高西研究室
環境モニタリング班
ー動物モニタリングー
● 目的
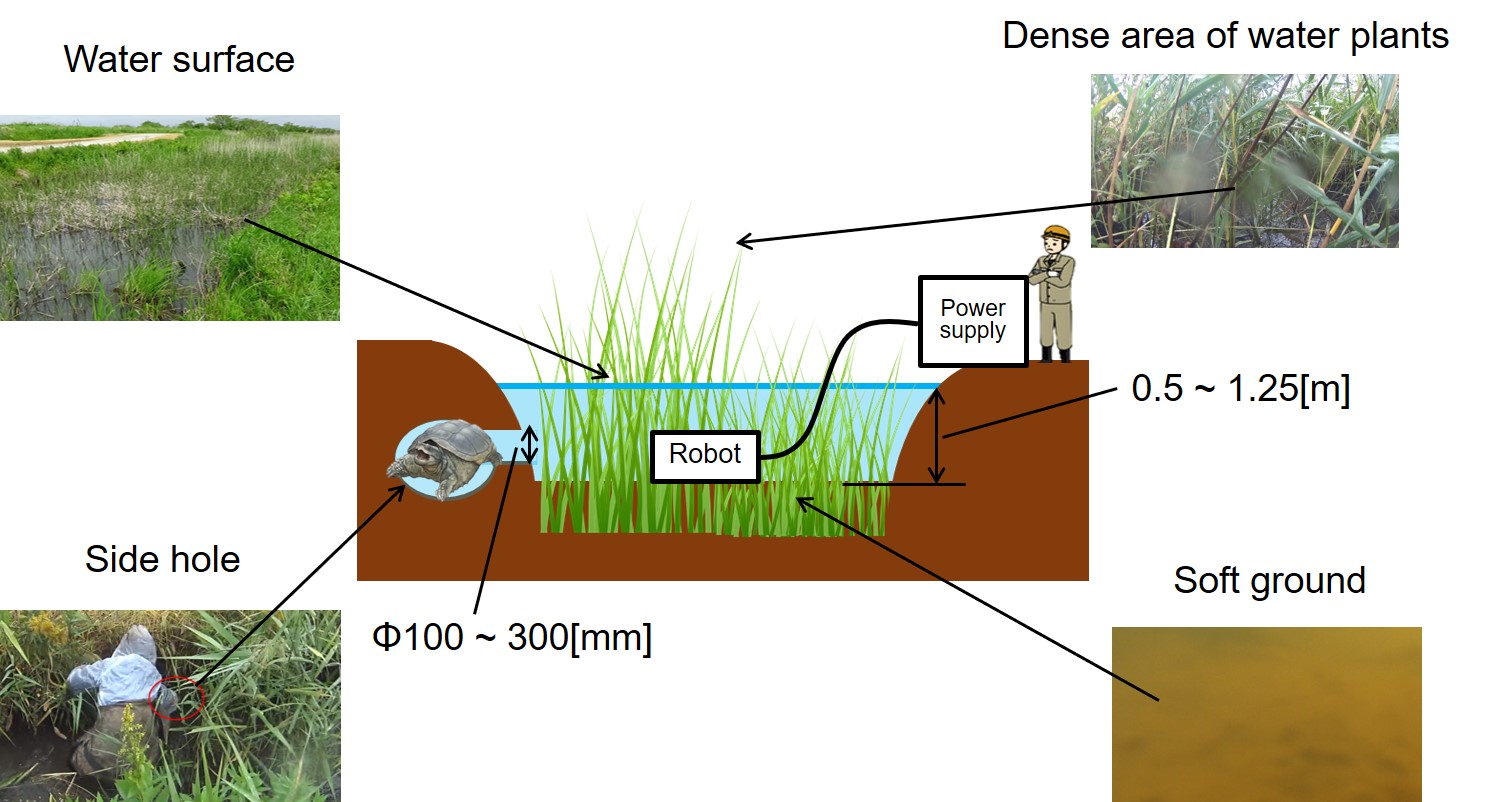 |
この研究では、従来のロボットでは対応できない環境を観測できるようにすることでモニタリング可能な観測範囲拡張を目的としています。対象とする環境は、印旛沼をはじめとする左図のような湿地帯で、ここには特定外来種であるカミツキガメなどが生息しています。雑食で繁殖力が強いカミツキガメは、大量に定着することでその流域の生態系を破壊してしまうため、防除対策が行われています。