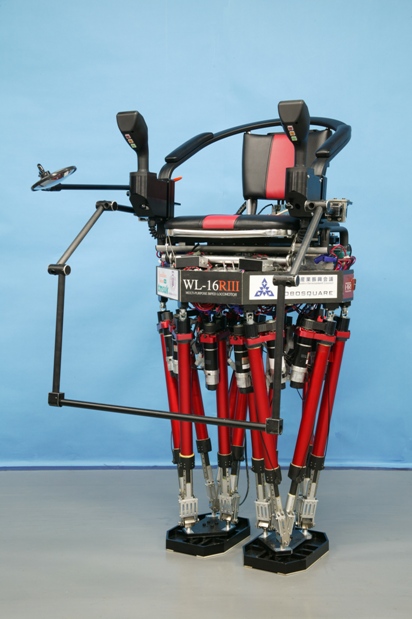
WL-16RIII概要
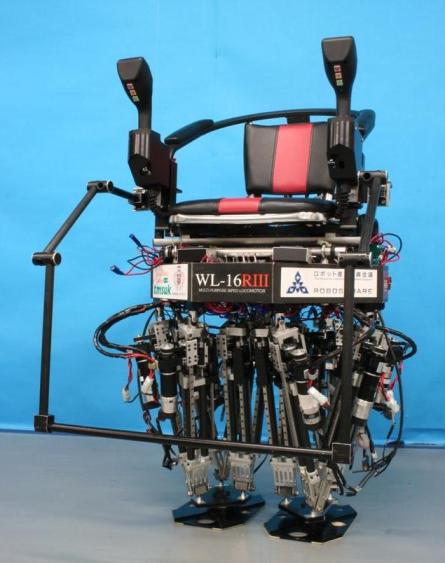
WL-16RIIIは,脚機構にスチュワートプラットホーム型パラレルメカニズムを採用しており,パラレルメカニズムの高出力を生かし,人や物を乗せて歩行を行うことができます.基本構造および歩行制御方式はWL-16と同様ですので,こちらをご覧ください.
WL-16RIIIの仕様は以下のようになっております.
TOPへ戻る
2段直動アクチュエータの開発
1.研究目的
WL-15,WL-16およびその改良機では,スチュワートプラットフォームと呼ばれるパラレルリンクを採用しておりますが,この機構には可動範囲が狭いという短所があり,これまでは歩行の仕方を工夫することにより200 mm以上の段差を歩行することができておりました.しかしながら,歩行の仕方の工夫には限界があるため,新たに,よりストロークのあるアクチュエータを開発することを目的としました.
2.2段直動アクチュエータ
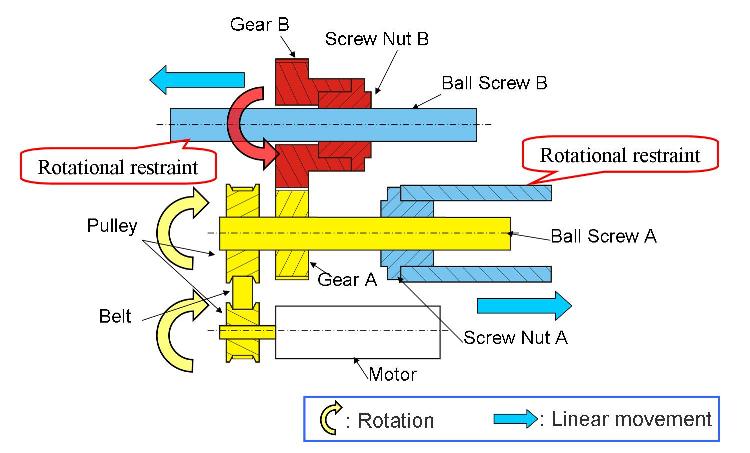
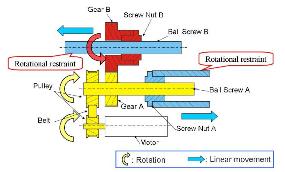
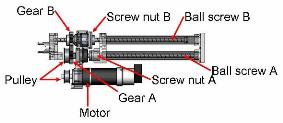
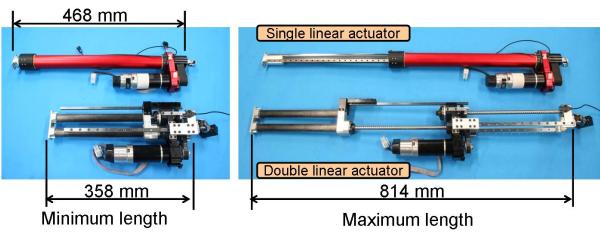
新たに開発した直動アクチュエータは,2段階に伸び縮みする構造をしており,以前に開発した単段のアクチュエータより大きな伸縮比を実現しております.また,2つのボールねじを同時に動かすため,危険速度が増加し,より速く伸び縮みさせることができるようになりました.
