Takanishi Lab.
Monitoring Robot Group
ーAnimal monitoring robotー
● Objective
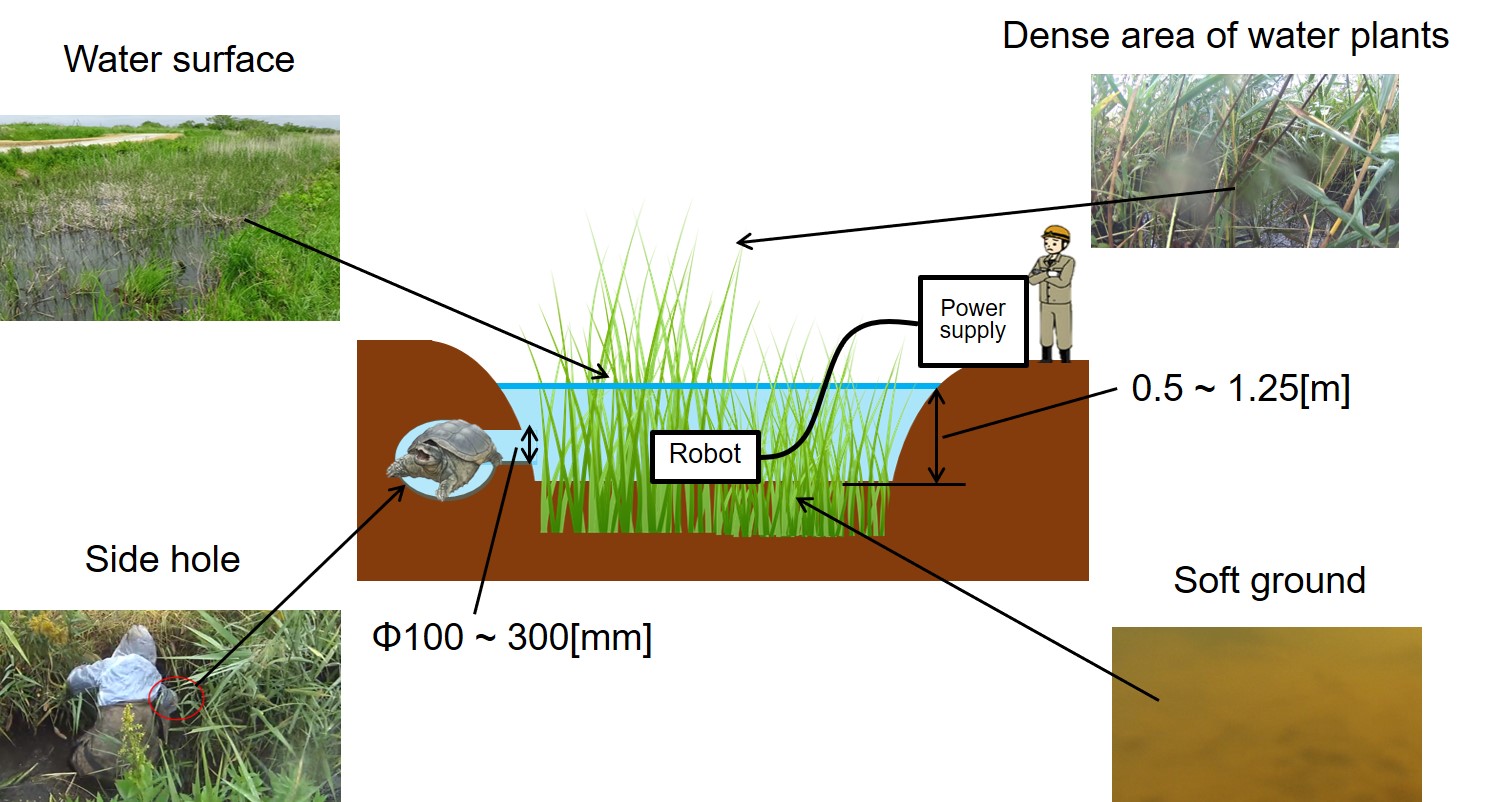 |
The objective of this study is to expand the environmental monitoring regions by using a new type of robot. The intended regions cover the wetland, such as Inbanuma, shown in the left figure. Many snapping turtles, one of the invasive alien species, inhabit in this wetland. Effort is being made to get rid of the snipping turtles since they are highly prolific and are destroying the ecological system of the wetland. The traps called “mondoriwana” are set to capture the snapping turtles but