|
WATHLETE-1
|
|
WATHLETE-1
|

Fig. 1 WABIAN-2R |
�{�������ł͂Q���q���[�}�m�C�h���{�b�gWABIAN-2R�iFig. 1�j���J�����C���Ղ�p�����G�ߐL�W���s�Ȃǂ̐l�Ԃ̕��s�^����͋[���Ă��܂����D������WABIAN-2R�͒���^����s�^���Ƃ������C�e�߂ɑ傫�ȏo�͂��K�v�Ƃ����^���������\�Ȃ悤�ɂ͐v����Ă���܂���D�܂��C����܂ł̊֘A�����ŁC�l�Ԃ̑��s�^���̓������\���ɖ͋[�ł��Ă��郍�{�b�g�͌�������܂���D |

Fig. 2 �l�Ԃ̖��ʂ̓��� |

Fig. 3 �l�Ԃ̑O�z�ʂ̓��� |

Fig. 4 �l�Ԃ̓����̓��� [G. Fleisig, 1999] |
|

Fig. 5 WATHLETE-1 (2016) |

Fig. 6 ���R�x�z�u�}�iWATHLETE-1�j |
||
|
|
||

Fig. 7 �������{�b�g (2025) |

Fig. 8 ���R�x�z�u�}�i�������{�b�g�j |
�@�@

Fig. 9 �V�X�e���\���} |
|
|
||
�������{�b�g |
||
�� �t�H�[�N�{�[���������̎w���f���Ɋ�Â��ω��������\�Ȏ蕔�@�\�̊J�� |
||
|
�@�{�����v���W�F�N�g�ł́C�l�Ԃ̃_�C�i�~�b�N�ȉ^���Ƃ��ē�������ɒ��ڂ��C�l�Ԃ̓��������{�b�g�Ɏ�����邱�ƂŁC
�������ȓ����q���[�}�m�C�h���{�b�g���쐬���邱�Ƃ�ڕW�Ƃ��Ă��܂��D����܂łɌ��̈ړ����Č�����������u�C�l�Ԃ̓�������
�e����͋[�������E���b���@�\�C�����ɂ��E�͓�����s���I���@�\�C�e���́E�����͂��ł���O�r�E���@�\�C�X�g���[�g�������ł���y�ʂȎ蕔�@�\���J�����Ă��܂����D�������C�蕔�@�\�� 58[%]���ʒ��߂� �Ă��邱�Ƃ�C�X�g���[�g�ȊO�̓������ł��Ȃ��Ƃ����ۑ肪����܂����D�����ŁC�{�����ł͕ω����i�t�H�[�N�{�[���j�̓������\�Ȍy�ʎ蕔�@�\�̊J����ڎw���܂����D
�@�t�H�[�N�{�[���́C��]�����X�g���[�g�Ɣ�ׂĂ��悻�����ł���C�o�b�^�[�̎�O�ŋ}���ɗ�����悤�ȋO����`������ł��D�t�H�[�N�{�[���̓����Ƃ��Ď��w�E���w�Ń{�[��������œ������邱�Ƃ��������܂��D���̓������玦�w�E���w�̓��O�]���삪�K�v�ł��邽�߁C�t�H�[�N�{�[���̃{�[�������[�X���ɂ�����{�[���̉�]�t�^���f�����l�Ă��C���O�]�̈���͂Ɠ��O�]�̊p�x���Z�o���܂����D �@�@�\�v�ɂ��āC���w�E���w�͓��O�]����� PIP �߂̋��ȁE�L�W����ɕ������܂��D���ɓ��O�]����͎Z�o�����v���d�l�Ɋ�Â��C�M�A�@�\�ɂ��C 1 �̃��[�^���� 2 �̎w�֓��͂�`�B���ē��삵�܂��DPIP �߂̋��ȁE�L�W����͌��s�̃��C���Œ�E�����@�\�̌Œ���@���q���W�̊J�ɂ����̂��烉�`�F�b�g�ɂ�� �������ɕύX���܂����D��w�̓t�H�[�N�{�[���̓������͊�^�����������Ƃ���C���̓�����Œ肷�邱�ƂŁC�啝�Ȍy�ʉ��ɂȂ���܂����D �@�����ł́C���s�̎蕔�@�\�Ƃ̓������ʂ��r���܂����D���̌��ʁC���s�̎蕔�@�\�ɂ��X�g���[�g�́C���ϋ��� 36[km/h]�C���ω�]�� 425[rpm]�C�J�������蕔�@�\�� ���t�H�[�N�{�[���͕��ϋ��� 33[km/h]�C���ω�]�� 209[rpm]�ƂȂ�C�t�H�[�N�{�[���̉�]�����X�g���[�g�ɑ��Ĕ������Ă��邱�Ƃ��m�F�ł��܂����D�܂��C�J�������@�\�͌��s�̋@�̂��� �� 21%�y�ʉ����邱�Ƃ��ł��܂����D |
||

