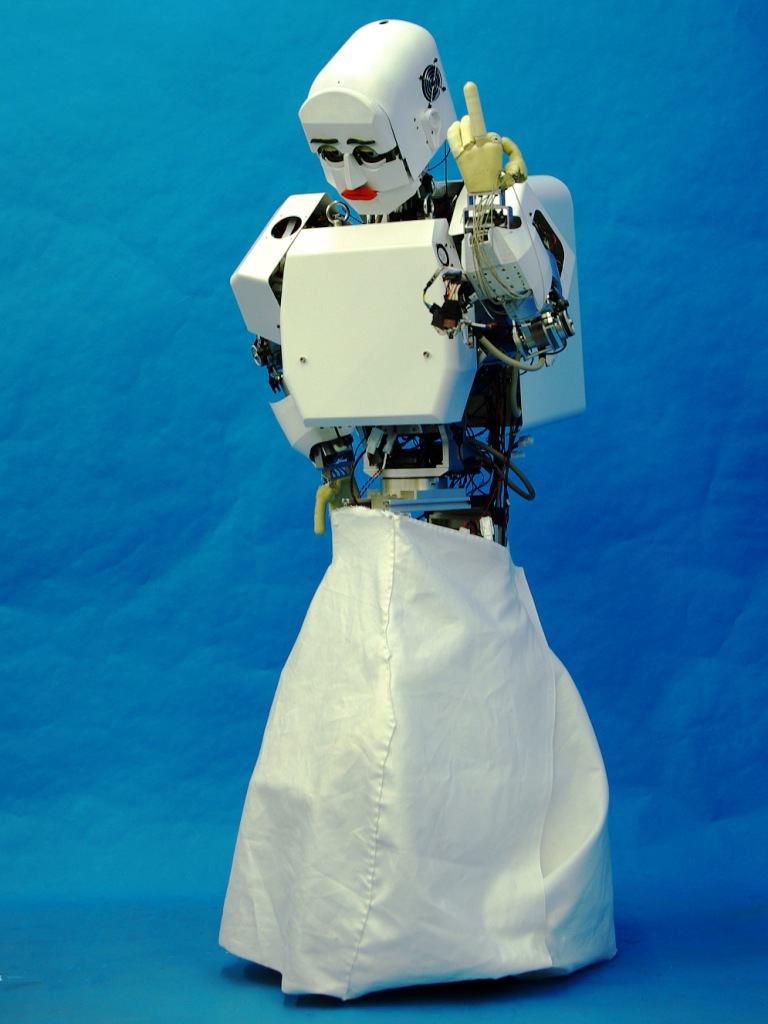
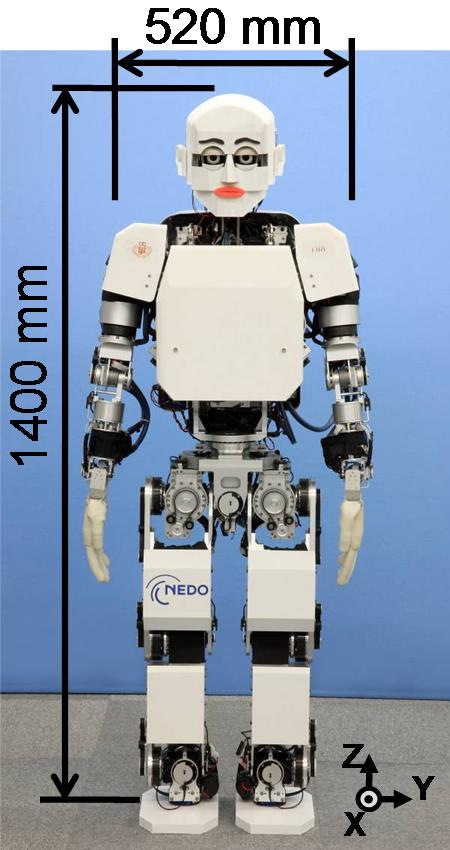
Fig. 2.1偼2007擭搙偵奐敪偟偨忣摦昞弌壜擻側俀懌曕峴儘儃僢僩KOBIAN偱偡丏KOBIAN偼Fig. 2.2偵帵偡傛偆偵慡48帺桼搙傪桳偟偰偍傝丆 奜奅傪懆偊傞偨傔偺僇儊儔丆僴儞僪偵偰暔傪揔愗偵攃帩偡傞偨傔偺椡僙儞僒丆惂屼梡偺PC傗僶僢僥儕側偳偑搵嵹偝傟偰偄傑偡丏慡廳検偼丆62乵kg乶偱偡丏
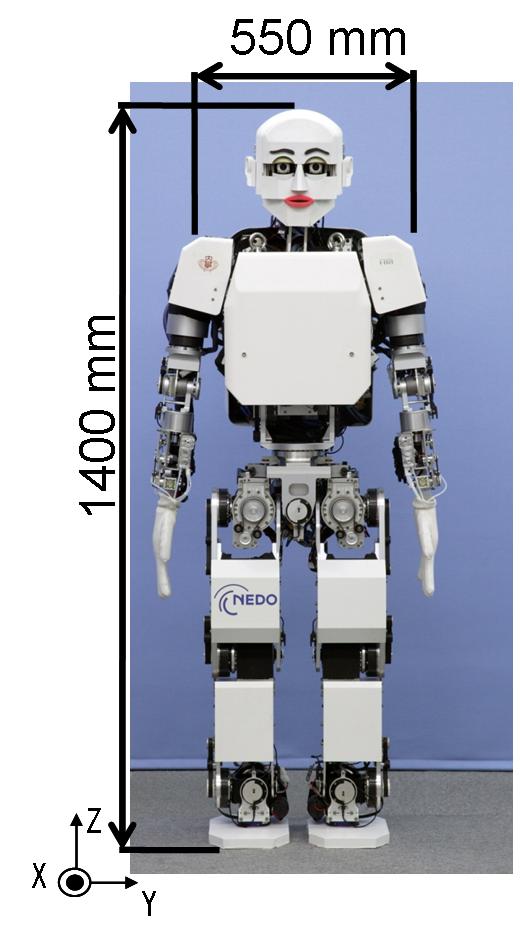
Fig. 2.1 KOBIAN |
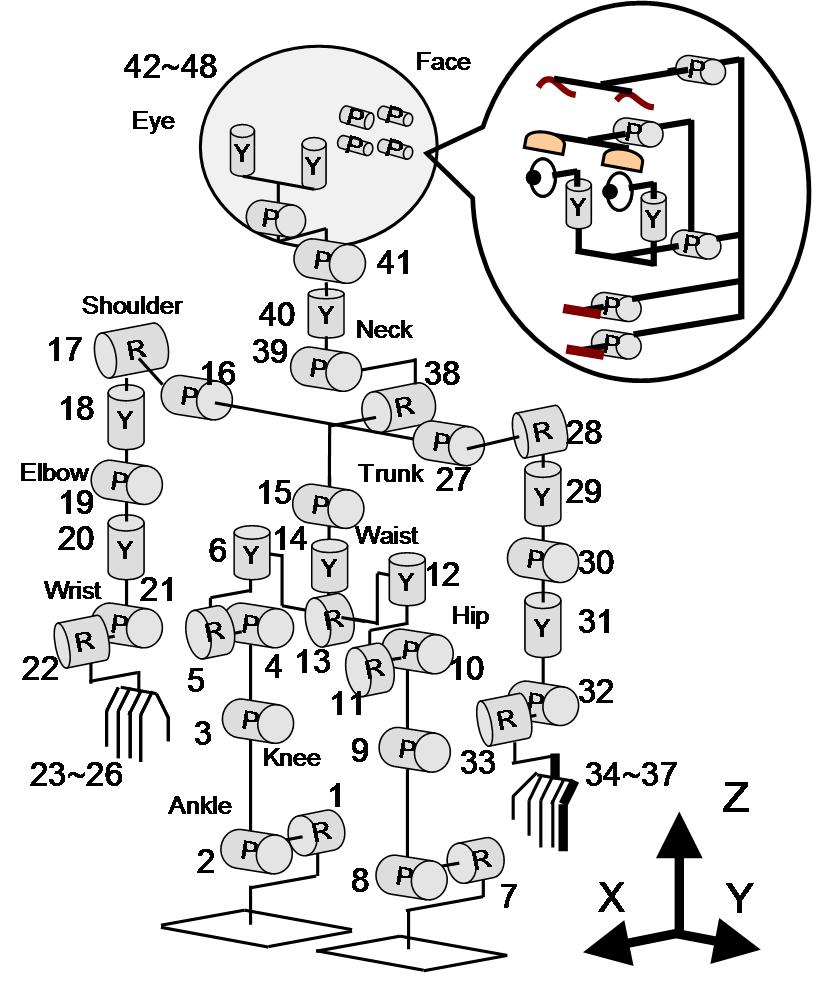
Fig. 2.2 帺桼搙攝抲恾 |
|
摢晹偼昞忣昞弌偺偨傔偵7帺桼搙傪桳偟偰偄傑偡丏偙傟傜偵傛傝丆妠偺奐暵丆岥妏偺忋壓摦(嵍塃懳徾)丆嵍塃娽媴(僇儊儔搵嵹)偺僺僢僠夞揮(楢摦)丆嵍塃娽媴偺儓乕夞揮丆娽豳偺奐暵丆旣拞墰晹偺忋壓摦偑壜擻偲側偭偰偄傑偡丏摢晹偍傛傃撪晹峔憿傪Fig. 2.3 乣 2.6 偵帵偟傑偡.