従来の方法では、「もんどり罠」と呼ばれる据え置き型の罠が使用されていましたが、気温が低下すると効果が薄くなるため、能動的な防除方法として人が沼に入って「手探り」による防除対策が行われています。人が手探りでカミツキガメを探すことは非常に体力的な負荷がかかるため、小型移動ロボットを用いてカミツキガメを発見することで、労力の代替と防除効率の上昇を目指します。想定する環境は水の張った沼地に、葦が群生している湿地帯としています。 |
● 移動機構
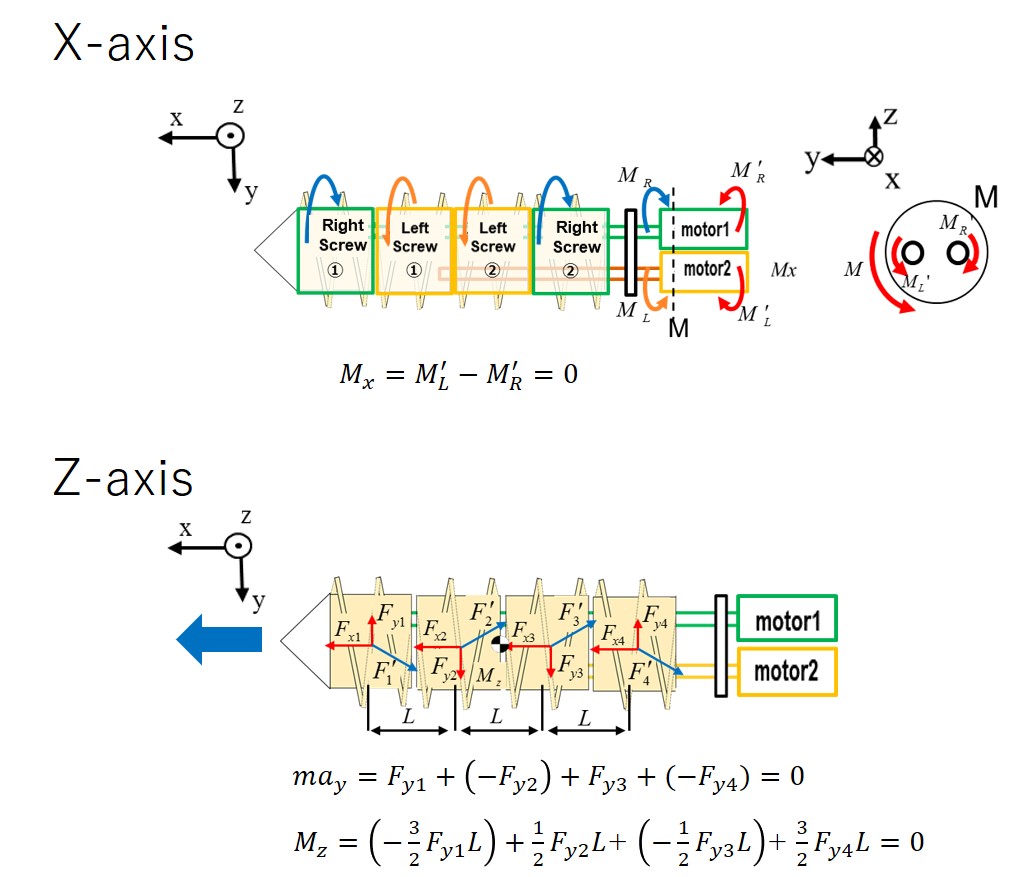 |
ロボットが想定する環境を移動するためには軟弱路面の移動と水草の密集地の移動を実現する必要があります。