they have little success especially when the temperature drops the turtles stop moving. Going into the swamp and groping for the snapping turtles is the only other way to detect them. However, groping in the swamp is a heavy work. Our goal is to reduce the workload and increase the number of captured snap turtles by using a small mobile robot. Presumed environment condition is a swampland inundated by water and with reeds growing in clusters. |
● Movement Mechanism
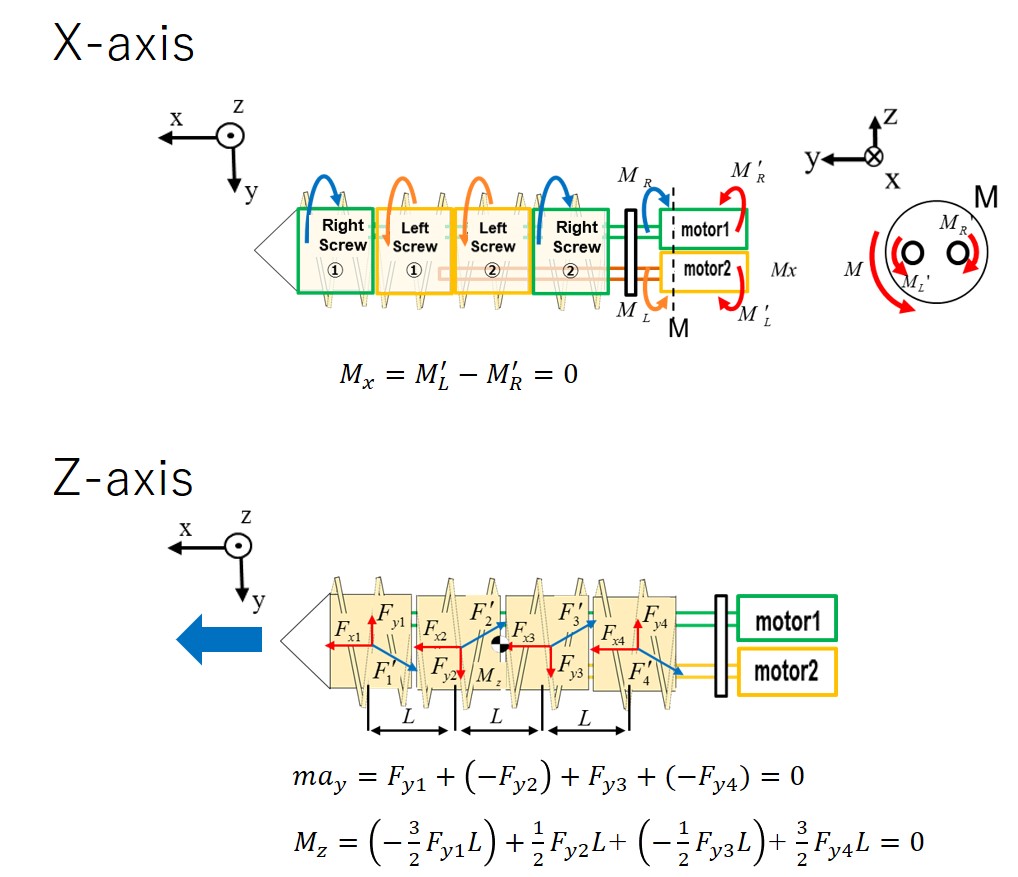 |
For the robot be able to move on the soft surface and force its way through clusters of water plants, the