| Japanese / English | ||
| Japanese / English | ||
 |
|
|||||
| 1. 尋媶栚揑 | ||
| 2. WF-4R偺奺晹婡峔 | ||
| 3. 墘憈僔僗僥儉 | ||
| 4. 墘憈儉乕價乕 | ||
| 5. 幱帿 |
||
| 岞墘妶摦偺儁乕僕 | ||
| 娭楢榑暥偺儁乕僕 |
| 丂崅惣尋媶幒偱偼丆恖偺怱恎偺儊僇僯僘儉傪捛媦偟丆恖娫偲儘儃僢僩偺嫟惗傪栚巜偟偰僸儏乕儅僲僀僪儘儃僢僩偺尋媶奐敪傪峴偭偰偄傑偡丏偦偺拞偱恖娫偲忣弿偁傞偄偼姶惈儗儀儖偱偺岎棳偑偱偒傞偙偲偼丆僸儏乕儅僲僀僪儘儃僢僩偵偍偗傞廳梫側婡擻偺傂偲偮偱偁傞偲峫偊偰偄傑偡丏偦偙偱巹偨偪偼偦偺傛偆側応偲偟偰偺壒妝嬻娫偵拝栚偟丆恖娫宍僼儖乕僩墘憈儘儃僢僩偺奐敪傪峴偭偰偄傑偡丏 丂杮儘儃僢僩偼丆僼儖乕僩墘憈帪偵偍偗傞恖懱奺婍姱偺摥偒傪婡夿儌僨儖偱嵞尰偡傞偙偲偱丆恖娫偺僼儖乕僩墘憈偺儊僇僯僘儉丆昞尰椡偺崅偄墘憈庤朄丆偍傛傃恖娫偲儘儃僢僩偲偺壒妝嬻娫偵偍偗傞僀儞僞儔僋僔儑儞傪岺妛揑帇揰偵棫偭偰捛媮偟丆壒妝傪捠偠偰恖乆偵姶摦傪梌偊傞偙偲傪栚揑偲偟偰偄傑偡丏 丂恖娫宍僼儖乕僩墘憈儘儃僢僩偺尋媶偼1990擭偵奐巒偝傟丆僼儖乕僩墘憈偵偍偗傞偝傑偞傑側婍姱偺摥偒傪柾媅偟偨婡夿僴乕僪僂僃傾偺奐敪偲丆MIDI敽憈摨婜僔僗僥儉偺峔抸傪峴偄丆偙傟傑偱偵WF僔儕乕僘偲偟偰4懱偺恖娫宍僼儖乕僩墘憈儘儃僢僩傪奐敪偟偰偒傑偟偨丏傑偨丆僾儘僼儖乕僩憈幰偺庒徏媣恗岝巵傪僥僋僯僇儖傾僪僶僀僓乕偵寎偊丆墘憈偺昞尰椡岦忋偲儘儃僢僩偺帺棩惈偺岦忋傪栚巜偟偨丆僼儖乕僩悂柭壒偺帺棩扵嶕偺尋媶傗丆恖娫傪柾曧偟偨墘憈偵娭偡傞尋媶丆傑偨恖娫偲儘儃僢僩偺僀儞僞儔僋僔儑儞偵娭偡傞尋媶傪峴偭偰偄傑偡丏 |
 |
 |
 |
 |
 |
||
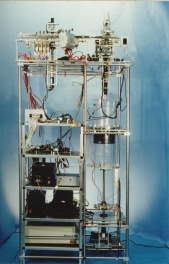
| (1990) |
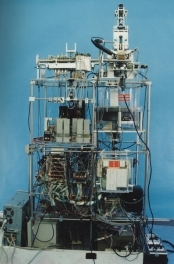
(1992) |
(1998) |
(2002) |
(2003) |
||
| (WF-3RIX偺徻嵶) | (WF-4偺徻嵶) |
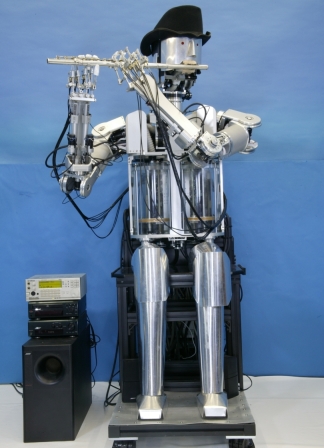
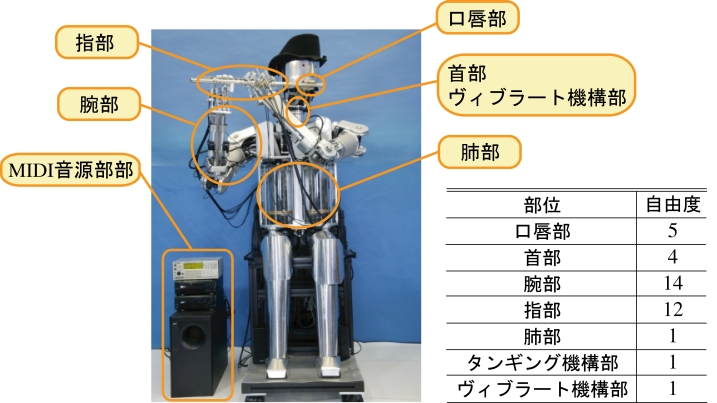
| 丂2004擭偵奐敪偟偨恖娫宍僼儖乕僩墘憈儘儃僢僩WF-4R(Waseda
Flutist No.4 Refined)偼丆僼儖乕僩墘憈偵昁梫側恖懱奺婍姱偺婡擻傪嵞尰偟偨奺晹婡峔傪旛偊偰偍傝丆慡38帺桼搙偱峔惉偝傟偰偄傑偡丏 |
||
| (恾拞偺晹埵柤傪僋儕僢僋偡傞偲奺晹婡峔偺愢柧偵堏摦偟傑偡) |
||
 |
|
|
||||||||||||
| 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 |
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 |
||||||||||||
|
|
||||||||||||