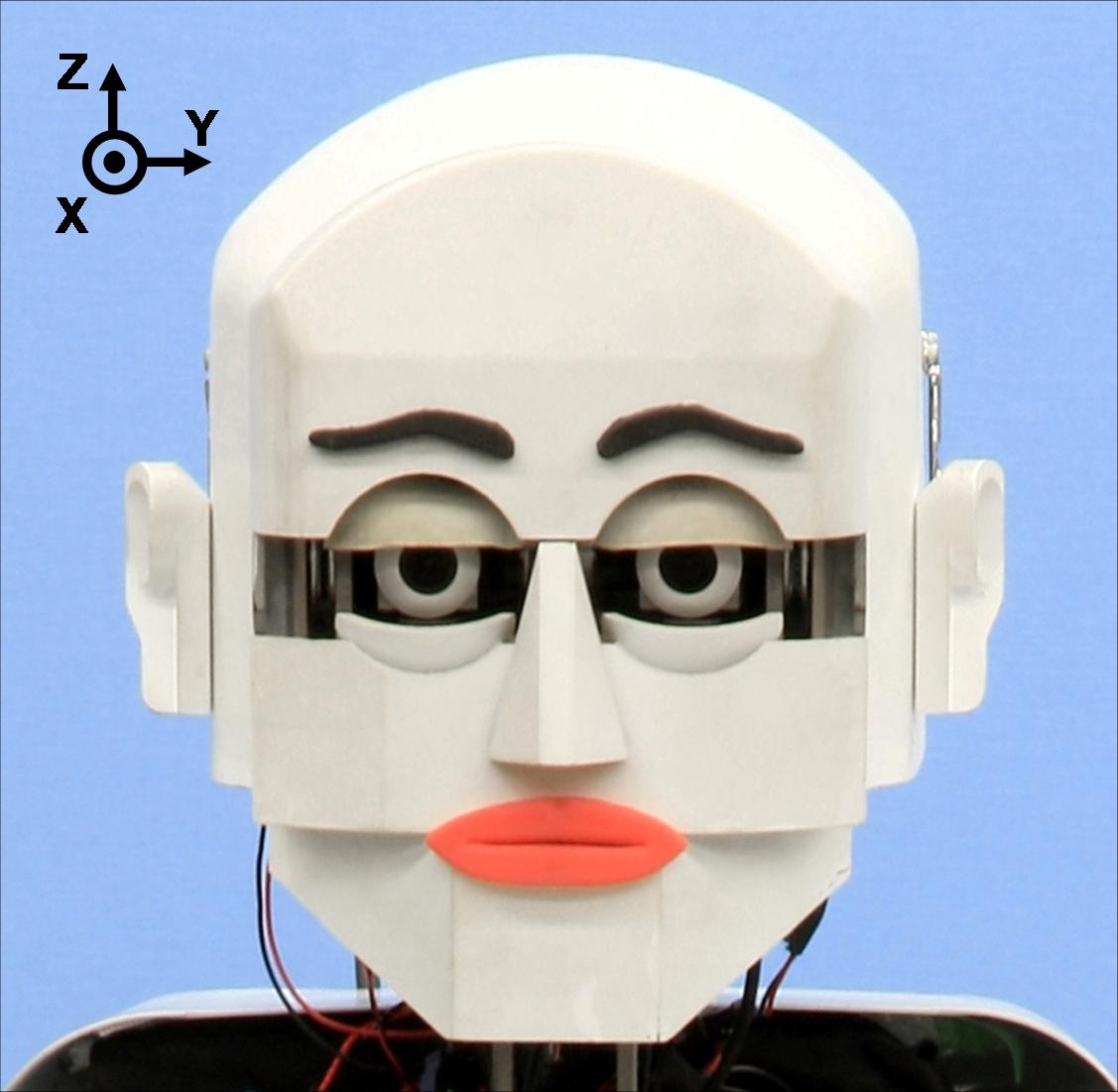
Fig. 2.3 摢晹惓柺 |
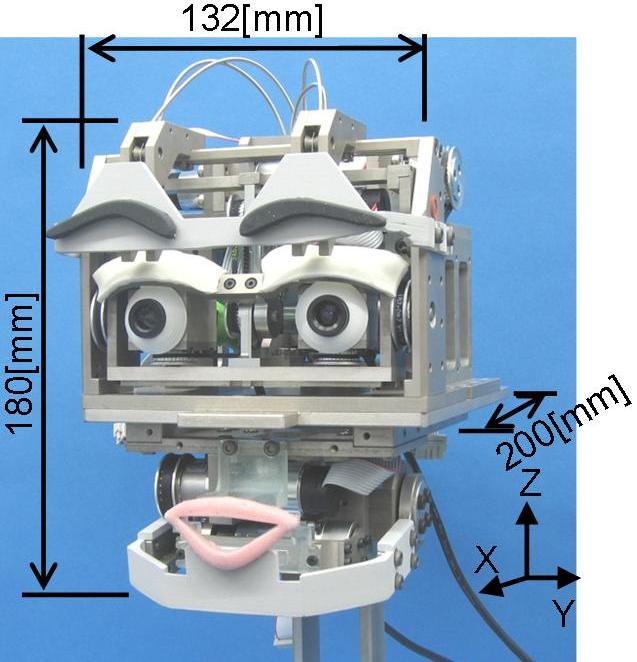
Fig. 2.4 摢晹撪晹峔憿 |
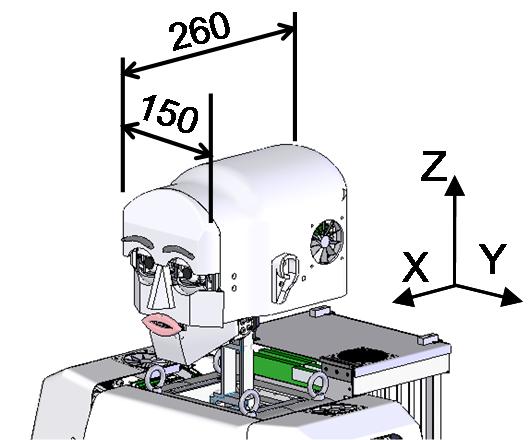
Fig. 2.5 摢晹傾僀僜儊恾 |
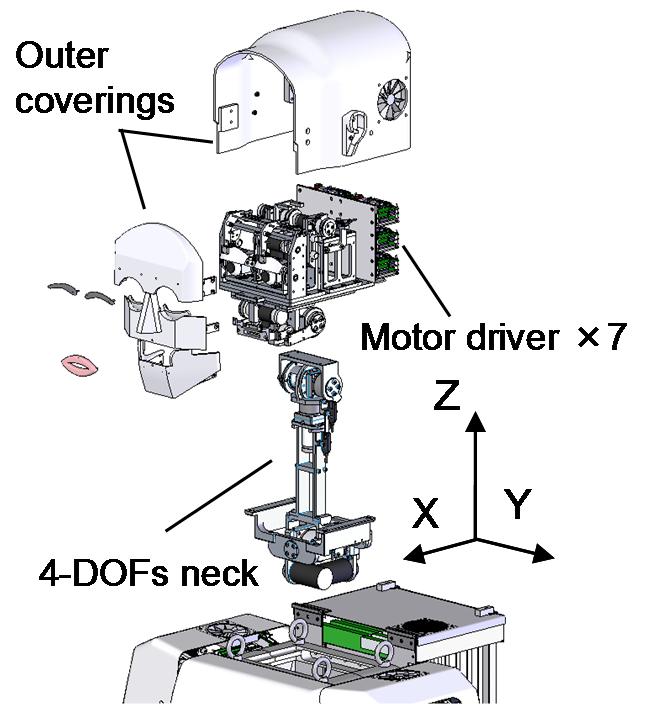
Fig. 2.6 摢晹暘夝恾 |
KOBIAN偼旣丒娽豳丒栚丒岥怬丒妠偵傛傞昞忣昞弌偑壜擻偱偡丏
旣偵偼怢弅惈偑崅偄僙僾僩儞®傪巊偭偰偍傝丆旣偺椉抂偼屌掕偝傟丆旣拞墰晹偵偼僱僆僕僂儉帴愇偑愙拝偝傟偰偄傑偡丏偙偺帴愇傪婄柺撪懁偺捈摦偡傞儚僀儎偵庢傝晅偗傜傟偨傕偆堦偮偺帴愇偱堷偒偮偗傞偙偲偱丆旣椉抂偵懳偡傞憡懳揑側崅偝傪曄摦偝偣丆旣偼條乆側宍忬傪偲傝傑偡丏嬱摦偡傞儌乕僞偼嵍塃偱嫟捠偺偨傔丆嵍塃懳徧偺摦嶌偑壜擻偲側偭偰偄傑偡乮Fig. 2.7, Fig. 2.8乯丏
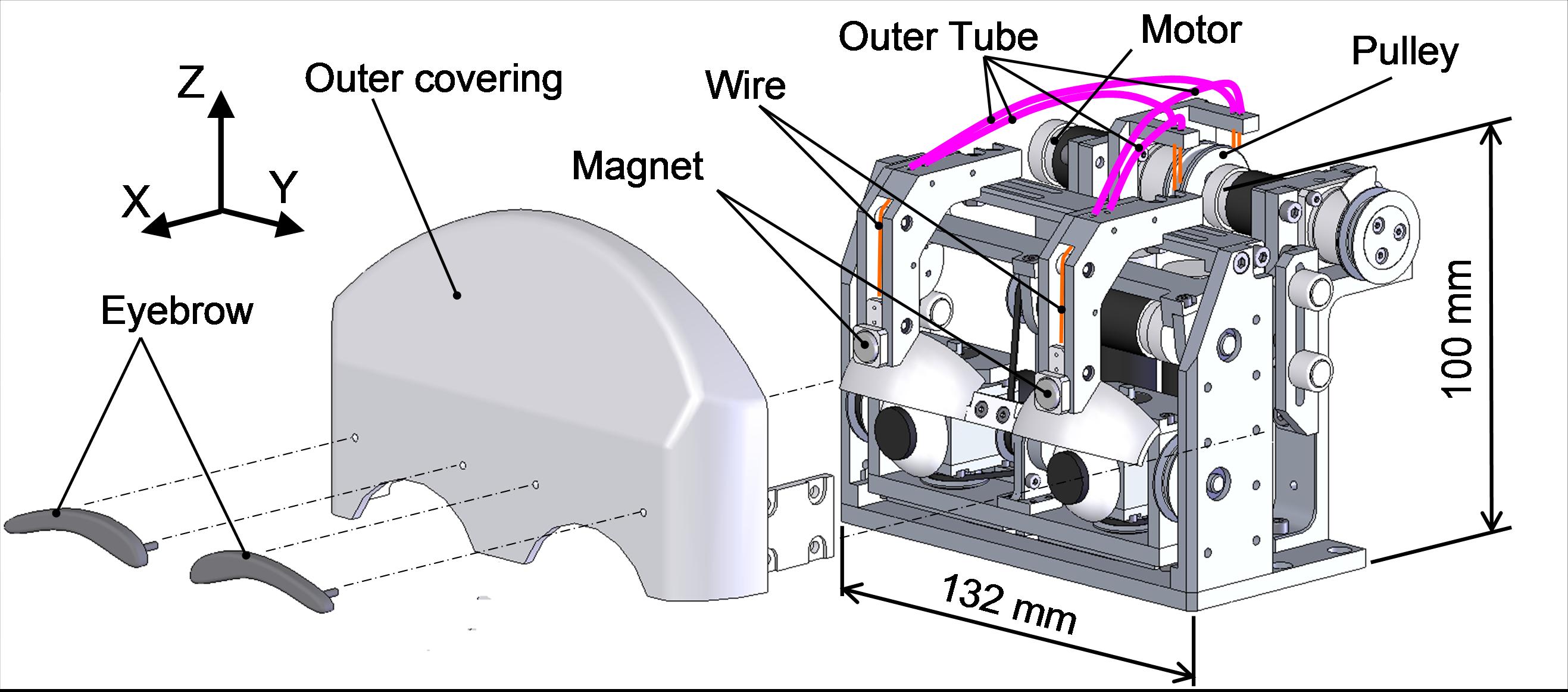
Fig. 2.7 旣偺峔憿(1)
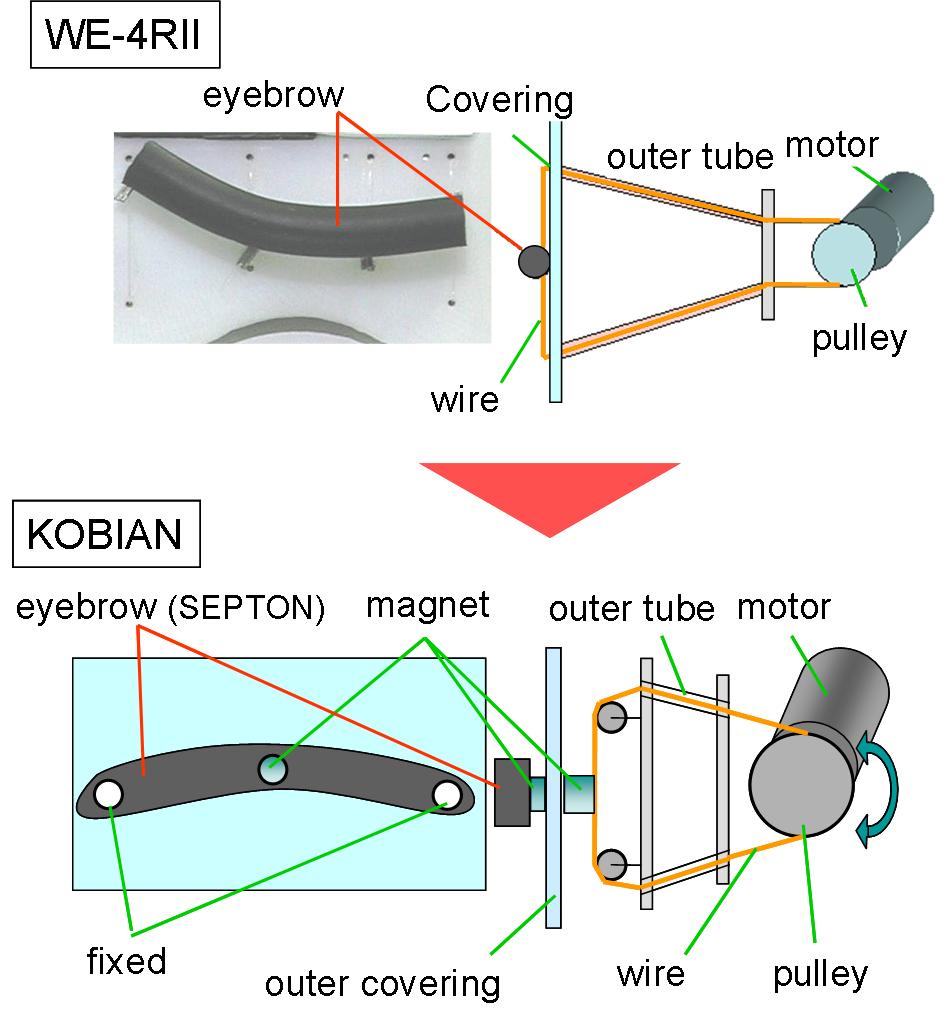
Fig. 2.8 旣偺峔憿(2)
娽豳丆娽媴偺僺僢僠幉偼婡夿揑偵楢摦偟傑偡丏偙傟偵傛傝丆椺偊偽栚傪壓偵岦偗傞偲娽豳偑帺慠偵壓傝偰暁偟栚偵側傝傑偡(Fig. 2.9)丏
Fig. 2.9 娽豳偲娽媴偺楢摦
