Takanishi Lab.
Monitoring Robot Group
ーAnimal monitoring robotー
● Objective
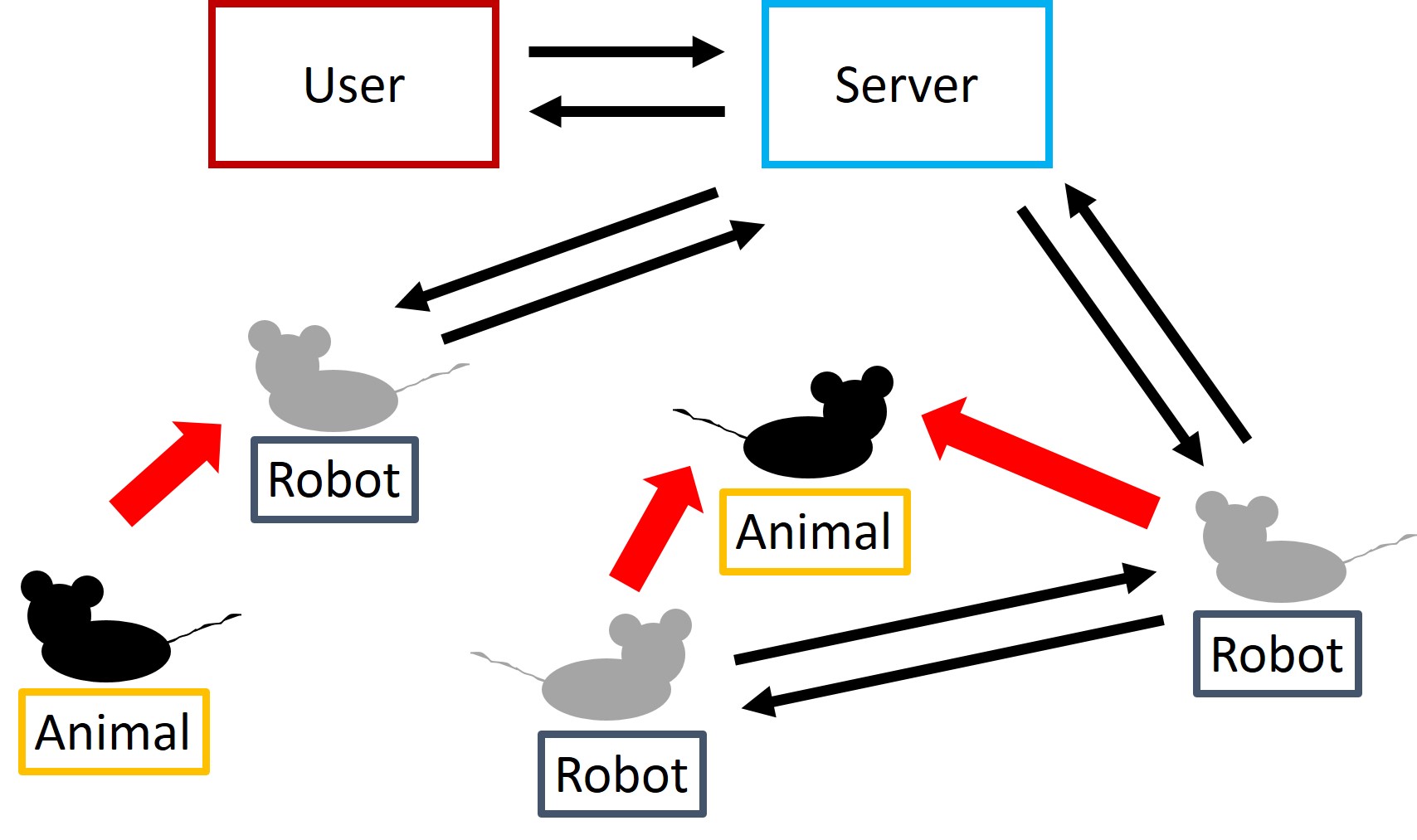 |
The objective of this study is to develop a wild animal monitoring system using small mobile robots. We are now developing a system consisting of multiple mobile robots, which have locomotive performance on uneven surfaces and sensing abilities to monitor environment. These robots corporate each other to obtain much data