 |
 |
 |
|
Fig.2
2段直動アクチュエータ
|
 |
|
Fig.3
単段,2段直動アクチュエータの最短長,最長比較
|
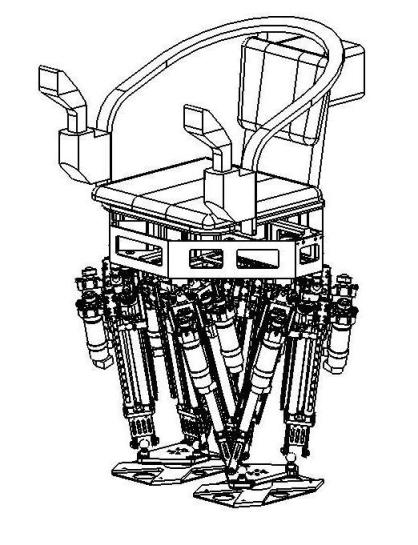
この2段直動アクチュエータをWL-16RIIIに取り付けた全体像はこちらになります.

|

|
|
(a)
最短時
|
(b)
最長時
|
|
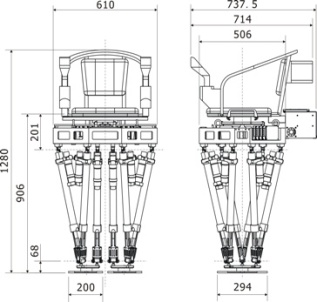
Fig.4
概観図(2段直動アクチュエータ取付時)
|
3.評価実験
以下のような実験を行うことで,2段直動アクチュエータの有効性を確認しました.
|
|
|
蹴上げ高さ220 mmの段差歩行(LPMC使用)
これまでのアクチュエータでは不可能であった着地軌道修正制御法を用いた状態での,高さ220 mmの段差歩行に成功
|
|
|
|
|
歩行周期0.96 s,歩幅300 mm/stepの歩行
危険速度が増加したため,いままでのアクチュエータでは不可能であった歩行周期0.96 s,歩幅300 mmの歩行に成功
|
|
TOPへ戻る
搭乗者の力学モデルを用いた歩行パターン生成
1.研究目的
これまで搭乗者は1つの質点と仮定してロボットの歩行パターンを生成しておりましたが,搭乗者は完全な質点ではないため,それが歩行の安定性に影響を与えておりました.本研究では,搭乗者の動きを考慮した歩行パターン生成法を用いることにより,より安定して歩行することを目的としました.