岥怬偵傕僙僾僩儞®傪巊梡偟偰偄傑偡丏忋怬偺拞墰傪屌掕偟丆岥妏偺忋壓偲壓妠偵拞墰傪屌掕偝傟偨壓怬傪壓妠偛偲忋壓偡傞偙偲偱丆憡懳揑偵屌掕埵抲傪曄偊偰曄宍偟傑偡丏嵍塃偺岥妏偼楢摦偟偰忋壓偟傑偡乮Fig. 2.10乯丏
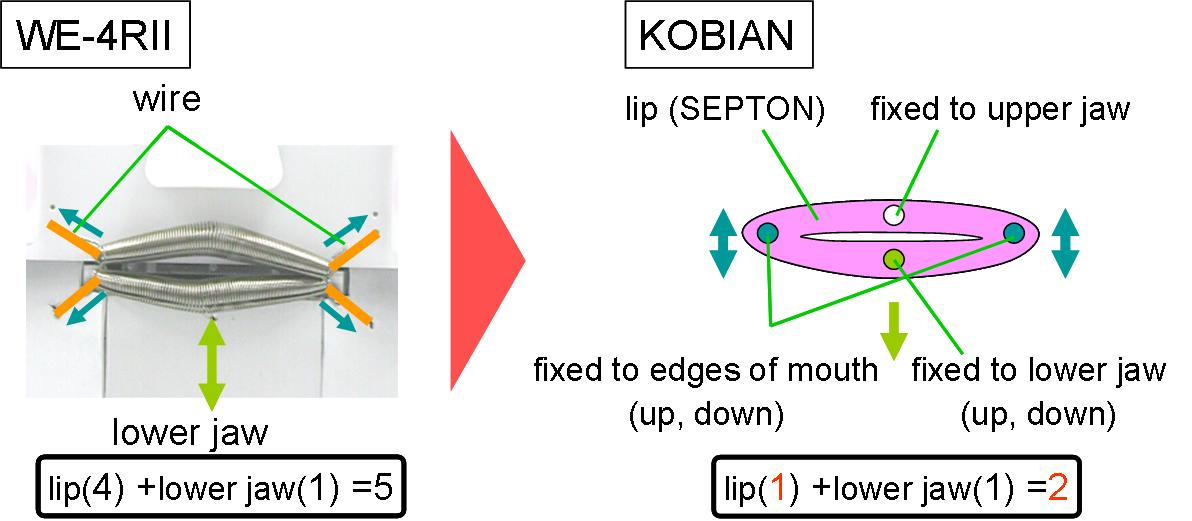
Fig. 2.10 岥怬
庱晹偼摢晹偲偺愙懕埵抲偵僺僢僠偲儓乕丄傑偨摲懱偲偺愙懕埵抲偱偺僺僢僠偲儘乕儖偺4帺桼搙偲側偭偰偄傑偡丏 WE-4RII偲摨條庱偺忋壓椉抂偵僺僢僠幉傪帩偨偣傞偙偲偱丆婄偺岦偒傪屌掕偟偨傑傑庱傪撍偒弌偟偨傝丆堷偄偨傝偡傞摦偒偑壜擻偱偡丏乮Fig. 2.11乯
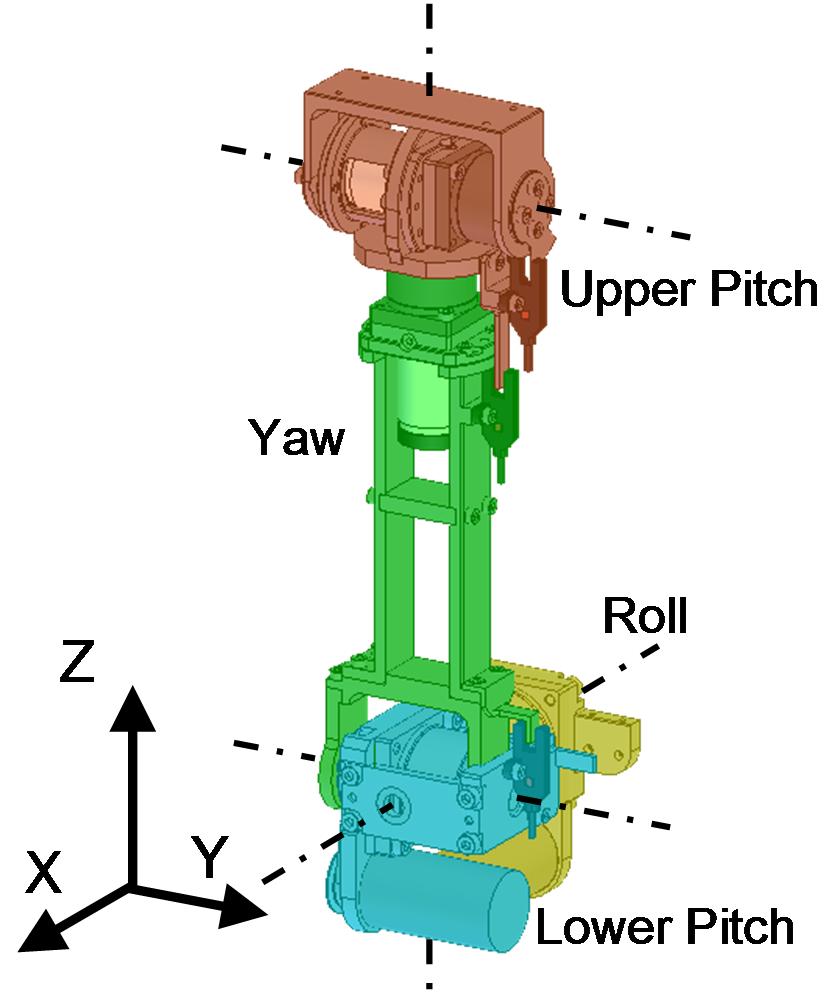
Fig. 2.11 庱晹
尐偺儘乕儖丆僺僢僠丆儓乕偲旾偺僺僢僠丆偍傛傃庤庱偺儘乕儖丆僺僢僠丆儓乕偺曅榬7帺桼搙傪桳偟偰偄傑偡丏 偙傟偵傛傝丆恖娫偲摨條偵忈奞暔傪旔偗偰暔傪庢傞側偳偺丆忕挿帺桼搙傪惗偐偟偨摦嶌傪偡傞偙偲偑壜擻偱偡(Fig. 2.12)丏
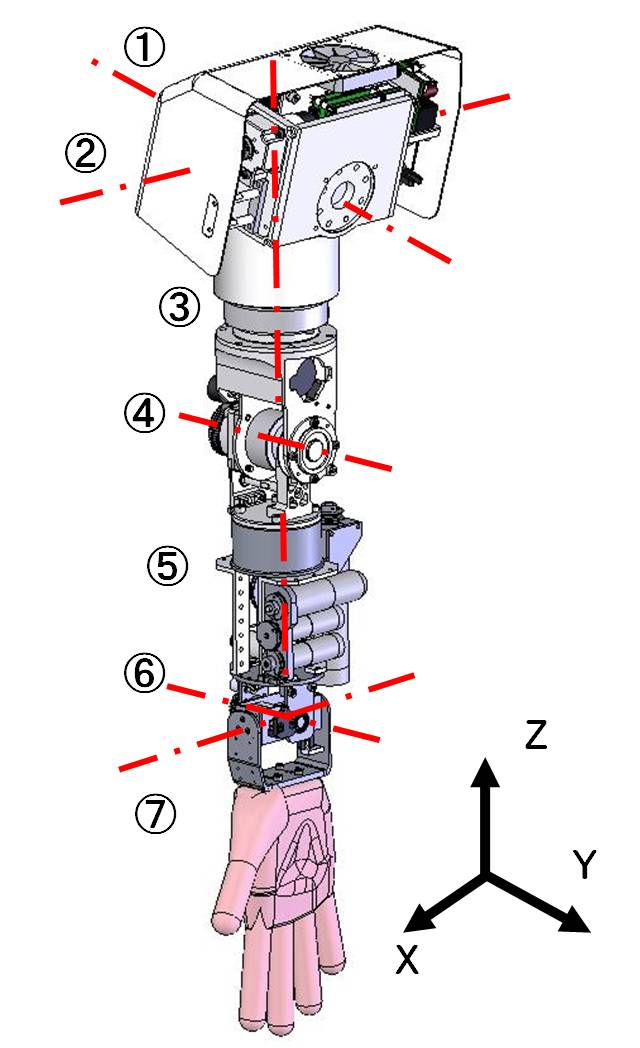
Fig. 2.12 榬晹
庤偼暔偺攃帩側偳偺僞僗僋偺懠偵丆埇庤傗巜嵎偟側偳恖娫偲偺僐儈儏僯働乕僔儑儞偱傕昿斏偵巊梡偝傟傑偡丏 KOBIAN偱偼ADL巟墖僒乕價僗偺偨傔偵庤偵怗偭偨偲偒偺姶怗偲埨慡惈傪廳帇偟偰偍傝丆峔憿晹嵽偑擃慺嵽偱偱偒偨僴儞僪 WSH-1RII乮Waseda Soft Hand-No.1 Refined II乯傪奐敪偟傑偟偨(Fig. 2.13)丏 傑偨丆WSH-1RII偼揔愗側椡偱埇庤傪峴偆偨傔丆僔乕僩忬偺椡僙儞僒flexiforce®傪寁14売強偵搵嵹偟偰偄傑偡丏(Fig. 2.14)(Fig. 2.15)