| 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 |
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 |
||||||||||||
 |
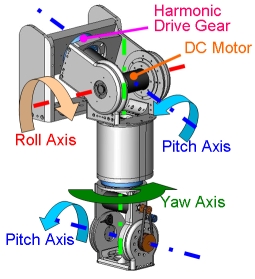 |
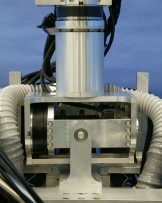
丂榬晹偼忋榬4帺桼搙丆慜榬3帺桼搙偺寁7帺桼搙偱峔惉偝傟偰偍傝丆岥怬晹偵懳偟偰僼儖乕僩偺壧岥偺埵抲傪崅惛搙偵惂屼偡傞偙偲偑壜擻偱偡丏 丂忋榬晹偼尐晹偵僺僢僠幉丆儘乕儖幉丆儓乕幉丆旾晹偵僺僢僠幉偺寁4 帺桼搙偺嬱摦晹傪丆DC 儌乕僞偲僴乕儌僯僢僋僪儔僀僽僊傾偱峔惉偟丆崅惛搙側埵抲寛傔傪壜擻偲偟傑偟偨丏 丂 |
||||
 |
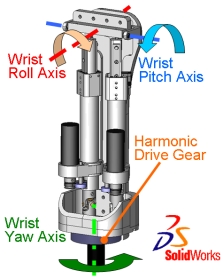 |
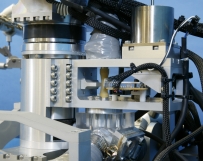
丂慜榬晹偼丆庤庱偺儓乕幉偼慜弎偟偨忋榬晹偲摨條偵丆DC 儌乕僞偲僴乕儌僯僢僋僪儔僀僽僊傾偵傛偭偰嬱摦偟傑偡丏僺僢僠幉丒儘乕儖幉偺婡峔偼丆2 杮偺捈摦偡傞傾僋僠儏僄乕僞傪梡偄偨僷儔儗儖儊僇僯僘儉偲側偭偰偄傑偡丏巜偺搵嵹偝傟傞晹暘偼僄儞僪僾儗乕僩偲傾僂僞乕僕儞僶儖偐傜峔惉偝傟傞僕儞僶儖婡峔偲側偭偰偍傝丆嵍塃偺儕儞僋偑忋壓摨偠摦偒傪偡傞偙偲偱庤庱偺僺僢僠幉傪丆忋壓媡偺摦偒傪偡傞偙偲偱庤庱偺儘乕儖幉傪嬱摦偝偣傑偡丏 |
| 丂 丂丂丂丂丂丂丂丂 丂丂 丂丂丂丂丂丂丂丂丂丂丂
丂丂
丂 |
||
|
|
|||||||||||
| 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 |
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 |
|||||||||||
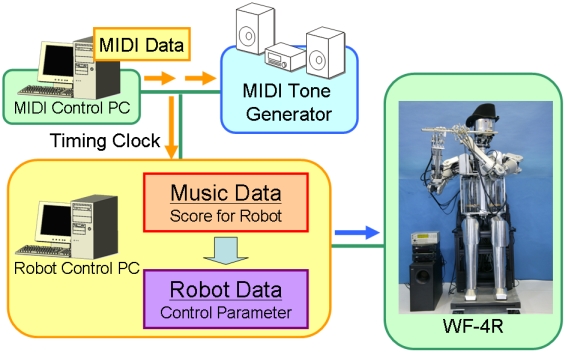
| 丂恖娫宍僼儖乕僩墘憈儘儃僢僩WF-4R偼丆敽憈梡MIDI僨乕僞偺弌椡傪峴偆MIDI僐儞僩儘乕儖僷僜僐儞偲儘儃僢僩惂屼梡僷僜僐儞偵傛傝墘憈傪峴偭偰偍傝傑偡丏MIDI僐儞僩儘乕儖僷僜僐儞偼MIDI壒尮傊偺敽憈僨乕僞傪弌椡偟丆MIDI怣崋偺僞僀儈儞僌僋儘僢僋偵摨婜偟偰儘儃僢僩惂屼僷僜僐儞偑儘儃僢僩偺惂屼傪峴偄傑偡丏儘儃僢僩惂屼僷僜僐儞偼儘儃僢僩僨乕僞偲儈儏乕僕僢僋僨乕僞偲屇傫偱偄傞俀庬椶偺僨乕僞傪棙梡偟偰墘憈傪峴偄傑偡丏儈儏乕僕僢僋僨乕僞偲偼儘儃僢僩梡偺妝晥偵偁偨傝丆儘儃僢僩僨乕僞偼奺壒柤偵懳偡傞儘儃僢僩偺惂屼僷儔儊乕僞偑婰榐偝傟偰偄傑偡丏 |
||
 |
|
||||||||||
| 丂杮尋媶偼憗堫揷戝妛僸儏乕儅僲僀僪尋媶強偺傕偲偱丆婒晫導偐傜偺埾戸偱偁傞WABOT-HOUSE僾儘僕僃僋僩偵傛傝峴傢傟傑偟偨丏偙偙偵姶幱偺堄傪昞偟傑偡丏 |
|||||||
|
|||||||
|
|
| Copyright (c) 2004-2005 Team FLUTE / Takanishi Laboratory | ||
| All rights reserved. |