高西研究室
環境モニタリング班
ー動物モニタリングー
● 目的
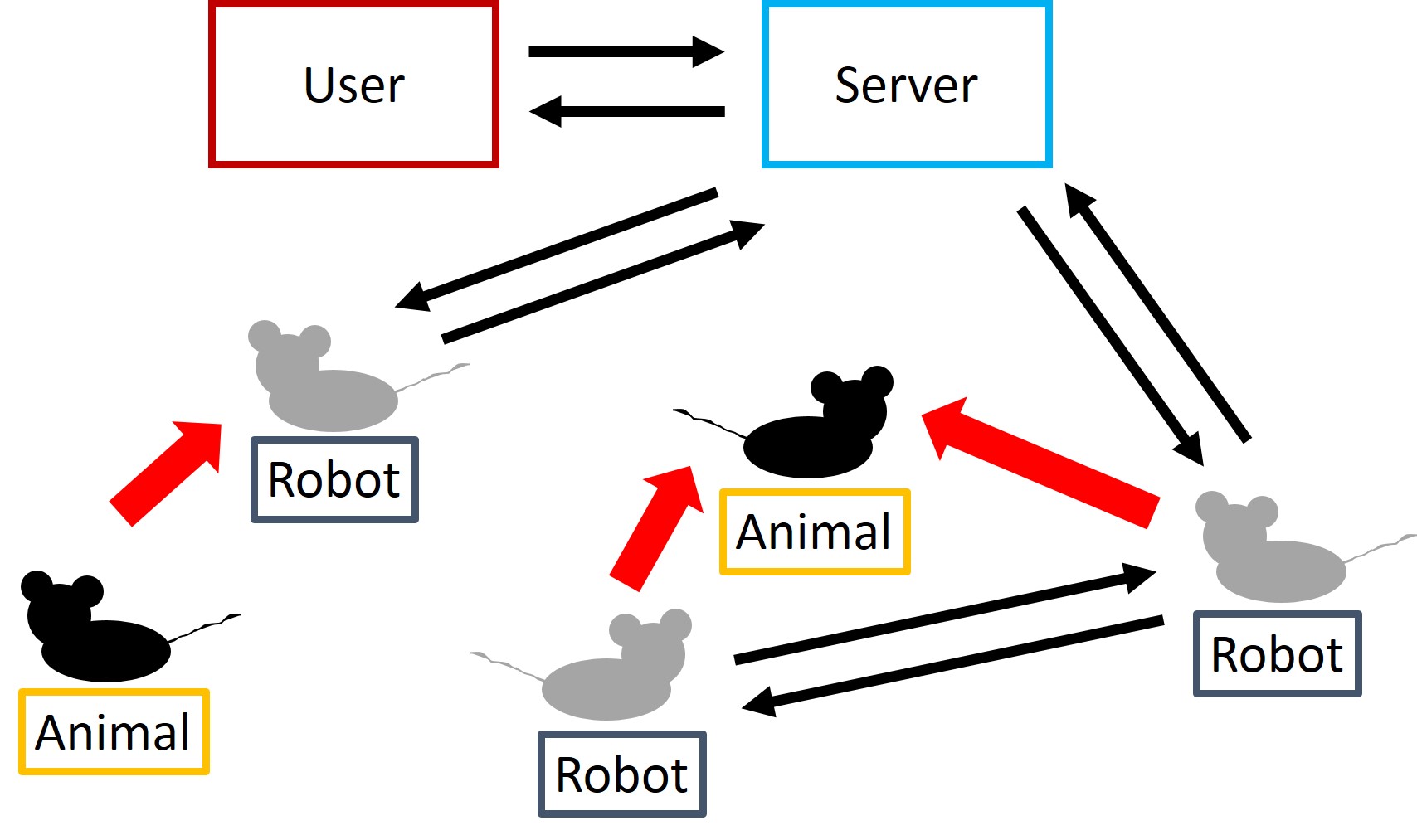 |
この研究では、屋外環境下で野生動物のモニタリングを行うロボットシステムを構築することを目的としています。具体的な運用イメージとしては、複数台のロボットを用いて、それぞれのロボットが協力し合うことで動物のモニタリングを行うことを想定しています。ロボットは観測したデータをサーバーにアップロードし、使用者はサーバーを通してそれらのデータを閲覧できるようにします。また、緊急時には使用者がロボットに直接アクセスし、リアルタイムのデータを得たり、遠隔操作によってロボットを操縦します。われわれは、得られたデータから動物の生態マップを作成しようと考えています。 |
