高西研究室
環境モニタリング班
ーWAMOTー
WAMOT
● 目的
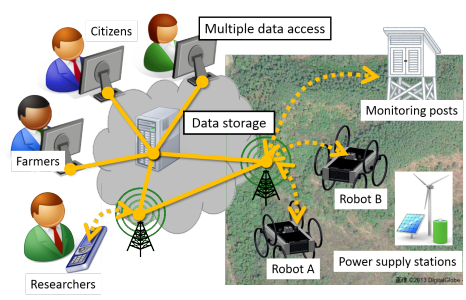 |
この研究では、屋外環境下で放射能汚染や土壌汚染、そしてそれにともなう野生の動植物の変化のモニタリングを行うロボットシステムを構築することを目的としています。具体的な運用イメージとしては、屋外環境下に複数台のロボットを投入し、それぞれのロボットが協力し合い自律で環境のモニタリングを行うことを想定しています。ロボットは観測したデータをサーバーにアップロードし、使用者はサーバーを通してそれらのデータを閲覧できるようにします。また、緊急時には使用者がロボットに直接アクセスし、リアルタイムのデータを得たり、遠隔操作によってロボットを操縦します。われわれは、得られたデータから環境モニタリングマップや動物の生態マップを作成しようと考えています。 |
● システム概要
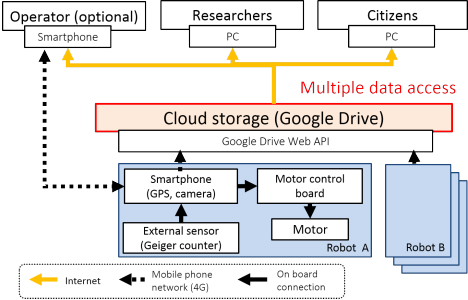 |
われわれは上記のようなイメージを具体化するために、図のようなシステムを構築しました。ロボットから送られるデータの通信、ロボットの遠隔操作を携帯電話回線を利用することで実現しています。また、データを蓄積するサーバーを公共のクラウドシステム(Google Drive)を用いています。これら既存のインフラ設備を利用することで、ロボット開発における導入コストを削減しています。 |
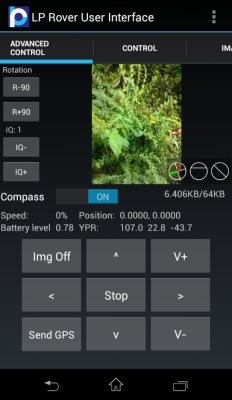 |