2.搭乗者の力学モデル
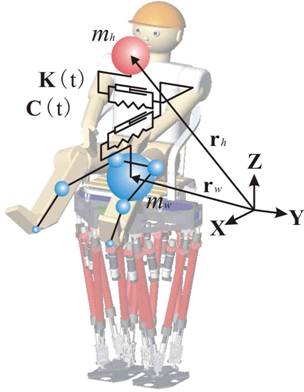
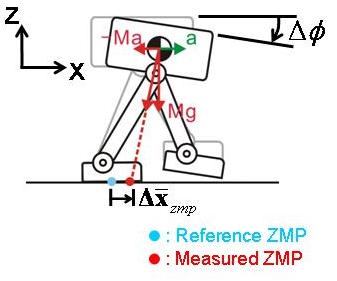
これまでの手法では,搭乗者を1質点とみなして歩行パターンを生成しておりましたが,本研究ではこれをFig.1に示すような,ロボットの腰部に固定される下半身モデルと,2自由度のばねダンパ質量系である上半身モデルとしました.そして,搭乗者を乗せてロボットを揺らし,そのときの腰にかかる力を測定することで,その搭乗者の弾性係数Kと粘性係数Cを計算し,搭乗者の外乱を考慮した歩行パターンを生成しております.
|
|
|
Fig.1
搭乗者の力学モデル
|
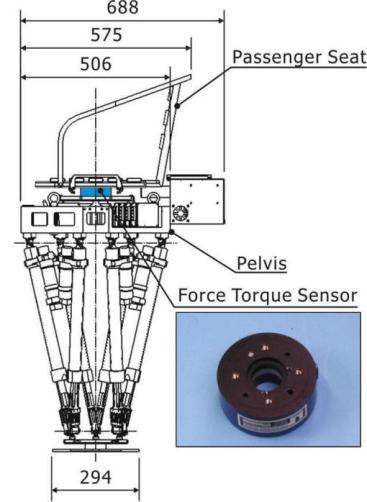
Fig.2
6軸力覚センサ
|
3.評価実験
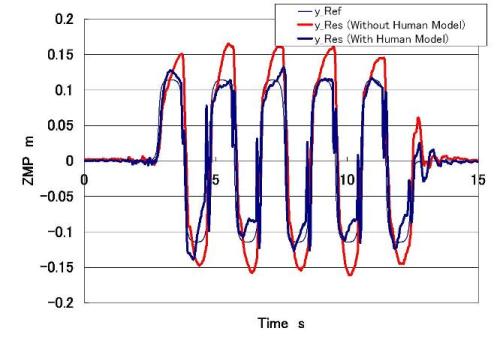
評価実験として,WL-16RIIIに成人男性を搭乗させ,提案した手法による搭乗者の受動的力学モデルを反映した場合と反映しない場合について歩行実験を行いました.搭乗者の体重は53 kg,身長は1.68 m,また歩幅は250 mm/step,歩行周期は0.96 s/stepとしました.そのときのy方向のZMP軌道は以下のようになり,モデルを反映したときのほうが,反映しない場合よりもより設定したZMPに近く,安定して歩行できていることが確認できました.なお,同様の実験を複数の人を乗せて行っておりますが,いずれの場合も,モデルを反映した場合の方がより安定して歩行できており,本手法の有効性を確認することができました.
|
|
Fig.3
ZMP軌道(y方向)
|
|
|
|
搭乗者の力学モデルを用いた歩行
搭乗者:53 kg
歩行周期:0.96 s,歩幅:250 mm/step
コンプライアンス制御なし
|
|
|
|
|
搭乗者の力学モデルを用いた歩行
歩行周期:0.96 s,歩幅:250 mm/step
コンプライアンス制御なし
|
|
TOPへ戻る
着地軌道修正制御とセミアクティブ支持多角形確保機構による実環境不整地歩行技術の開発
1.研究目的
2足歩行ロボットとして様々な環境において安定して歩行する歩行性能の実現が必要です.これまでに未知の不整路面歩行の安定化に関する研究を行ってきております.
本実環境不整地歩行技術における歩行安定化制御はZMP 計測用の力センサのみで実装可能であり,未知の凸路面,凹路面や傾斜路面における歩行を可能とするものです.本手法は以下の3 つのポイントからなります.

