Takanishi Lab.
Monitoring Robot Group
-WAMOT-
WAMOT
● Operation
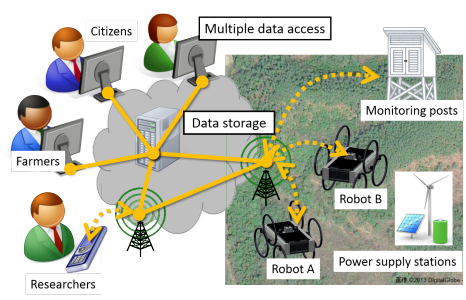 |
Fig.1 shows the image of operating system. We are going to use multiple robots outdoors, each robot monitor environment autonomously with cooperating each other. Each robot upload the monitoring data to a server, and users can watch the data to access it. In addition to this, users can also get real time data from robots and remote control robots by accessing to robot in emergency. We want to make environmental monitoring map and ecosystem map from the data we get. |
● System overview
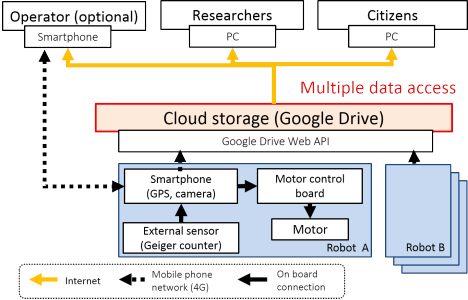 |
We made the system (see Fig.2) to realize the image of operation system. We use mobile phone line as communication tool that robot send to users and server and users remote control robots. We use public cloud system (Google drive) as server to storage monitoring data. We want to try to reduce the introducing cost of the system by using present infrastructure. |
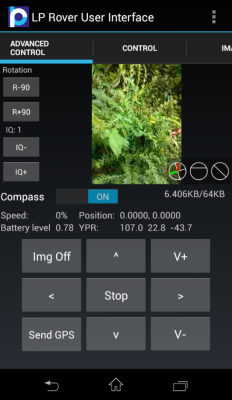 |
We can operate the robot using a smartphone
application
|
● Mechanism
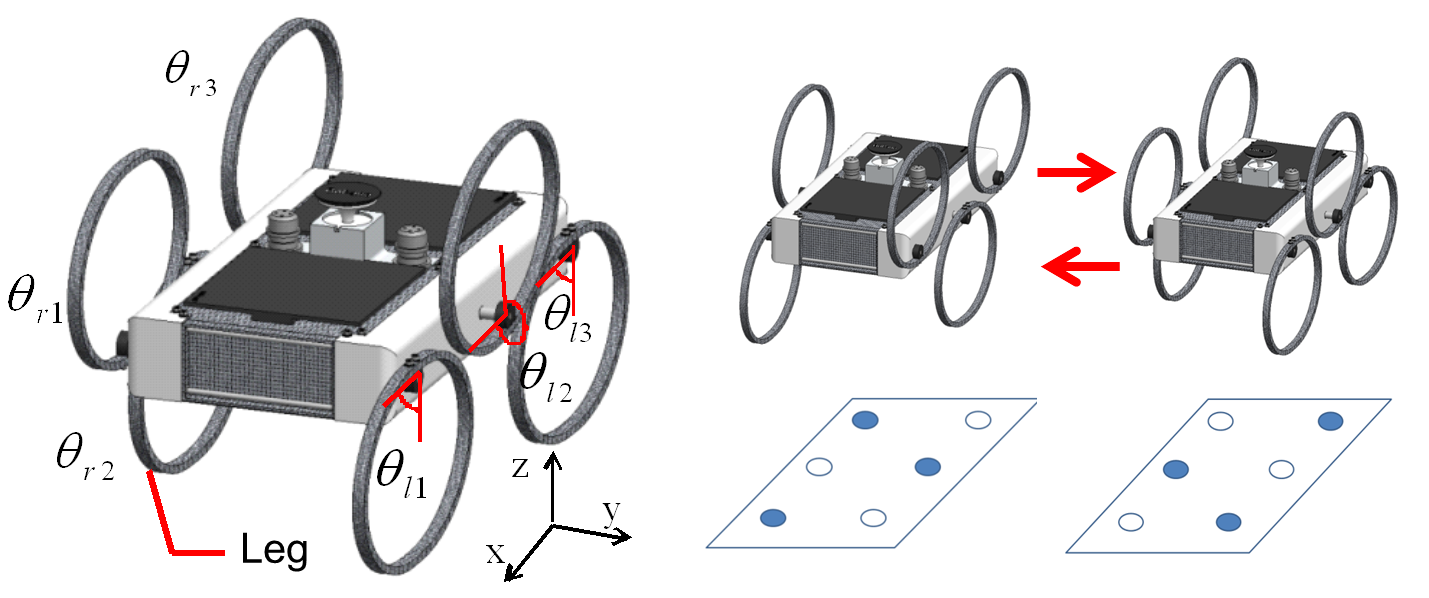 |
