Takanishi Lab.
Monitoring Robot Group
ーLunar pit exploring robotー
● Our research team goals
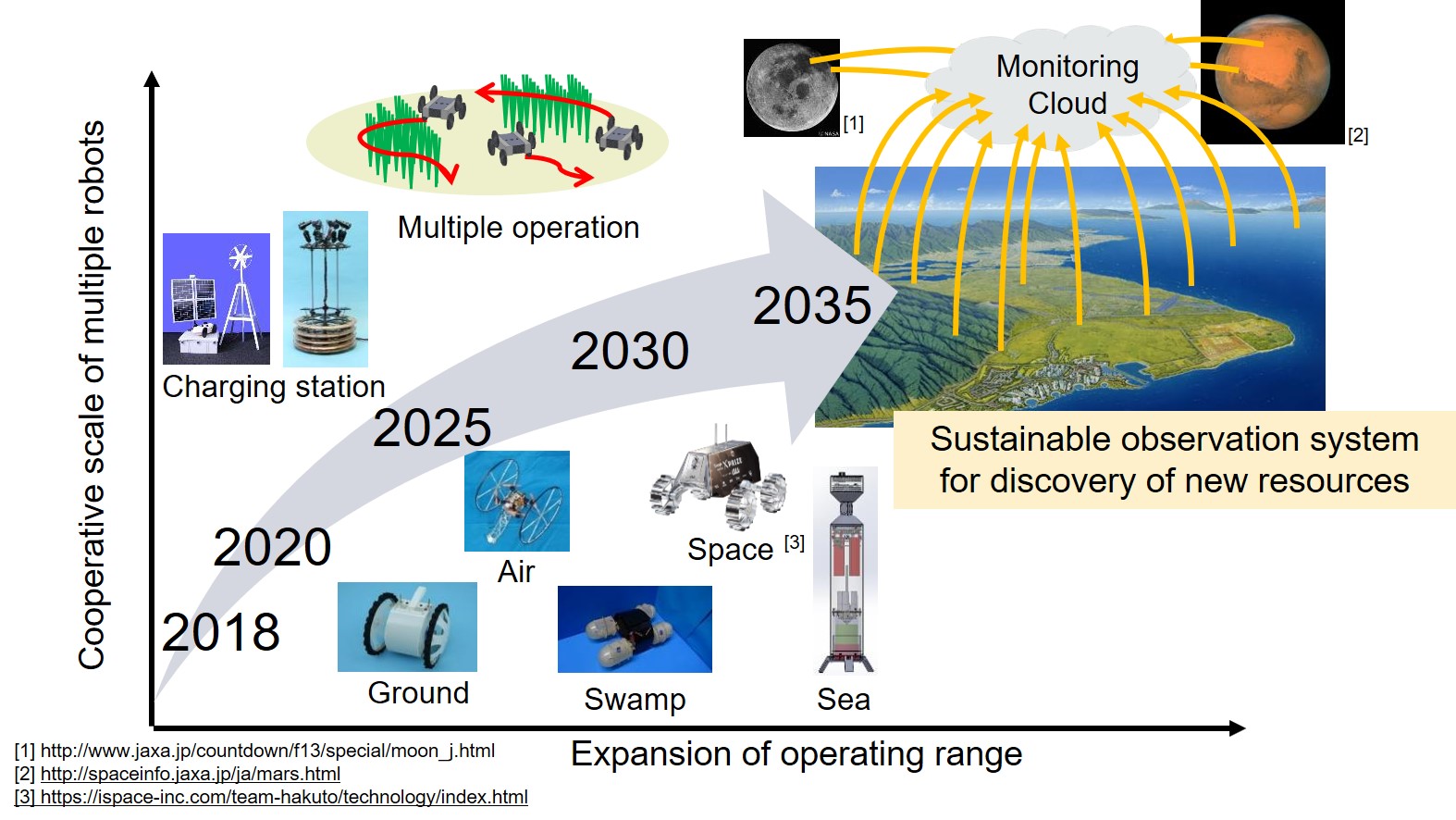 |
We aim to construct a complex monitoring system using various autonomous mobile robots. Up to now, our research has been conducted on the assumption of exploration in forests and swamps. However, in recent years, the demand for monitoring and exploration in various environments is increasing. It is necessary to construct a more advanced observation system by expanding the operation range of robots and using multiple robots in combination, and study a sustainable environmental observation system for the discovery of new resources. |
● Lunar pit
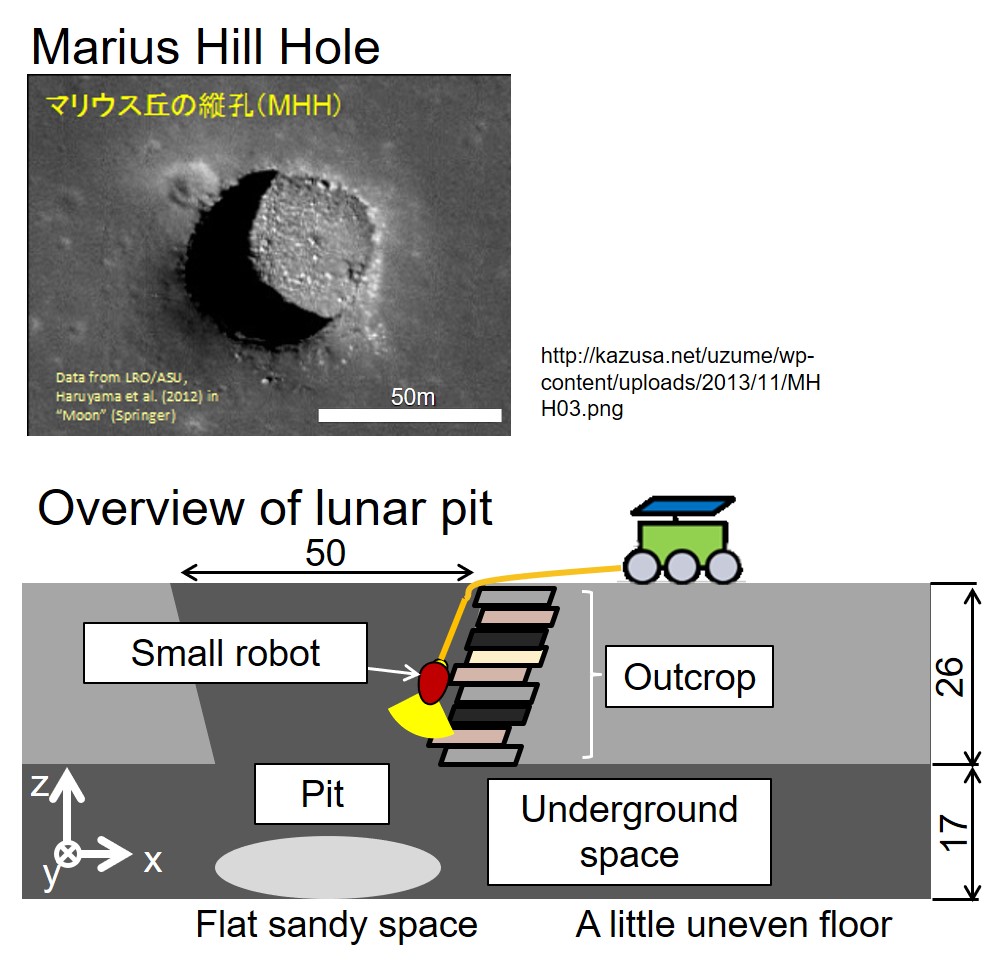 |
The lunar pit is a hole that is vacant on the lunar surface, and it is estimated that an underground cavity is spreading at the bottom. Both pit and underground cavities are places of great scientific interest, and