new function had to be added to the robot. Archimedes’ screws made it possible to move smoothly on the soft surface and plow its way through the water plants. Four Archimedes’ screws were connected in series to the robot. |
● Developed Robot
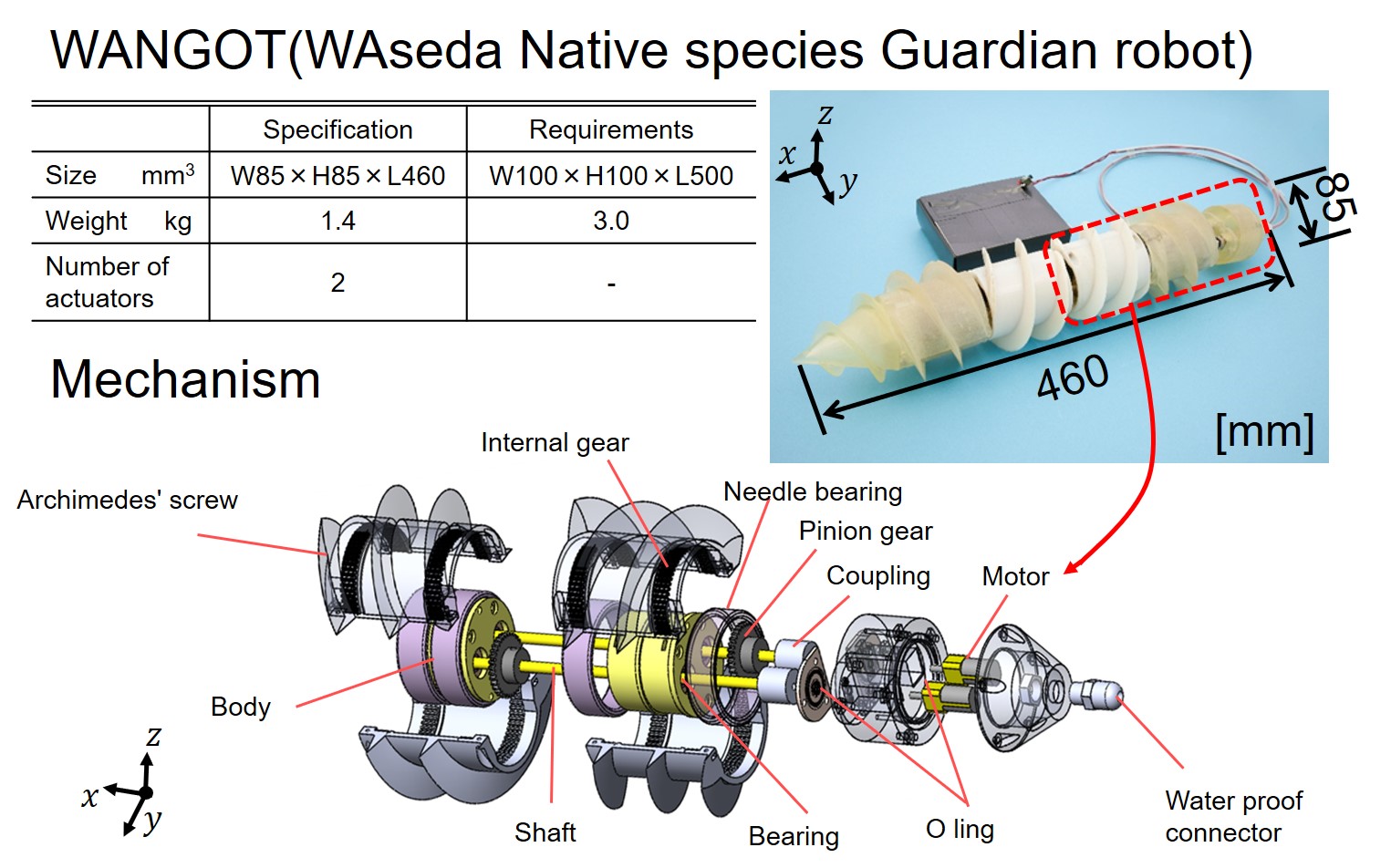 |
Based on the above research, we developed the compact mobile robot. It’s size and weight are suitable for an adult to carry. |
● WANGOT
|
|
We did some experiments to see how the robot actually moves. The robot pushed its way through the dense stands of waterplants. You can also see the robot moving foward on the soft ground. |