Fig.3 shows the running motion of robot. Robot have six elliptic legs (left has 3 legs and right has 3 legs), each legs are rotating around the axis, each legs kicks ground and robot can move. |
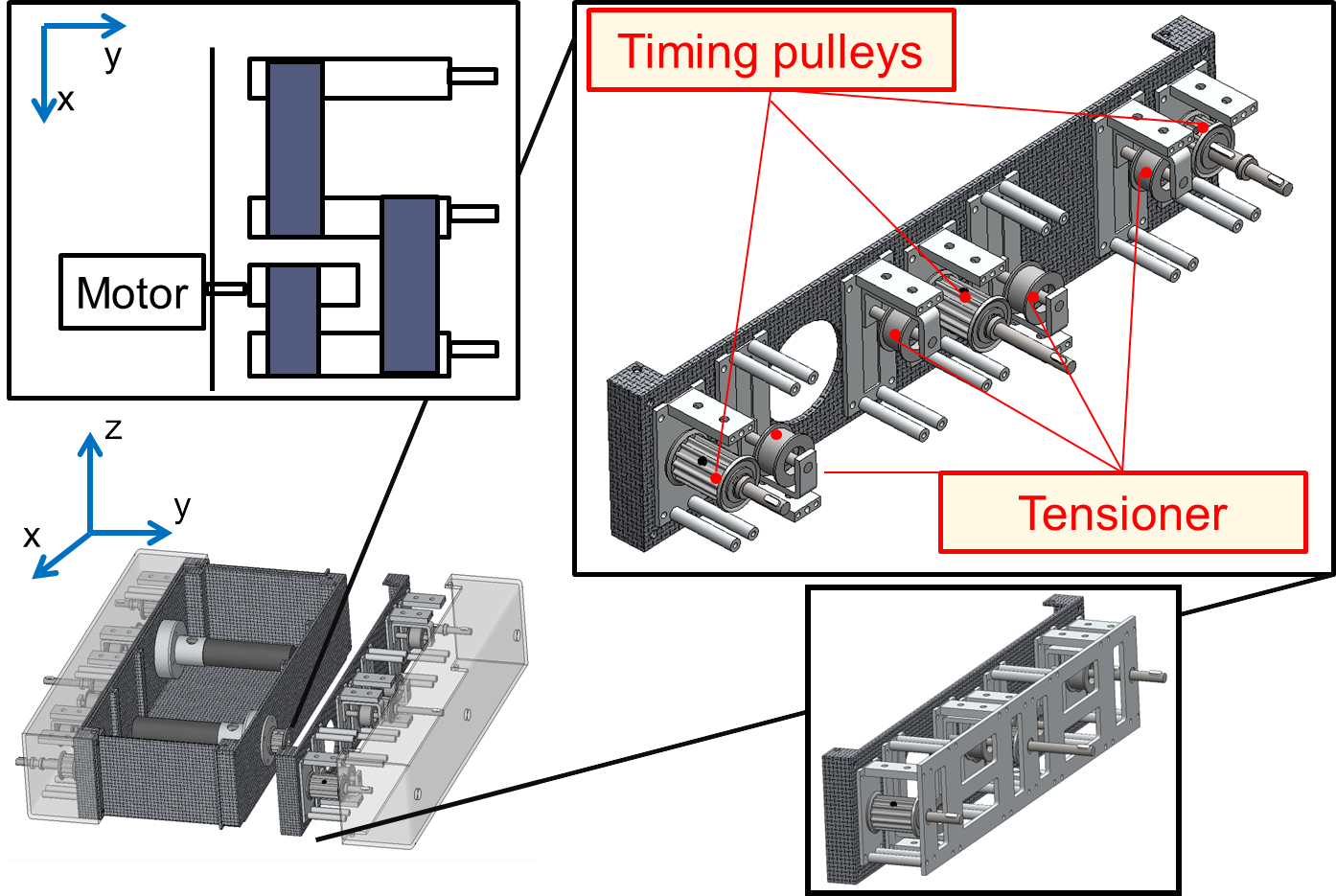 |
Fig.4 shows the connection of legs. We use timing belts to connect 3 legs. This mechanism can reduce motor and it can reduce cost. |
● New shape
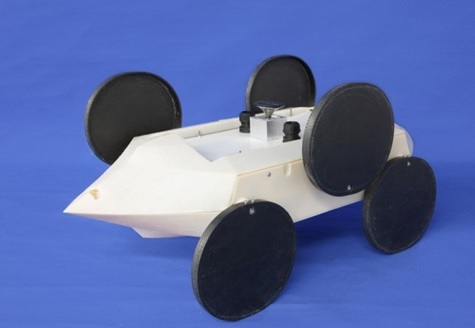 |
The robot is able to be attach the shape that has been developed with reference to the icebreaker. The new robot's shape improves running performance in an environment where there are obstacles like bamboo and reed. |
● Energy supply
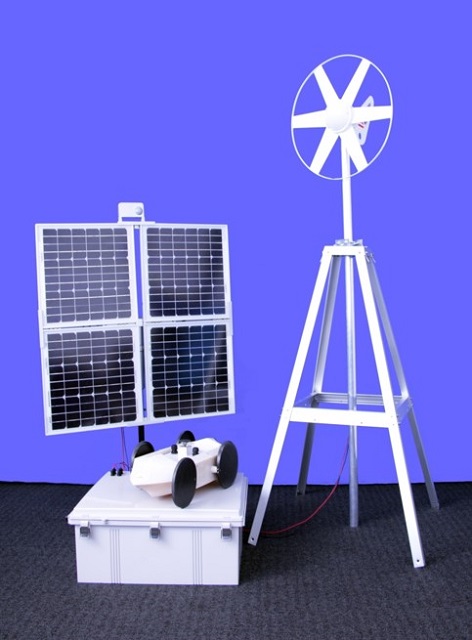 |
By the wireless charging from the charge station, the robot can obtain energy. It is difficult that the robot that is running in outdoor obtains energy. But, by supplying the energy stored in the charging station to robot, it enables stable running. |
● New wheel
|
|
We proposed
a new type of wheel for climbing steep slopes. The robot can
climb a slope of 36 degrees, and also climb 180mm tall steps. We can operate the robot in a variety of environments such as forests and river side area using this new wheel. |
● Surface estimation
|
|
A method of
estimating the hardness and unevenness of a surface condition
for a tiny mobile robot was designed using simple sensors. This robot can avoid the soft surface such as swamps, and move on uneven ground such as a heap of rubble by slowing down. |
●
Extendable arm

|
We
developed an expandable arm for WAMOT that houses the sensor on its
housing. The arm is made of convex steel tapes and it can lift sensor up
to the height of 4 m from the ground. |
●
High efficient and navigatable supply
station

|
A new power supply station that is added a navigation system is developed so as to improve the efficiency of power supply. The efficiency is improved by changing the way of power transmission from wireless-type to contact-type. The navigation system using lasers is also developed so as to navigate WAMOT to the station with a high degree of accuracy because it is difficult for the robot to contact with only GNSS. The lasers are mounted on the top of the station and the receiver is implemented on the head of WAMOT. and WAMOT is navigated with these. |
● Monitoring in forest
.png) |
We
developed effective path planning and locomotion control for WAMOT in forest area. WAMOT selects a safe
route from the cost map of forest area. The cost can be obtained by measurement of geographical
information. |