the underground cavities are expected to be used as a lunar base in the future. In particular, the wall surface of the pit is considered to be a very interesting place scientifically because it is considered that the strata structure is exposed. In this research, we are developing a small robot that explores the wall of the pit. |
● Movement mechanism
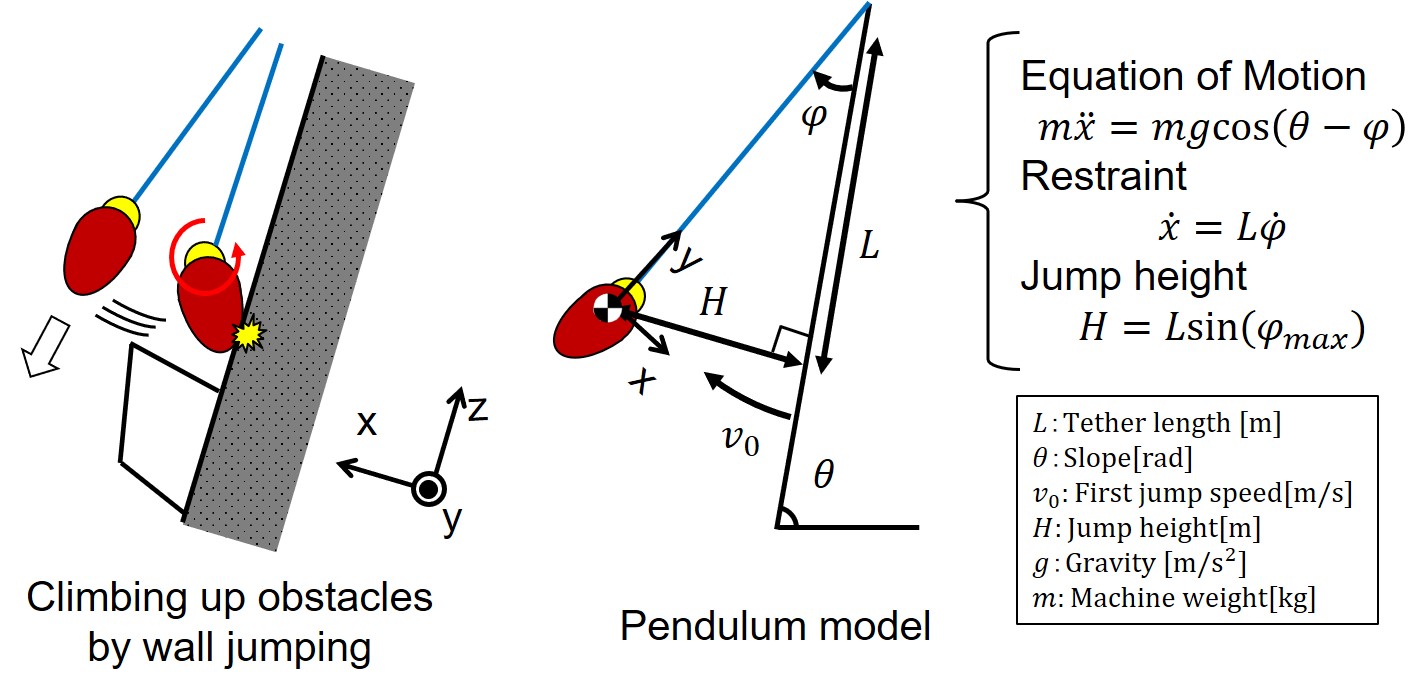 |
The following three functions were implemented in the robot to move on the wall and conduct exploration. Up and down by tethers and winches, running on slopes by wheels, and wall jumping to overcome obstacles that cannot be overcome by former 2 functions. The pit is a hole that is vertically open, so a stable exploration requires a descent while supporting its own weight with a tether. On the other hand, the robot moves by running at the slope existing at the top of the hole. Wall jumping is used when there are obstacles that cannot be