● システム概要
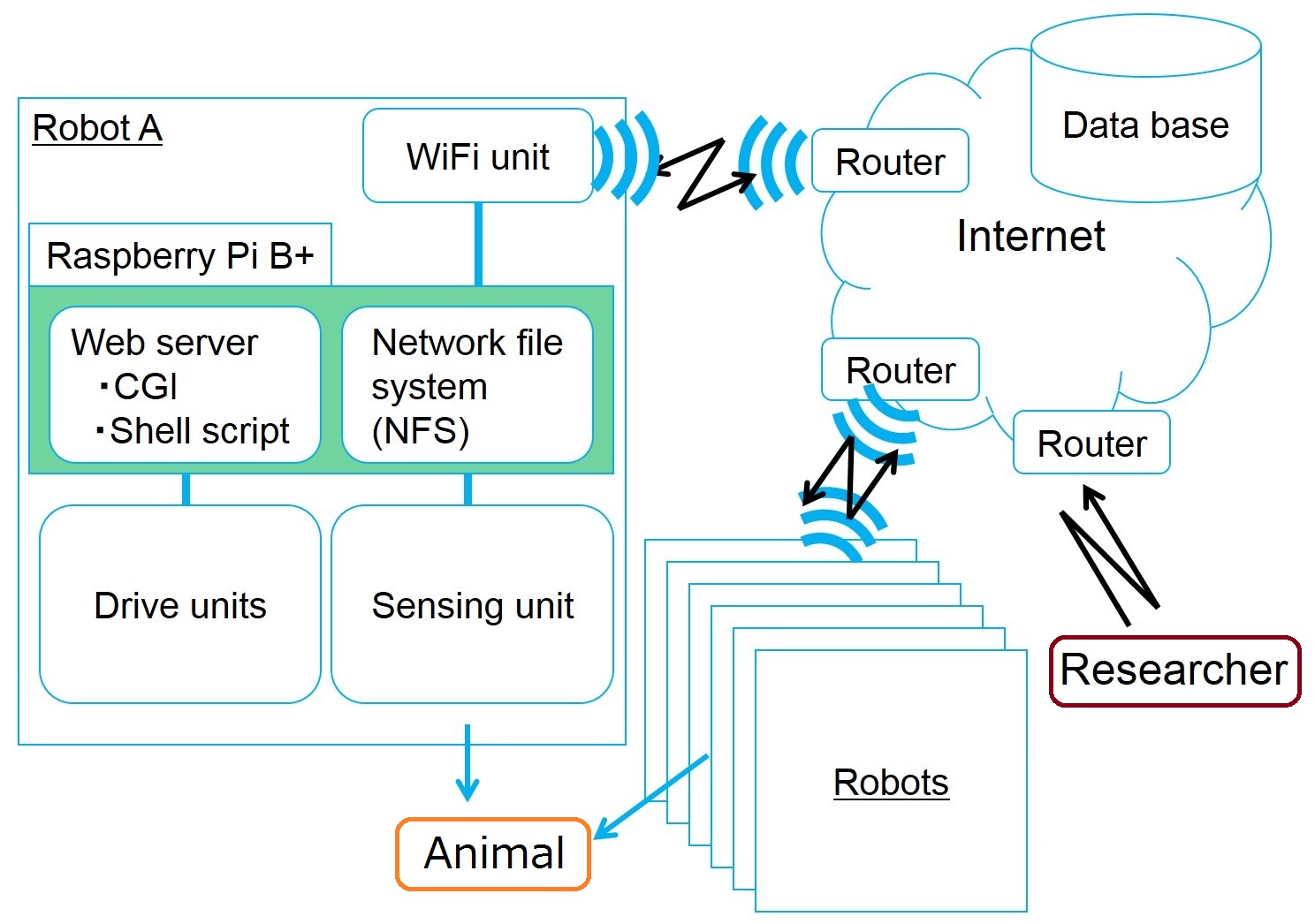 |
上記ようなイメージを具現化するために、左図のようなシステムを考案しました。クラウドを介して情報共有を行います。 |
● 移動機構
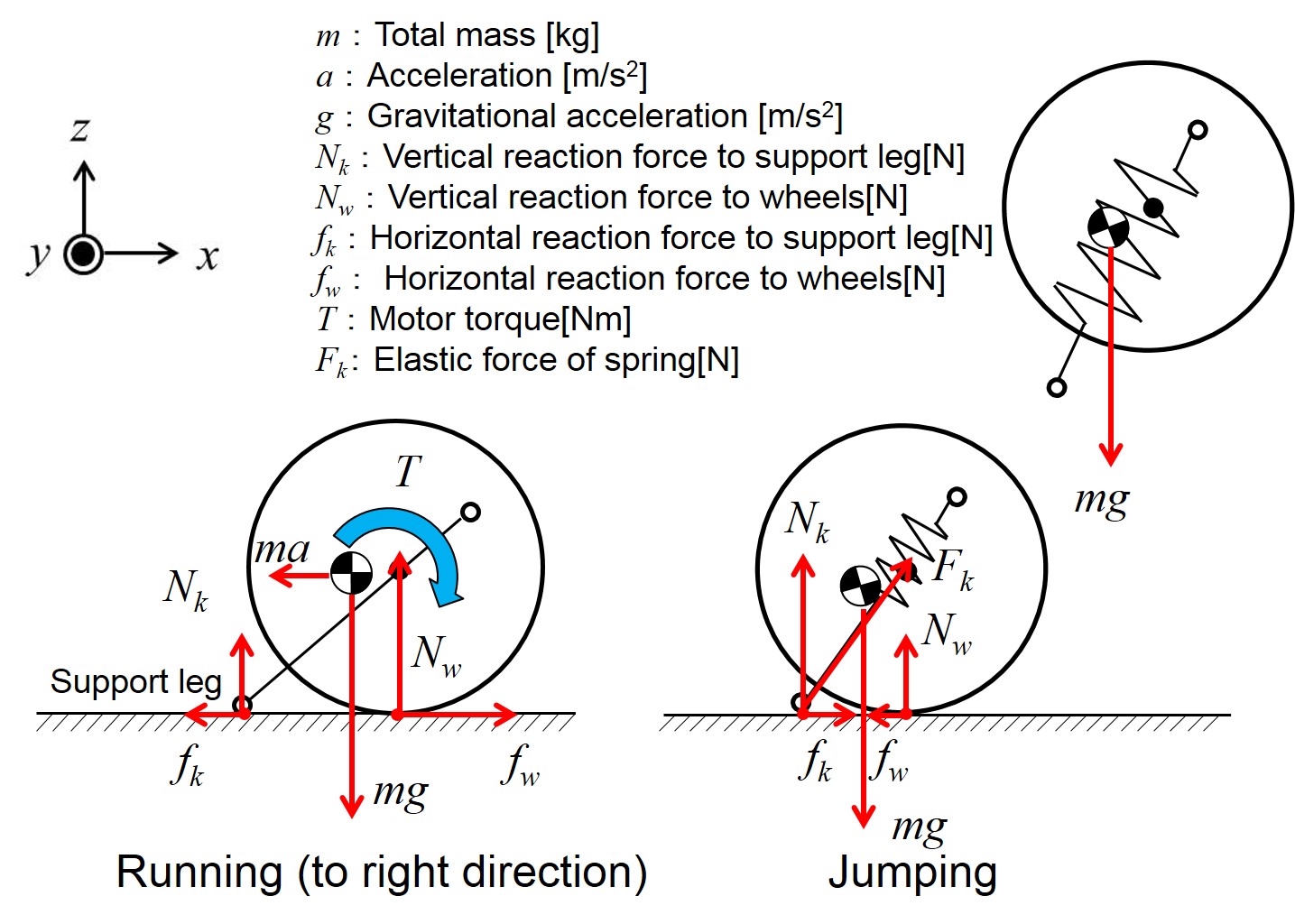 |
ロボット開発のプラットフォームとしてこのような機能を持つ小型ホビー用ロボットを用いることとし、このロボットの屋外での運動性能向上に関する検討を行いました。小動物をモニタリングするためのロボットは小型かつ屋外での高い運動性能を有する必要があります。そこで、走行・跳躍の2つの移動機能を持たせることが有効であると考えました。比較的平坦な路面は走行モードで移動し、 ロボット自身よりも高い段差などは跳躍モードで移動するという移動が可能なためです。開発に際しては、走行と跳躍が可能な小型ホビー用ロボットをプラットフォームとして用いることとしました。このロボットは、車輪による走行と脚による跳躍が可能ですが、草地などの屋外環境下での移動能力は限定的です。そこで、このロボットの屋外での移動能力を強化する方法について検討を行いました。 |
● 動物モニタリングロボットWABEC
|
|
上記の研究をベースに、屋外環境で移動可能な小型ロボットを開発しました。1[m/s]で走行し、草地において高さ360[mm]の跳躍を行うことができます。また、走行中に跳躍を行うことができる、転倒状態から簡単に復帰できるなどの特徴があります。 |