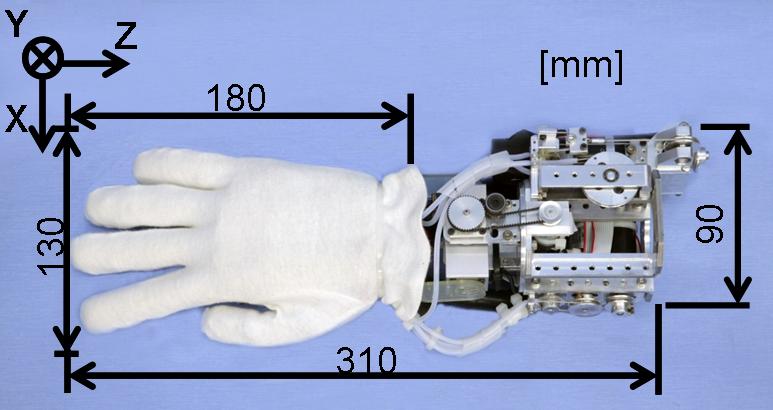
Fig. 2.13 庤晹乮WSH-1RII乯
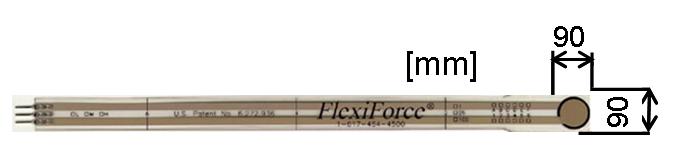
Fig. 2.14 僔乕僩忬椡僙儞僒 FlexiForce®
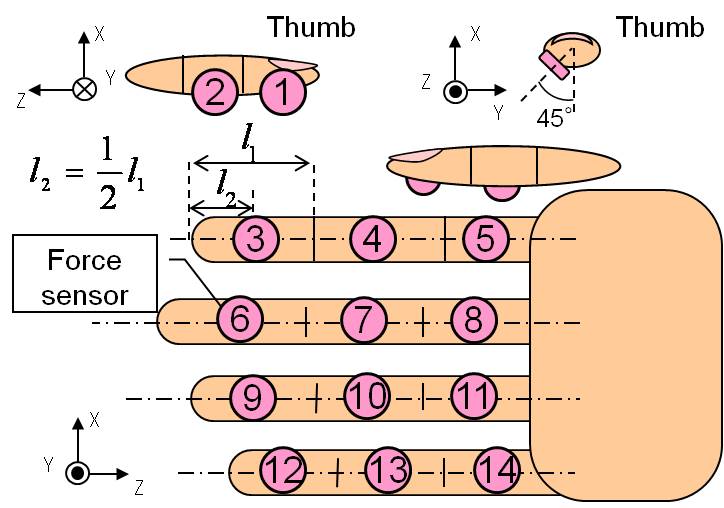
Fig. 2.15 僙儞僒庢傝晅偗埵抲
彾晹偼恖敡僎儖®偱惉宍偟丆撪晹偵崪傪柾偟偨嬥懏僷僀僾偑偁傝傑偡丏 巜晹偼僔儕僐乕儞僑儉偱惉宍偟丆忋偐傜恖敡僎儖®偺旂傪旐偣偰偁傝傑偡(Fig. 2.16)丏
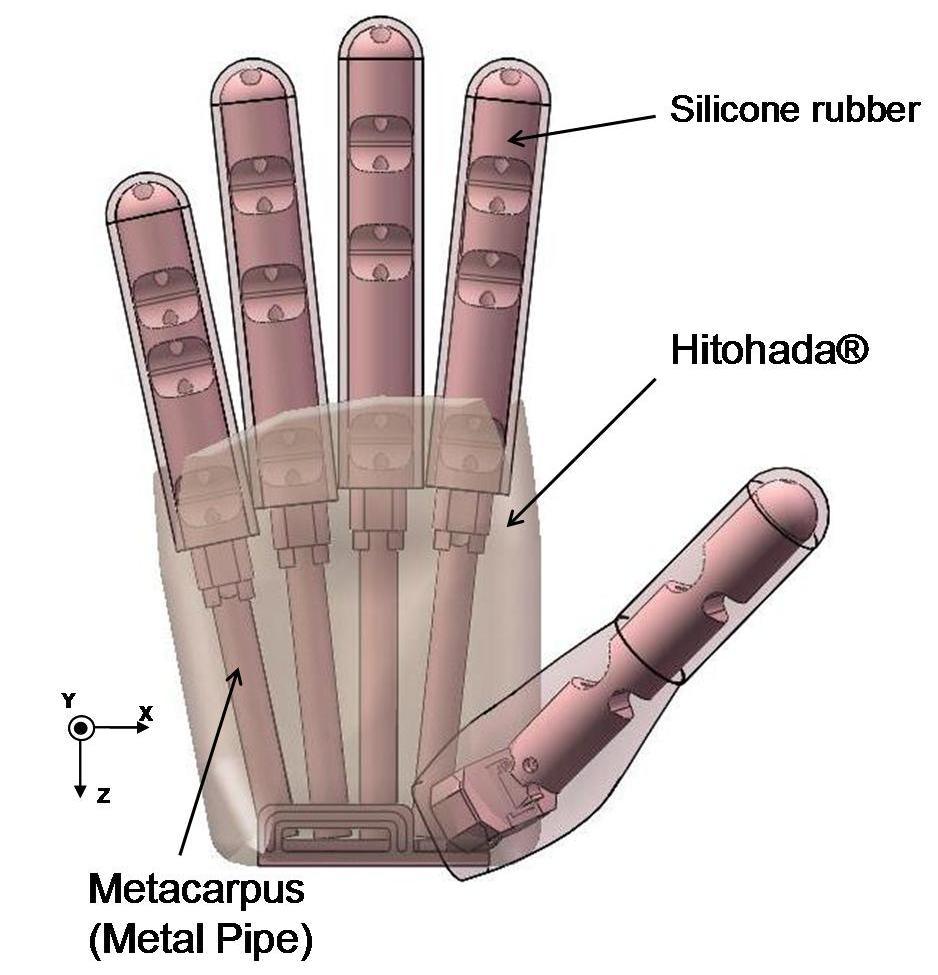
Fig. 2.16 彾撪晹峔憿
奺巜偺孅嬋偼Fig. 2.17偺傛偆偵儚僀儎嬱摦偵傛傞楎嬱摦傪嵦梡偟偰偍傝傑偡丏傑偨丆Fig. 2.18偺傛偆偵恖嵎偟巜丆拞巜偺孅嬋偍傛傃恊巜撪奜揮偑撈棫1帺桼搙偵側偭偰偍傝丆 恊巜丒栻巜丒彫巜偺孅嬋偼奺儚僀儎傪1杮偵傑偲傔偰楢摦偡傞1帺桼搙偵偡傞偙偲偱丆寁4帺桼搙偱摦嶌偟傑偡丏儚僀儎偑堷偭挘傜傟傞偲Fig. 2.19偺傛偆偵丆暔懱偺宍忬偵曧偭偰巜偑孅嬋偟傑偡丏 傑偨奺巜偺怢揥偼丆擃慺嵽偺抏惈椡傪棙梡偟偰傑偡丏
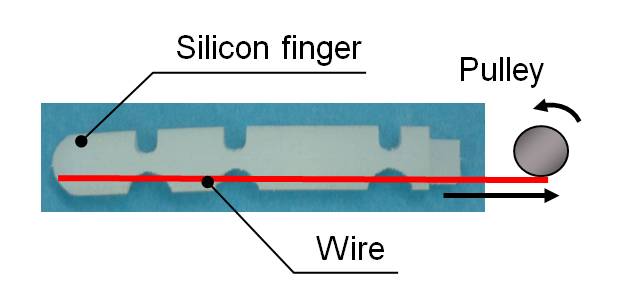