Fig. 10 ���O�]����̃M�A�@�\ |
||

Fig. 11 �蕔�@�\�̑S�̐} |
||

Fig. 12 ����@�̂���ю��R�x�z�u�} |
|
[�֘A�_��] �E ���[�������C"�l�Ԃ̓����ɒ��ڂ��������q���[�}�m�C�h���{�b�g�̊J���i�� 9 ��F�t�H�[�N�{�[���������̎w���f���Ɋ�Â��ω��������\�Ȏ蕔�@�\�j�C�� 43 ����{���{�b�g�w��w�p�u����\�e�W�C1D5-05�C�����s�C2025 �N 9 ���D |
�� �e���̗͂��p�ɂ�鍂�����ȓ������\�ȑ̊��@�\�̊J�� |
||
|
�@�{�����v���W�F�N�g�ł́C�l�Ԃ̉^���Z�p�̍H�w�I�ȉ𖾂�ړI�Ƃ��āC�l�Ԃ̉^�����̓�����������邱�Ƃɂ��C�A�N�`���G�[�^�̏o�͂ɑ��āC�����p�t�H�[�}���X����������q���[�}�m�C�h���{�b�g�̊J�����s���Ă��܂��D����܂ł̌����ł́C�蕔�E�r���E��������ё̊�������\������郍�{�b�g�J�����܂����D���{�b�g�ɂ͐l�Ԃ̌��߂⌨�b���ɂ�����e����������邱�ƂŁC�l�Ԃ̓�������ɂ�����r�̉^�����Č����C��30[km/h]�̓������x�ɂ����Č����I�ȓ�����������܂����D�������Ȃ���A100[km/h]����悤�ȓ�������̍Č��ɂ͎����Ă��܂���D���̗v���Ƃ��āC����܂ł̑̊��������ʒu�ړ��̍Č���ړI�Ƃ��Đv����Ă��邱�Ƃ��������܂��D���̑̊��@�\�͎��ʂ��v����啝�ɒ��߂��Ă���C�������̐l�Ԃ̏o�͂��ł��Ȃ��Ƃ�����肪����܂����D�����Ŗ{�����ł́C�e���@�\�ɂ�荂�����ȓ������\�Ől�ԂƓ����̎��ʂƃ����N����L����q���[�}�m�C�h���{�b�g�̑̊��@�\�̊J����ڎw���܂����D
�@�{�����ɂ����āu�̊��v�Ƃ́C�l�Ԃ̑S�g���瓪���E�r���E�r�������������̑S�̂��w���C�]���̉��[�ŏ㓷����щ�����2�ɕ����č\������܂��iFig. 13�j�D�l�Ԃ̓�������ɂ����āC����ɉ����ĉ����̉�]�G�l���M�[��r���ւƓ`�B���������S�������łȂ��C�̊������蕔��r���ɔ�ׂđ傫�ȃG�l���M�[�������Ă��܂��D���ɁC�̊��P�]�^���ɂ��e���͂��g�p���C��]�������Ă��܂��D�������̑̊��̓���̓�����Fig. 13�Ɏ����܂��DFig. 13��⓪�̓����n�߂̏�Ԃ���@�ɂ����āC�܂��������㓷�ɑ��Đ�s���ĉ�]���C�㓷�Ƙr�������͂ɂ���Ď��c����܂��D���̍ۂɉ����Ə㓷���P���C�̊�Yaw���ɒe���G�l���M�[���~�ς���܂��D���ɁC�A�ł͏㓷���e���G�l���M�[���J�����Ȃ��牺���Ɠ������������ɉ�]���邱�ƂŁC�����ɉ�]���܂��D�����Ă��̐����𗘗p���ćB�̂悤�Ƀ{�[���������[�X���܂��D���̂悤�ɁC�e���G�l���M�[�𗘗p���邱�ƂŐl�Ԃ͍����ȓ������������Ă��܂��D �@�l�Ԃ̓������ɂ�����̊��̒e�����͋���131[km/h] �̎��ɁC��714[Nm/rad]�ł���C�l�Ԃ̏㓷���̎��ʂ�16[kg]�ł��邱�Ƃ���C������v���Ƃ��đ̊��@�\��v���܂����D�J�������̊��@�\��CAD�}�ƊO�ς�Fig. 14�Ɏ����܂��D�܂��C�������{�b�g�S�̂̎��R�x�z�u�}��CAD�}��Fig. 15�Ɏ����܂��D�e���@�\�͍����ɓ��ڂ���C�̊��P�]�^�����Č����܂��D�܂��C�v���ꂽ�㓷���̎��ʂ͖�43%�̌y�ʉ����������C15.9[kg]�ƁC�v�������܂����D �@�J�������@�\�̗L�p����]�����邽�߁C�q���[�}�m�C�h���{�b�g�ɂ��d�����̓������������{���܂����D�]�������ł́C�e���@�\�̂˂𗘗p���邱�ƂŁC�˔�g�p���Ɣ�r���đ̊���Yaw���ɂ��������G�l���M�[��14%�ጸ����܂����D����ɂ��C�̊��P�]�^����͋[�����e���@�\�̗L�������m�F����܂����D����ɁC�e���@�\�̓�������э\���̌y�ʉ��ɂ��C��40[km/h]�̃X�g���[�g�����ɐ������܂����D���̌��ʂ���C�̊��P�]�^����͋[����e���@�\������邱�Ƃɂ��C�̊��@�\�̌��������コ���邱�Ƃ��ł��邱�Ƃ��m�F�ł��܂����D |
||