overcome by former two movement methods. This movement is to first kick the wall with a wheel to generate a pendulum action, and then go up and down with a winch in the middle of the air to overcome the obstacle. It can be said that the movement performance, which is a disadvantage of small robots, is compensated by taking advantage of the low gravity of the moon. |
● Attitude control system
|
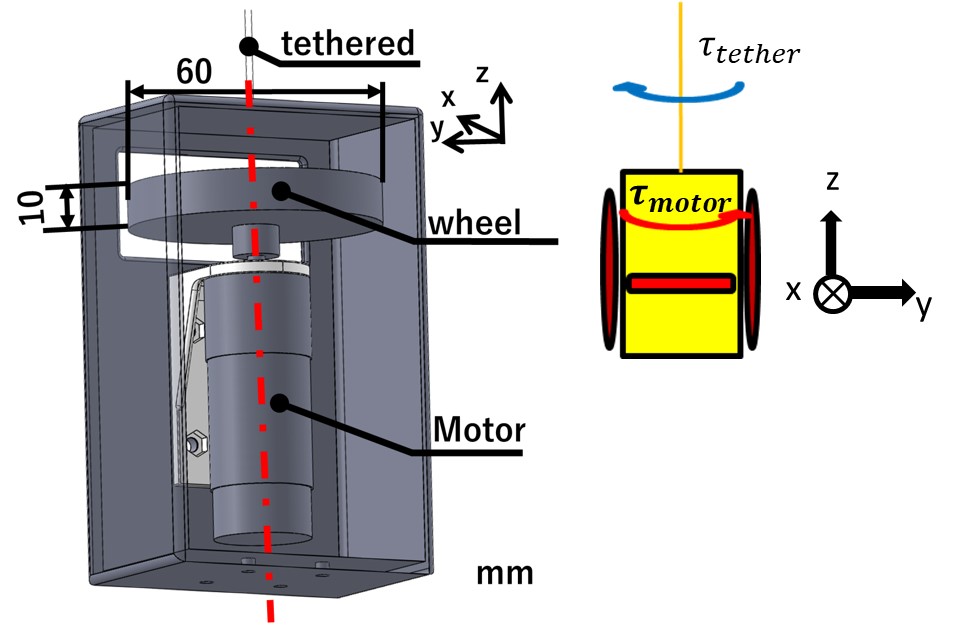
When the robot moves up and down on the wall by tethers and winches, it is necessary to stabilize the attitude of the aircraft. And, the robot needs to change the attitude to get some information. So we implemented attitude control system used reaction wheel in this robot. In this study, we implemented only one axis around the tether, because considered that attitude control around the tether was most necessary. |
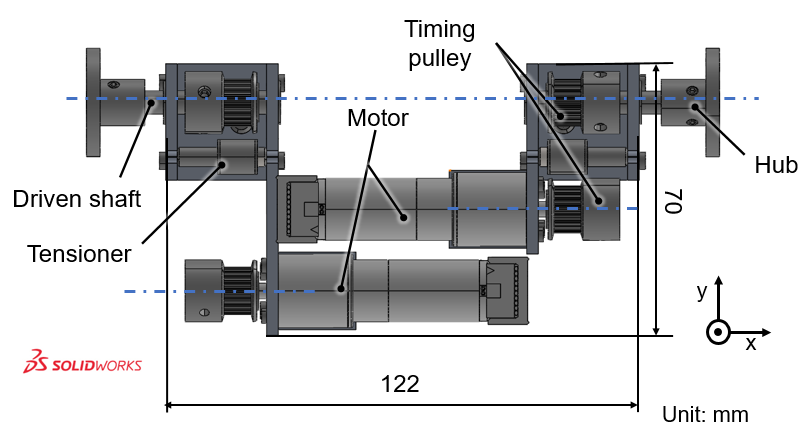
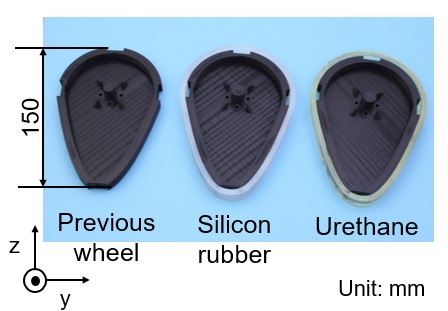