Fig. 2.17 巜晹婡峔
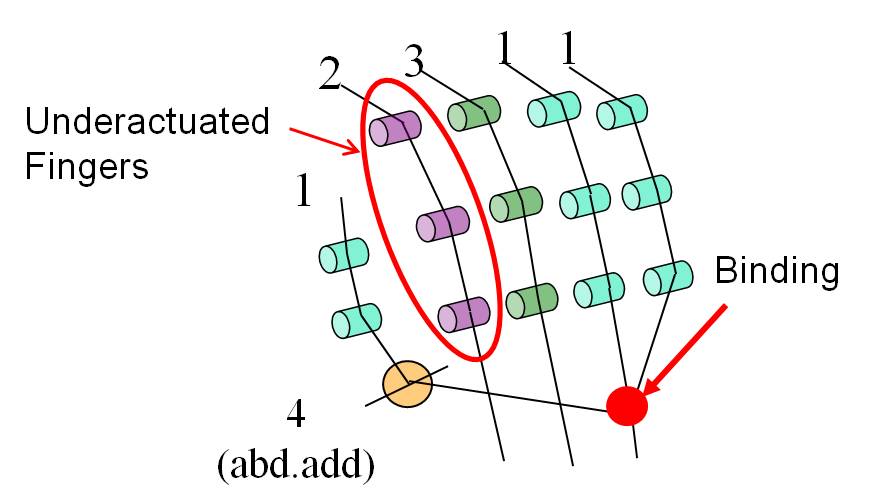
Fig. 2.18 僴儞僪帺桼搙峔惉
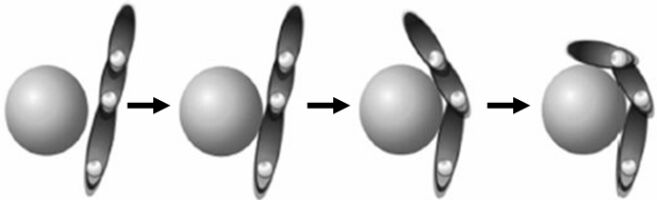
Fig. 2.19 曧偄攃帩
僸僩偼丆媴忬偺暔懱傪攃帩偡傞応崌偵丆恊巜傪奜揮曽岦偵奐偒彫巜偲岦偐偄崌偆傛偆側埵抲偱捦傓偺偵懳偟丆墌摏忬偺暔懱傪攃帩偡傞応崌偼丆恊巜傪撪揮曽岦偵夞揮偝偣拞巜偲岦偐偄崌偆埵抲偱攃帩偟偰偄傑偡丏 偙偺恊巜偺撪揮丒奜揮塣摦傪丆儚僀儎嬱摦偵傛傞1帺桼搙偱摦嶌偝偣傞偙偲偱丆暔懱偺埨掕偟偨攃帩偑壜擻偲側偭偰偄傑偡(Fig. 2.20, Fig. 2.21)丏
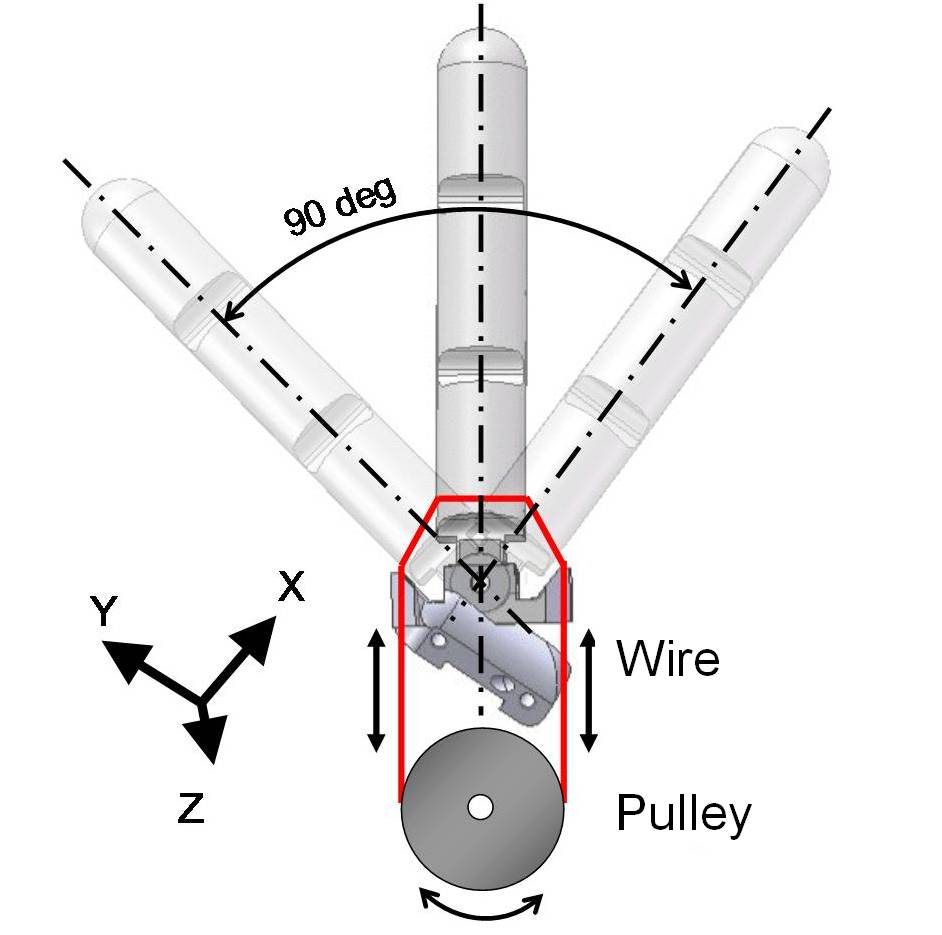
Fig. 2.20 恊巜撪奜揮婡峔 |
Fig. 2.21 恊巜撪奜揮 |
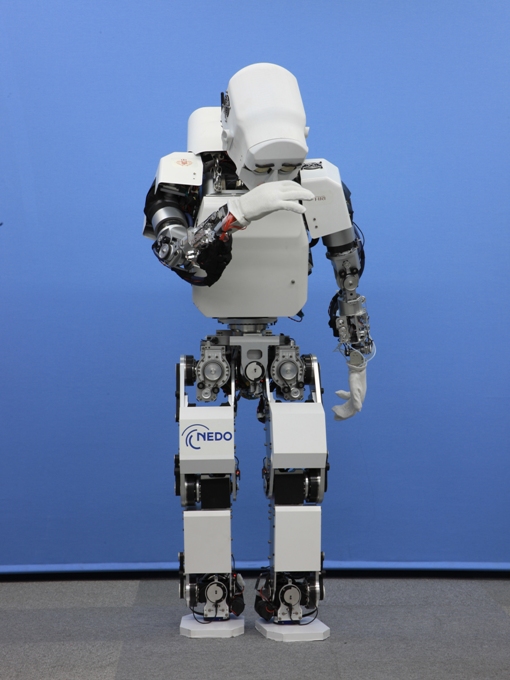
KOBIAN偱偼懱姴晹偵僺僢僠幉傪帩偭偰偄傑偡丏懱姴晹偺摦偒偵傛傝丆曕峴帪偵僶儔儞僗傪庢傞偙偲偑偱偒傑偡丏傑偨丆搟傝偱偼慜孹偡傞丆嬃偒偱偼屻孹偡傞側偳丆慡恎傪梡偄偨忣摦昞弌擻椡偵傕婑梌偟偰偄傑偡丏
傛傝恖娫傜偟偄曕峴塣摦傪壜擻偵偡傞婡峔偲偟偰丆崢晹偼儓乕幉偲儘乕儖幉偺2帺桼搙偑偁傝傑偡丏 偙偺帺桼搙偵傛傝丆忋懱偺巔惃偵埶懚偟側偄崢偺塣摦傪桳岠偵妶梡偡傞偙偲偱旼娭愡偺怢揥埵(旼偑怢傃偒偭偨忬懺)傪敽偆曕峴塣摦偑壜擻偱偡(Fig. 2.22)丏