Fig. 13 �������̑̊��P�]�^�� |
||

Fig. 14 �̊��@�\ |
||
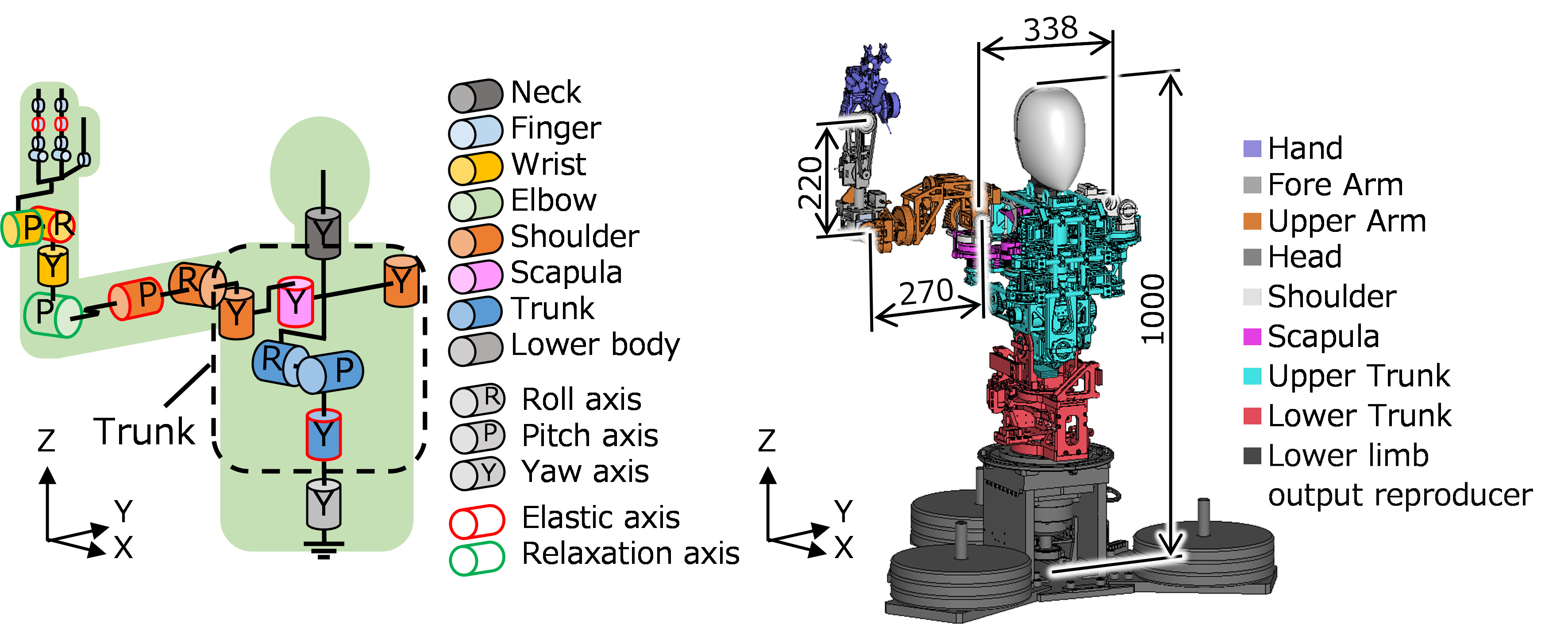
Fig. 15 �������{�b�g���R�x�z�u�}�E�������{�b�g�S�̐} |
|
[�֘A�_��] �E ���c��N���C�h �l�Ԃ̓����ɒ��ڂ��������q���[�}�m�C�h���{�b�g�̊J���i��8��F�e���̗͂��p�ɂ�鍂�����ȓ������\�ȃq���[�}�m�C�h�̊��@�\�̊J���j�h�C��43����{���{�b�g�w��w�p�u����\�e�W�CRSJ2025AC1D5-04�C�����s�C2025�N9���D |
�� �e���́E�����͂𗘗p����O�r�E���@�\�̊J�� |
||
|
�@�������{�b�g�̃v���W�F�N�g�ł́C�l�Ԃ̃_�C�i�~�b�N�ȉ^���̂����C
��������ɒ��ڂ��Đl�Ԃ̐g�̍\����@�\�ɒ��ڂ��������q���[�}�m�C�h���{�b�g���쐬���邱�Ƃ��ŏI�ڕW�Ƃ��Ă��܂��D
����܂łɐl�Ԃ̓������̒e�����Č�������������ь��b�����C�E�͂��Č������y�ʂȕI���C
�l�ԓ����ȏo�͂������\�ȑO�r���C��쓮�ɂ��w���@�\�C
����ё̊��̓�����Č������̊����u���J�����Ă��܂����D
�@���̌����ł́C�l�ԂƓ����x�̎��ʓ����������C �l�ԂƓ����̏o�͔�������ђe���́E�����͂𗘗p���邱�Ƃ��\�ȑO�r�E���@�\�̊J����ڎw���܂����D ����͈ȑO�J�������O�r�E����l�Ԃ̓�������̓����ł���e���̗͂��p��E�͂��s���Ȃ����ƁC �����Ď��ʂ����l�̑O�r���̕��ώ��ʂɑ��ďd���C ���Ȃǂւ̕��S���傫���Ȃ荂���ȓ������ł��Ȃ����Ƃ��ۑ肾�������߂ł��D �@���̓���������/�w���C����/�ڋ��C���/��O��3���Ƃ����Ƃ��̓�������̃f�[�^����C ����/�w���^���͓������O�ŒE�͂��C����/�ڋ��^���͒e���͂𗘗p���Ă��邱�Ƃ�������܂����D �@�\�Ƃ��ẮC����/�w���^���͓d���𗘗p�����Œ�E�E�͓���C����/�ڋ��^���͂˂����[�^�ƕ���ɔz�u���C �������x�̌��エ��уG�l���M�[�̍���������}��܂����D�܂���^�ȑO�r�̃t���[�����C �@�B�v�f���O���ɓ��ڂ������i�����邱�ƂŖ�65%�̏d�ʍ팸�ɂȂ���܂����D �@�����ł́C�E�͂�p������������ɂ�蓊�����x����11%���サ�C �˂�p������������ɂ��Y�����̃��[�^����d�͂���9%�ጸ����܂����D |
||