for environmental monitoring. Data obtained by the robots are stored in a server on the cloud. Therefore, users can easily access the data on the server, and control one of the robots. We are interested in create maps of the ecosystem using the data. |
● System overview
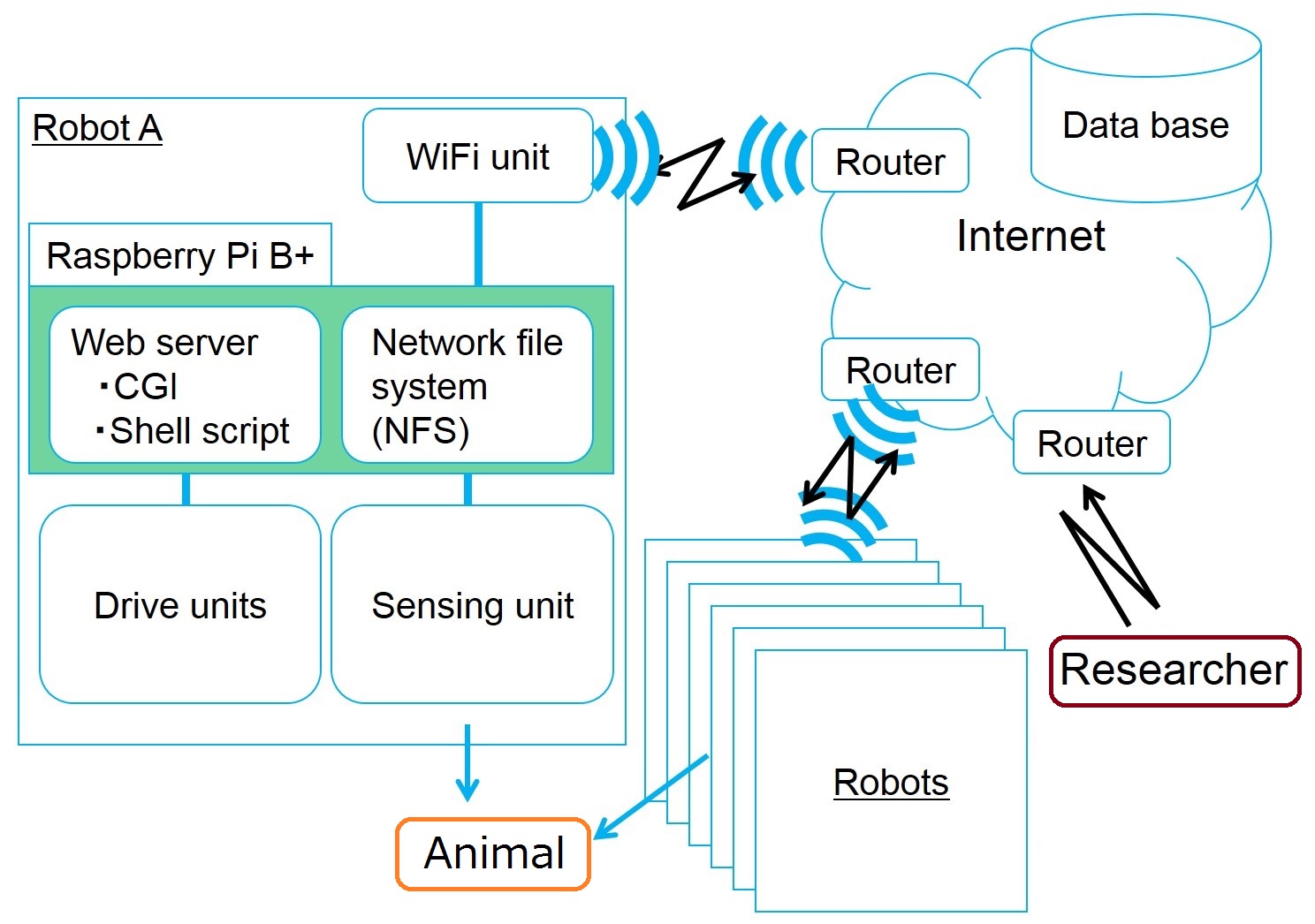 |
System overview is shown in the left picture. We use public cloud system as a server to storage monitoring data. |