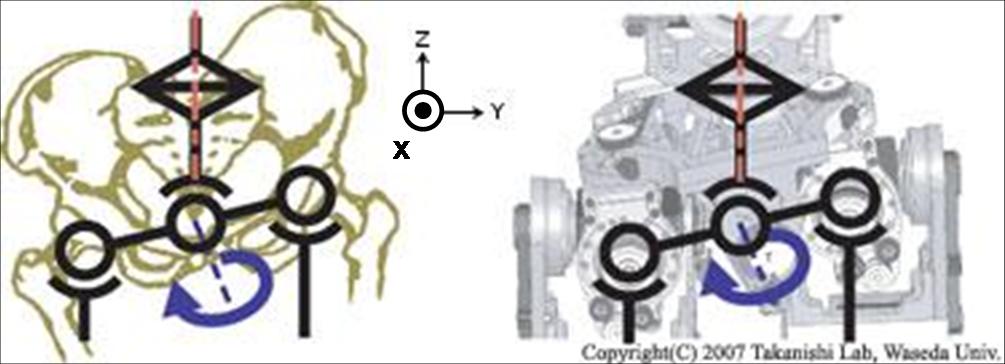
Fig. 2.22 2帺桼搙傪桳偡傞崢晹婡峔
帇妎僙儞僒偲偟偰丆椉娽偵姅幃夛幮ARTRAY偺僇儔乕CMOS僇儊儔(ARTCAM-022MINI) 傪搵嵹偟偰偄傑偡(Fig. 2.23)丏

Fig. 2.23 CMOS僇儊儔
懌晹偵壛傢傞壸廳傪寁應偡傞偨傔偵丆椉媟懌姴埵抲偵X,Y,Z幉曽岦偺壛廳偍傛傃偦傟偧傟偺幉偺廃傝偺儌乕儊儞僩傪寁應偱偒傞 僯僢僞姅幃夛幮偺6幉椡妎僙儞僒乮IFS-67M25A50-I40乯 傪搵嵹偟偰偄傑偡丏 寁應偟偨抣傪梡偄偰曕峴傗慡恎塣摦帪偺埨掕壔惂屼傪峴偭偰偄傑偡(Fig. 2.24)丏

Fig. 2.24 6幉椡妎僙儞僒
KOBIAN偺慡僔僗僥儉峔惉偼Fig. 2.25偺傛偆偵側偭偰偄傑偡丏 儘儃僢僩偼,攚拞偺PC(CPU: Pentium M 1.6GHz, RAM: 2GB, OS: QNX Neutrino 6.3.0) 偱惂屼偝傟偰偄傑偡丏
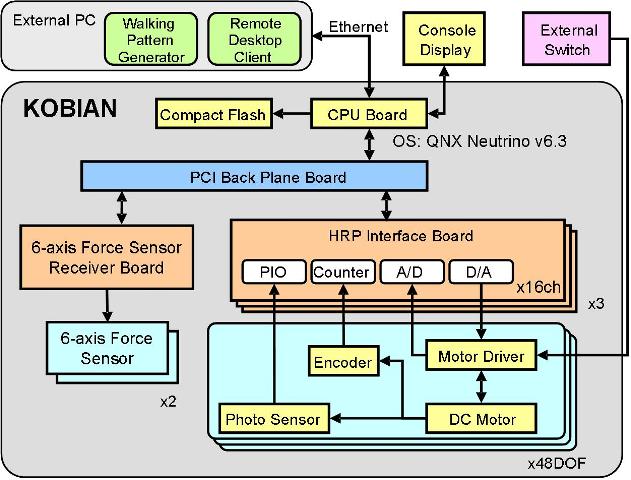
Fig. 2.25 惂屼僔僗僥儉峔惉
昞忣偺惂屼偵偼Ekman偺6婎杮昞忣傪嵦梡偟偰偍傝丆"婌傃"丆"搟傝"丆"嬃偒"丆"斶偟傒"丆"嫲傟"丆"寵埆"丆 6偮偺忣摦偵懳墳偡傞昞忣偵"捠忢忬懺"傪壛偊偨7偮偺婎杮昞忣僷僞乕儞傪偁傜偐偠傔掕媊偟偰偄傑偡丏 KOBAIN偱偼Fig. 3.1偱帵偟偨昞忣傪昞忣僷僞乕儞偲偟偰掕媊偟偰偄傑偡丏昞忣丒榬丒庤丒崢丒媟偵傛傞慡恎傪梡偄偨懡條側昞弌偑壜擻偱偡丏
|