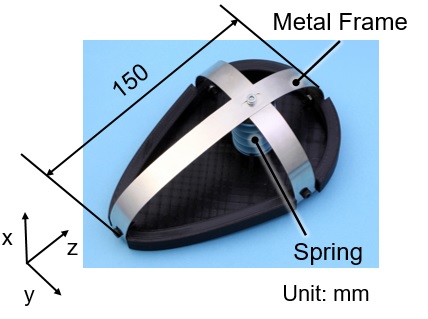
● Improved impact resistance
|
In the exploration scenario, the robot is expected to penetrate into the moon pit by throwing and to explore the uneven moon pit wall of about 1 to 2 meters. Conventional robot may be damaged by the impact of falling when landing after throwing or when moving during exploration, making it difficult to carry out the mission. In order to improve the impact resistance of the robot, we improved the drive/power transmission parts and the wheel parts. In the improvement of the drive/power transmission parts, timing belt drive was used to prevent direct transmission of impact force to the motor shaft, and the shaft diameter was increased to improve strength. In the improvement of the wheel part, we aimed to increase the collision time and reduce the maximum impact acceleration by attaching resin materials to the edge of the wheel and attaching metal frames and spring to the side of the wheel. Measurement experiments of acceleration during a drop confirmed the effectiveness of these improvements. |