ロボットは開発されたスマートフォンのアプリにて操縦することが可能です。操縦者は図のような操作画面からロボットを操縦します。 |
● 機構
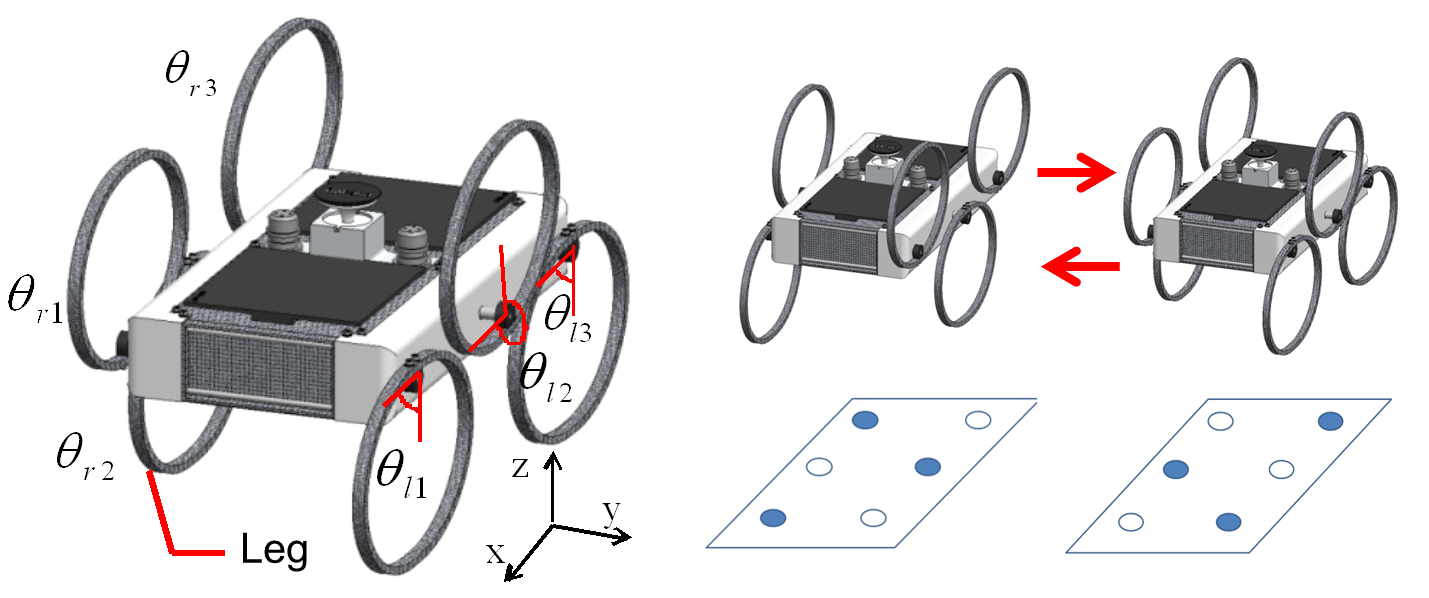 |
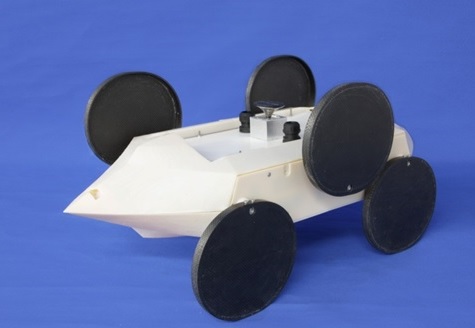
ロボットの動作は図のようになります。ロボットの左右の側面には、3本づつ合わせて6本の楕円型の脚がついており、これらの楕円脚が軸を中心に回転し、脚が地面を蹴り走行をしています。 |
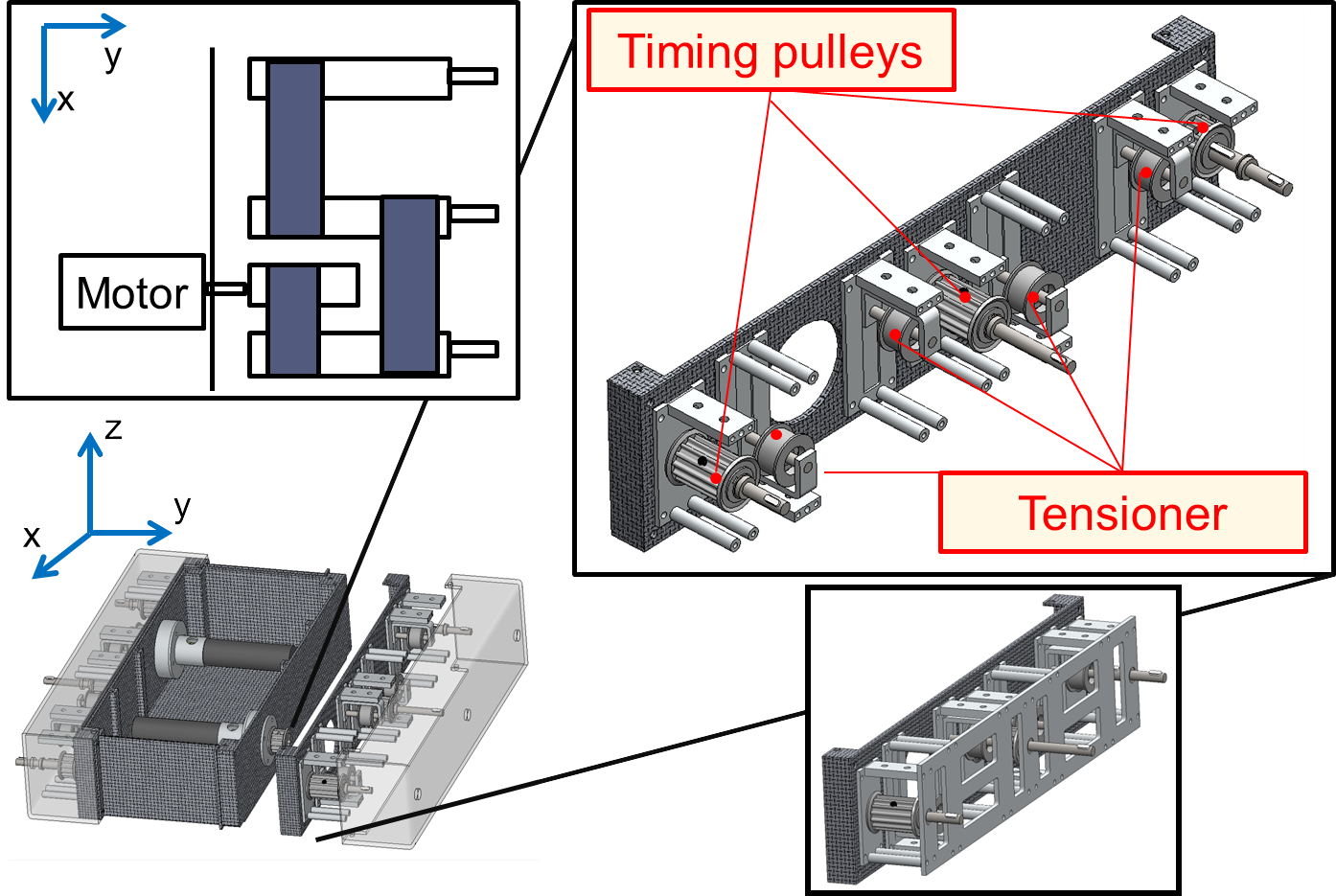 |
左右それぞれ3本の脚軸は、ベルトでつながっており、1つのモータで連動して動きます。それによってモータの数を減らすことができ、コストの削減、制御の簡素化、メンテナンス性の向上が見込まれます。 |
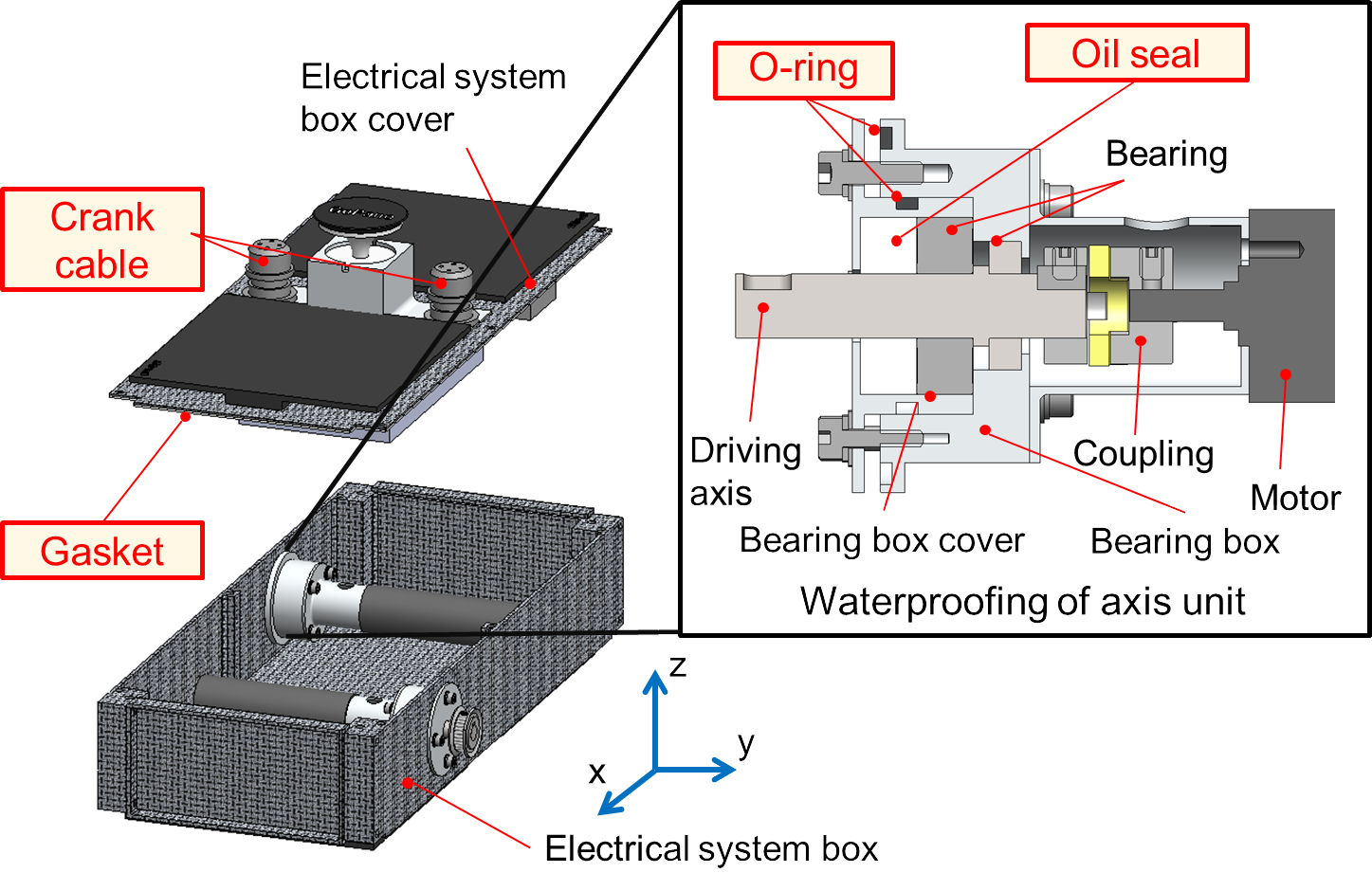 |
屋外環境下でも動作するよう、防水・防塵性にも着目して設計をしています。バッテリーやマイクロコントローラーなどの電装部品が配置される電装箱は、一体部材になっており、電装箱の蓋との連結部分にガスケット、箱の外へケーブルを出す部分には防水用のクランクケーブルを用いています。また、防水が困難なモータ軸部分には、Oリングとオイルシールを用いています。ロボット全体としてIP55程度の防水性(生活防水程度)が得られる設計となっています。 |
● 山林走行用外装
 |