|
非線形コンプライアンス制御
|
|
|
推定姿勢補償制御
|
|
|
セミアクティブ支持多角形確保機構
|
|
|
非線形コンプライアンス制御
|
WL-16RIIにおいて,ロボット足部に設けられた力センサのみで実装可能な着地軌道修正制御を考案してきており,この手法は主に非線形コンプライアンス制御からなり,遊脚後期に足部の軌道修正を行います.そして,roll,pitch 軸回りに関しては,遊脚前期に基準歩行パターンに復帰するよう制御しています.基準歩行パターンは腰部と足部が常に平行であるように設定されているため,機械剛性やモータの応答偏差などにより腰部と路面との平行が確保されない場合,足部が路面に水平に着地することができず,姿勢角の誤差が累積されるという欠点がありました.
この問題を解決するためには,ロボット腰部にある姿勢角センサのデータをフィードバックする方法が容易に考えられますが,それでは着地軌道修正制御の力センサのみで実装可能という長所が薄れてしまうため,力センサから得られる情報のみで姿勢角を推定し補償する方法を考案しました.
|
|
Fig.1
着地軌道修正制御による腰姿勢角誤差の累積
|
|
|
推定姿勢補償制御
|
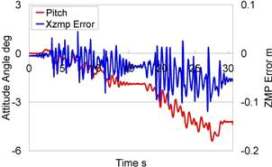
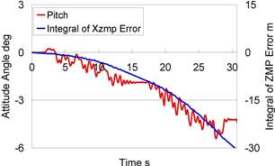
下図に着地軌道修正制御のみを用いて平坦路面を前進歩行したときの姿勢角とZMP 偏差を示します.この図より,姿勢角とZMP 偏差の間には相関関係があることがわかり,ZMP 偏差を0 に近づけると姿勢角の偏差もある程度抑えられると考えられます.しかし,ZMP 偏差を即時に0 にすると不安定になるため,ZMP 偏差をある設定した期間積分し,その値に応じて姿勢角を修正することとしました.
|
|
|
Fig.2 ZMP
偏差と腰姿勢角の関係
|
Fig.3 ZMP
偏差の積分値と腰姿勢角の関係
|

|
|
Fig.4
推定姿勢補償制御タイムチャート
|
|
|
セミアクティブ支持多角形確保機構
|
実環境の不整地には細かい凹凸が多数存在し,2足歩行ロボットの足底が剛体平板である場合,着地の仕方によっては支持多角形が一意に定まらず,また定まったとしても大きな支持多角形を構成することが難しいことが挙げられます.そのような路面では歩行安定化制御を用いても安定した歩行を継続することが困難です.この問題を解決するためにセミアクティブ支持多角形確保機構WS-1Rを開発してきています.
この足部機構と歩行安定化制御を併用することにより,剛体平板の足底では支持多角形の確保が難しい路面においても,安定した歩行が実現されることが期待されます.
2.実験映像
評価実験として,実験室内の擬似不整地歩行実験,またロボット特区内の実環境不整地歩行実験を行いました.
|
|
不整地歩行実験(福岡城跡)
歩行周期:2.04 [sec/step]
歩幅:200 [mm]
|
|
|
不整地路面歩行実験(屋内人間搭乗)
歩行周期:2.04 [sec/step]
歩幅:200 [mm]
|
|
|
不整地路面歩行実験(屋外人間搭乗)
歩行周期:2.04 [sec/step]
歩幅:200 [mm]
|
TOPへ戻る
デモンストレーション
|
|
不整地路面歩行実験その1(屋外人間搭乗)
歩行周期:1.02 [sec/step]
歩幅:200 [mm]
|
|
|
不整地路面歩行実験その2(屋外人間搭乗)
歩行周期:1.02 [sec/step]
歩幅:200 [mm]
|
TOPへ戻る