|

|
|
| (a) 婌傃 | (b) 嫲傟 | (c) 嬃偒 | (d) 斶偟傒 |

|

|
|
|
| (e) 搟傝 | (f) 寵埆 | (g) 捠忢 | |
Fig. 3.1 KOBIAN偺忣摦昞弌
帇妎僙儞僒傛傝巜昗偺埵抲丒嫍棧傪擣幆偟丆娽媴丒庱晹丒崢晹丒懱姴晹偍傛傃媟晹傪梡偄偨巜昗捛廬偑壜擻偱偡丏(Fig.4)
Fig. 4 巜昗捛廬
夋憸傪僋儕僢僋偡傞偙偲偵傛傝幚尡塮憸傪尒傞偙偲偑偱偒傑偡丏
|
|
|||
|
|
|
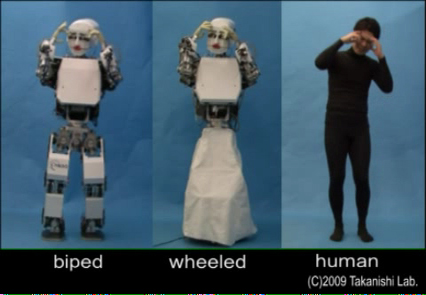
HABIAN偼丆忋敿恎偑KOBIAN偲摍偟偔丆壓敿恎偑幵椫宆偺僸儏乕儅僲僀僪儘儃僢僩偲偟偰奐敪偝傟傑偟偨丏 KOBIAN偲偺堏摦婡峔偺堘偄偲偦傟偵傛傞奜尒丒摦嶌偺堘偄偑恖娫偵梌偊傞報徾偺昡壙偲斾妑傪峴偄傑偟偨丏 HABIAN偺戜幵儌僕儏乕儖偵偼擔杮SGI幮偺BlackShip傪梡偄傑偟偨丏 HABIAN偺慡懱幨恀傪Fig. 5.1偵丆帺桼搙峔惉傪Fig. 5.2偵丆惂屼僔僗僥儉峔惉傪Fig. 5.3偵帵偟傑偡丏 慡37帺桼搙傪桳偟偰偍傝丆奜奅傪懆偊傞偨傔偺僇儊儔丆僶僢僥儕乕側偳偑搵嵹偝傟, 攚拞偺PC(CPU: Pentium M 1.6GHz, RAM: 2GB, OS: QNX Neutrino 6.3.0) 偱惂屼偝傟偰偄傑偡丏
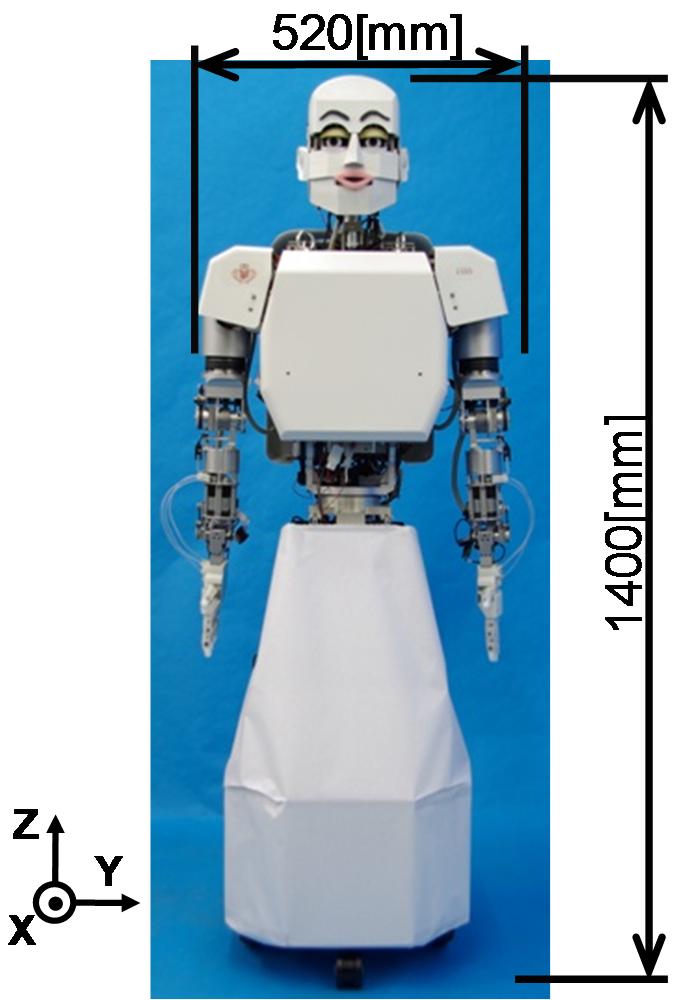
Fig. 6.1 HABIAN |