● Developed robot
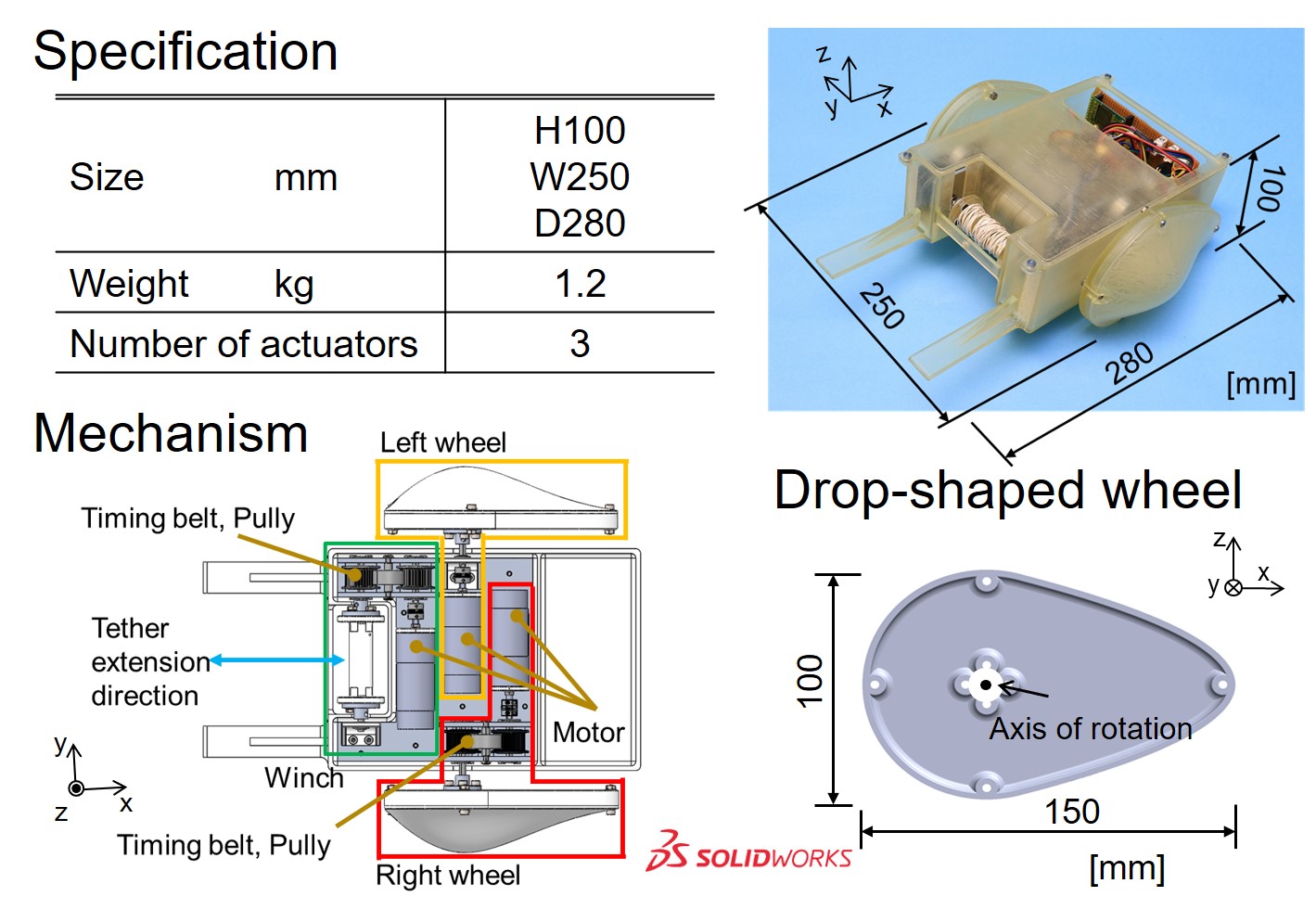 |
We have created a robot that implements the above three functions. In order to realize the running and jumping on the same wall with the same wheel, the shape of the wheel was made like a water drop, ridge with a circular part. By devising the wheel shape in this way, the moving performance can be improved without increasing the number of actuators and weight. |
● WAPIT
|
|
A movement experiment was conducted using the developed robot. 20[cm] overcoming performance by wall jumping was possible against 7.5[cm] by running, and performance exceeding that of simply running was achieved. In addition, an outdoor demonstration was conducted, and it was found that it was possible to descend and ascend on a rock wall of 1.8[m] as a similar environment. |