これらの機能を実現するため、軟弱路面の移動と水草をかき分けながら進むことができるアルキメディアンスクリューを直列に四つ配列した機構を用いました。 |
● 開発したロボット
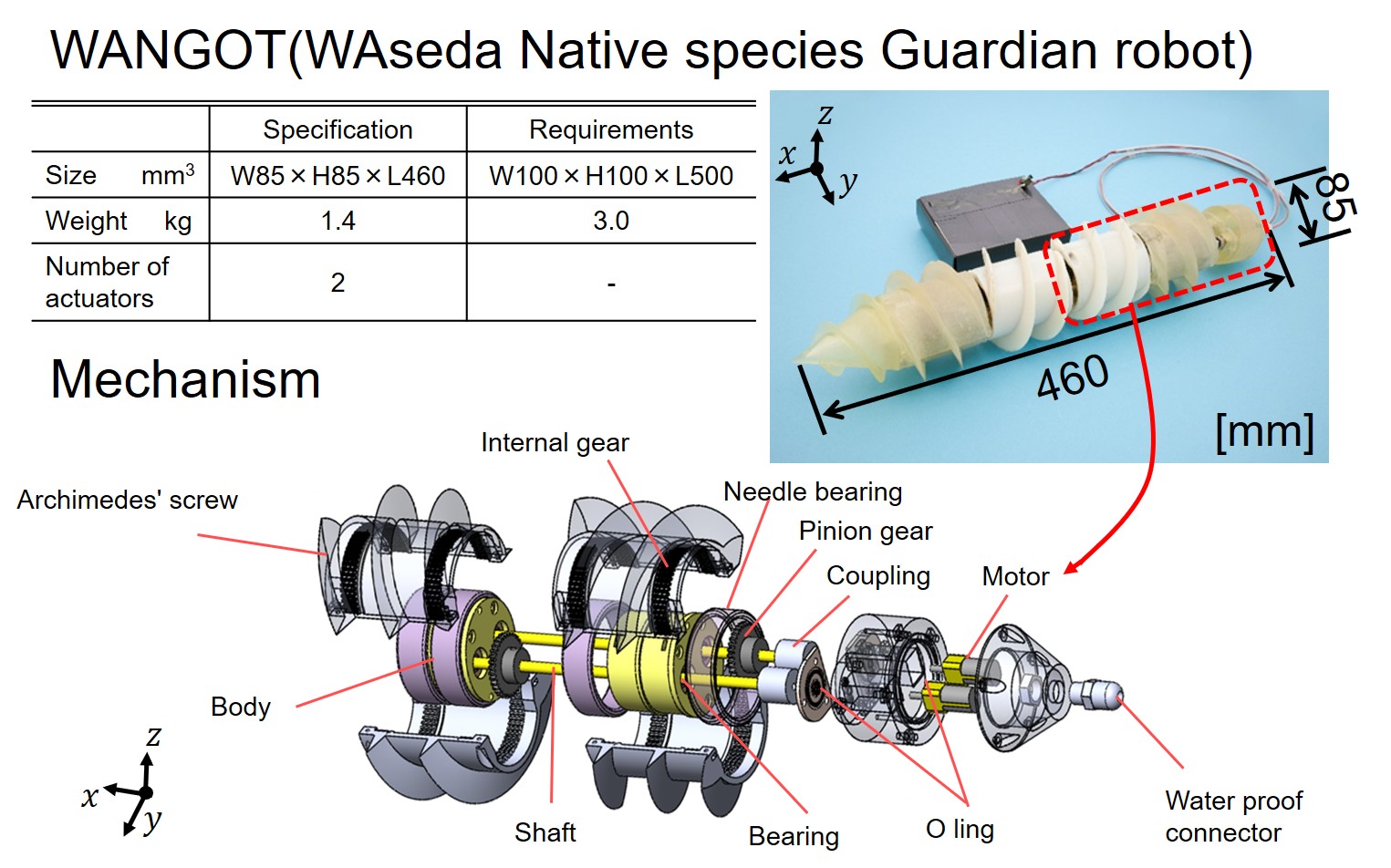 |
上記の研究を元に、小型移動ロボットの開発を行いました。大人一人が持ち運ぶことのできるサイズ・重量としました。 |
● WANGOT
|
|
移動実験を行いました。水草の密集地を模した環境では水草を掻き分けるようにして前進している様子が確認できました。また軟弱路面上ではねじを切るようにして前進していることが分かります。 |