ロボットには砕氷船を参考に開発された外装を取り付けることができます。この外装は、ロボットが笹や葦のような、走行の障害となるようなものが多く存在する山林や河原などの環境を走行する場合に、前面の障害物を排除しながら前進させる機能を持たせることが可能です。
尚,ロボット外装に使用さえているCFRPに関しましては,NiKKi Fron株式会社様にご提供いただいております. |
● 充電ステーション
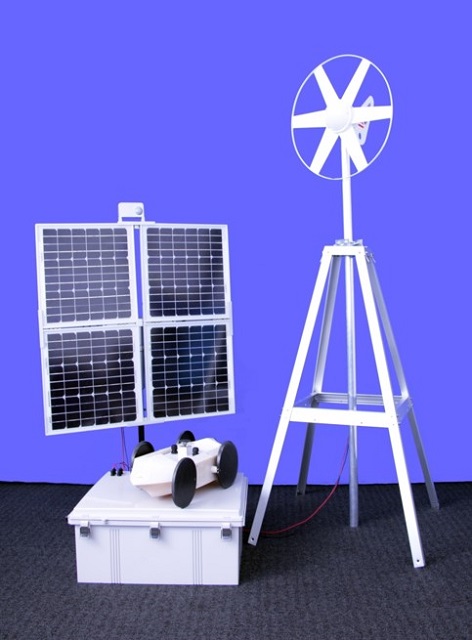 |
ロボットは、充電ステーションからワイヤレス給電により、エネルギを取得することが可能です。屋外環境で稼働するロボットは、エネルギの取得方法が問題となります。屋外環境において、エネルギを取得する方法として、太陽光パネルによる取得方法が有効です。しかし、森林など太陽光の届きにくい場所でのロボット運用では、ロボット稼働に十分なエネルギを取得すことは困難となります。そこで、常にエネルギを蓄積できる環境に充電ステーションを設置し、ステーションからエネルギをロボットへ供給することにより、安定した運用を可能にします。自然エネルギの不安定性を考慮し、太陽光パネルと風力発電機を組み合わせた仕様となっています。 尚,ワイヤレス給電技術に関しましては,株式会社アドバンテスト様より技術提供いただいております. |
● 急斜面登坂可能な車輪
|
|
急斜面登坂可能な車輪として新たに切りかけ車輪を提案いたしました。この車輪を用いることでロボットは36度の傾斜を登坂することができ、
また180mm程度の段差の乗り越えも可能となりました。これにより、山林や河川敷のような急斜面がある環境でもロボットを運用することが可能となりました。 |
● 路面状況の推定
