| Japanese / English | ||
| Japanese / English | ||
 |
|
|||||
| 1. Introduction | ||
| 2. Mechanism | ||
| 3. Musical Performance System | ||
| 4. Musical Performance Movie | ||
| 5. Acknowledgment |
||
| Musical Performance Activities | ||
| Papers |
| Since 1990, the research of the anthropomorphic
flutist robot at Waseda University has focused
on reproducing human organs (lips, lungs,
neck, arms, fingers, tonguing, and vibrato)
which are required for flute playing. The
main goal of this research is to clarify
the flute playing mechanism from engineering
viewpoint and to enable the communication
with humans at emotional level. |
 |
 |
 |
 |
 |
||
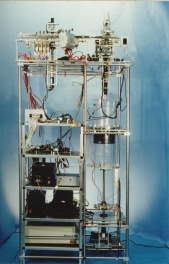
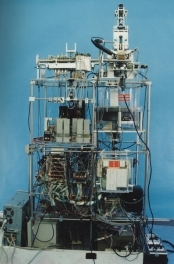
| (1990) |
(1992) |
(1998) |
(2002) |
(2003) |
||
| (more details) | (more details) |
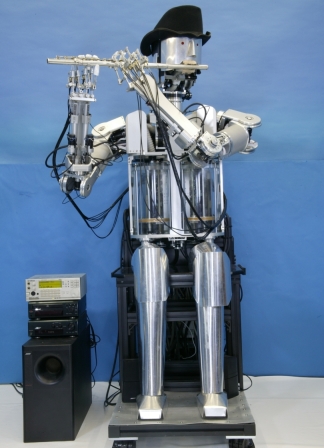
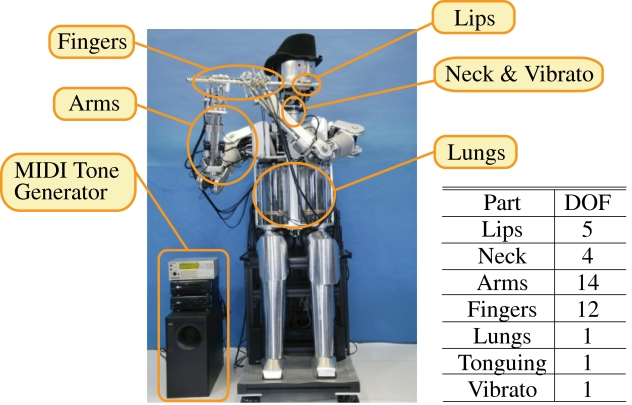
| In 2004, we developed the anthropomorphic
flutist robot WF-4R(Waseda Flutist No.4 Refined)
with 38-DOFs. *Click each part of WF-4R to jump to the details. |
||
 |
|
|
||||||||||||
| |
|
||||||||||||
|
|
||||||||||||
| |
|
||||||||||||
 |
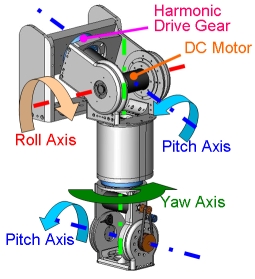 |
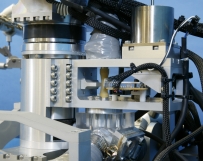
The arm system has 7-DOFs: the upper arm
has 4-DOFs and the forearm has 3-DOFs. The upper arm system was designed to increase the motion range of the flute positioning. A harmonic drive gear has been used to achieve a high accuracy positioning. |
||||
 |
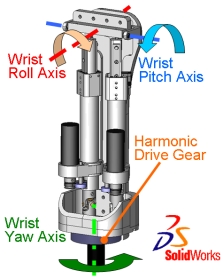 |
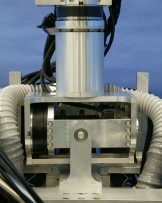
The parallel mechanism has the advantage
of having high positioning accuracy
and high
mechanical stiffness. We have adopted
a 2-DOF
parallel mechanism for the forearm. The wrist pitch axis is obtained by moving two links on the same direction, and the wrist roll axis is done by moving two links on the opposite direction. |
| |
||
|
|
|||||||||||
| |
|
|||||||||||
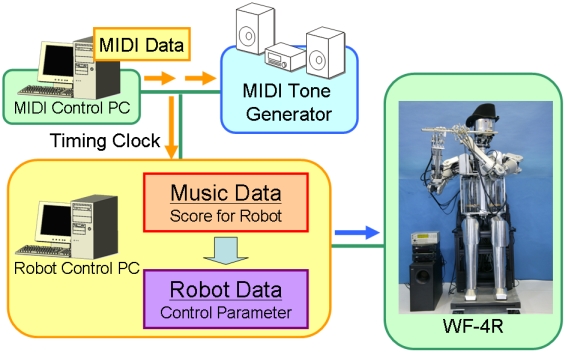
| The MIDI accompaniment system of WF-4R
consists of two computers to control the
robot’s musical performance: one for controlling
the robot and the other one to generate the
accompaniment MIDI data. Both computers are
connected by the MIDI system, and the synchronization
of the performance is achieved by using the
timing clock from the MIDI signal. |
||
 |
|
||||||||||
| A part of this research was conducted at the Humanoid Robotics Institute (HRI), Waseda University, and part of this was supported by a Grant-in-Aid for the WABOT-HOUSE Project by Gifu Prefecture. | |||||||
|
|||||||
|
|
| Copyright (c) 2004-2005 Team FLUTE / Takanishi Laboratory | ||
| All rights reserved. |