● Movement Mechanism
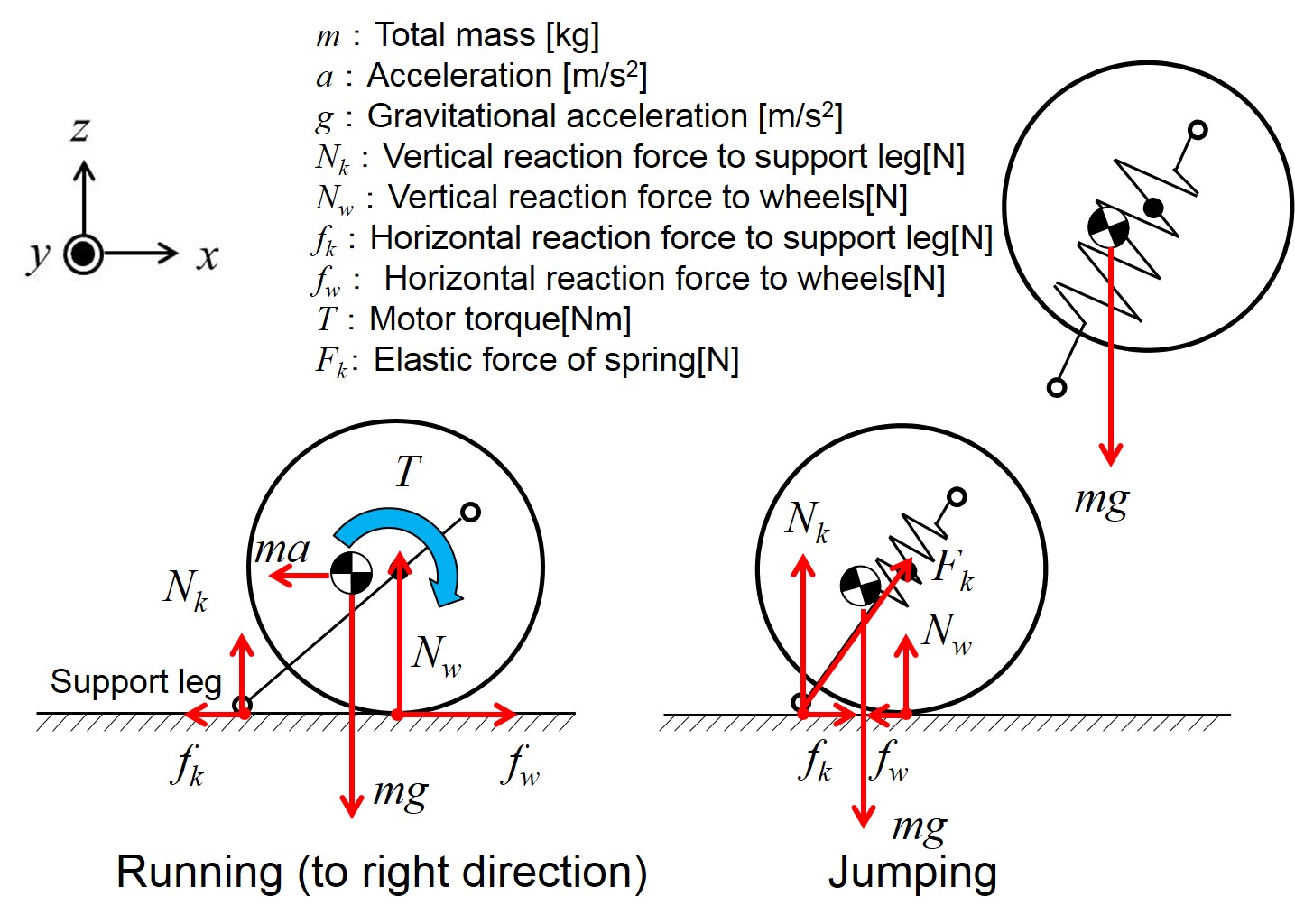 |
Monitoring robots for small animals should be small and have high mobility. We consider that the robot, which has two different movement mechanisms (Running and Jumping), is useful for animal monitoring. We then developed a novel robot which has these functions, as a platform of the monitoring robot. |
● WABEC
|
|
We have developed a small mobile robot for using outdoors. The robot
|