|
|
ロボットは路面環境を認識しながら走行をすることができます。小型のロボットに搭載できるIMU、電流測定器、モータのエンコーダ
を用いて、路面の硬さや荒さを推定することができます。これによりロボットは沼などの軟弱路面を回避しながら走行することができ、また瓦礫などの不整地路面上では速度を落として転倒するリスクを削減することができます。 |
● 追加モジュール:伸縮アーム

|
モニタリング用のセンサを胴体内部に収納するしかなかったWAMOTのために、センサを昇降可能な伸縮式アームを開発しました。鉄製テープメジャーのような巻取り式の機構を採用することで、地面から4メートルの高さまでセンサを持ち上げることが可能です。 |
● 自律的・高効率給電可能な充電ステーション
 
|
WAMOTを充電する従来の充電ステーションから、より高効率給電ができ、かつWAMOTを充電ステーションに誘導する機能を搭載した新たな充電ステーションを開発しました。従来の充電ステーションからより高効率な接触給電方式を用い、接触給電の検証を行ないました。また、WAMOTに搭載されているGNSSの精度のみでは接触給電することが難しいため、充電ステーションに線上に照射されるレーザを取り付け、WAMOTに受光器を搭載し、レーザによる誘導の検証を行ないました。 |
● 森林内でのモニタリング
.jpg) |
森林内でもWAMOTが効率的に移動することができるように、経路計画の検討を行いました。森林内の草の植生度合いを数段階で分け移動コストとして計算することで、WAMOTにとって最も危険の少ない移動経路を算出します。 |