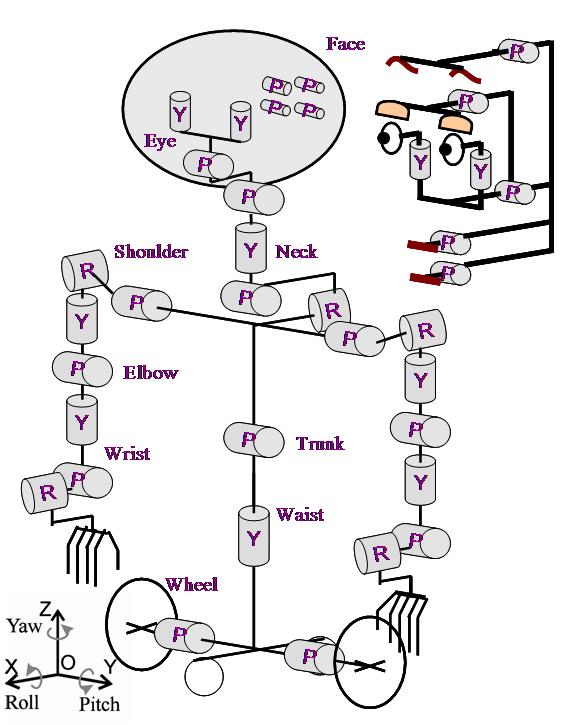
Fig. 6.2 帺桼搙攝抲恾 |
|
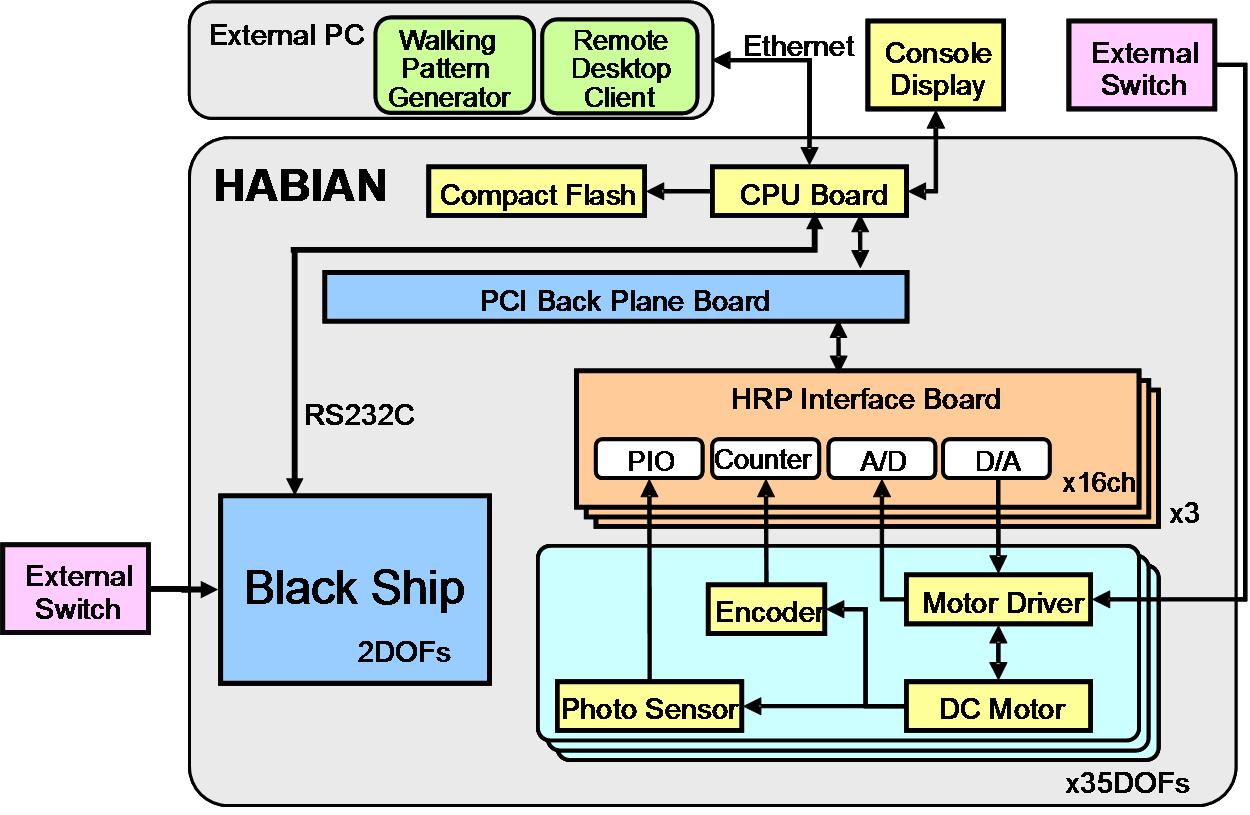
Fig. 6.3 惂屼僔僗僥儉峔惉
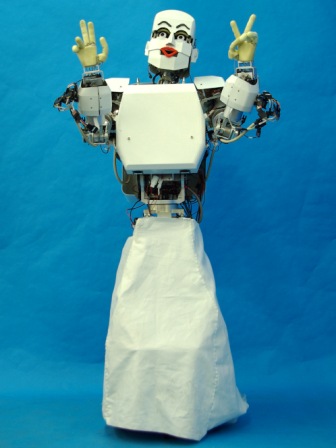
HABAIN傕KOBIAN偲摨條偵丆Fig. 6.5偺傛偆側忣摦昞弌偑壜擻偱偡丏
|

|

|

|
|

|
Fig. 6.4 HABIAN偺忣摦昞弌
夋憸傪僋儕僢僋偡傞偙偲偵傛傝幚尡塮憸傪尒傞偙偲偑偱偒傑偡丏
|
忣摦昞弌(斾妑) |
|
|

|
|
杮尋媶偼撈棫朄恖怴僄僱儖僊乕丒嶻嬈媄弍憤崌尋媶婡峔偺乽愴棯揑愭抂儘儃僢僩梫慺媄弍奐敪僾儘僕僃僋僩乿乮II丏僒乕價僗儘儃僢僩暘栰尋媶奐敪崁栚亙2亜乽崅楊幰懳墳僐儈儏僯働乕僔儑儞俼俿僔僗僥儉乿乯偵偰峴傢傟傑偟偨丏 傑偨丆杮尋媶偼憗堫揷戝妛僸儏乕儅僲僀僪尋媶強偺嫤椡偑偁傝傑偟偨丏杮尋媶強偺僸儏乕儅僲僀僪僐儞僜乕僔傾儉傊偺嶲壛婇嬈偵懳偟偰姶幱偺堄傪昞偟傑偡丏 傑偨杮尋媶偼僸儏乕儅僲僀僪崙嵺尋媶強ROBOCASA偺嫤椡偑偁傝傑偟偨丏僀僞儕傾奜柋徣暥壔岎棳怳嫽嬊偺尋媶丒怳嫽嶻嬈墳梡帠嬈偵姶幱偟傑偡丏 傑偨,杮尋媶偺堦晹偼暥晹壢妛徣僌儘乕僶儖COE僾儘僌儔儉乽僌儘乕僶儖儘儃僢僩傾僇僨儈傾乿偺巟墖傪庴偗傑偟偨丏 嵟屻偵丆尋媶偵偛嫤椡捀偒傑偟偨姅幃夛幮丂僜儕僢僪儚乕僋僗丒僕儍僷儞丆 姅幃夛幮丂僋儔儗丆憗堫揷戝妛棟岺妛憤崌尋媶強偵姶幱偺堄傪昞偟傑偡丏
Last Update: 2010-07-27