Fig. 16 ���/�w�����E�͋@�\ |
||

Fig. 17 ����@�̂���ю��R�x�\���} |
|
[�֘A�_��] �E �O��������C"�l�Ԃ̓����ɒ��ڂ��������q���[�}�m�C�h���{�b�g�̊J���i��7��F�e���́E�����͗��p��͋[���铊�����{�b�g�̑O�r�E��@�\�j�C��42����{���{�b�g�w��w�p�u����\�e�W�C2A1-02�C���{�C2024�N9���D |
�� �X�g���[�g�������̎w���f���Ɋ�Â����������\�Ȍy�ʎ蕔����@�\�̊J�� |
||
|
�@�{�����v���W�F�N�g�ł́C�S�g������������_�C�i�~�b�N�ȓ���ł��铊������ɒ��ڂ��C
�l�Ԃ̓�����������邱�Ƃɂ��C�y�ʁE�������ȓ����q���[�}�m�C�h���{�b�g�̊J����ڕW�Ƃ��Ă��܂��D
����܂łɌ��ʒu�̈ړ����Č�����������u�C�e������������E���b���@�\�C�E�͂��\�ȕI���@�\�C
�l�ԂƓ����̏o�͔������\�ȑO�r�E�蕔�@�\���J�����Ă��܂����D
�������C�O�r�E�蕔�@�\�͏o�͗v�������v�̌��ʁC�v�����ʂ�啝�ɒ��߂��Ă���C
���������̎����̖W���ƂȂ��Ă��܂����D�����Ŗ{�����ł́C�y�ʂō����������\�Ȏ蕔����@�\�̊J����ڎw���܂����D
�@�l�Ԃ̓������C�{�[�������[�X�̑O�ɁC�w�Ŕc�����ꂽ�{�[�������w������C �{�[���͎��w�E���w�̎w������ɓ]����n�߃X�s����������܂��D �܂�C�l�Ԃ̓������̎�̖����͔c���ƃX�s���t�^�̑傫����ɕ����邱�Ƃ��ł��C ���̐�ւ��͕�w�̊J���ɂ���Đ����܂��D �܂��C�l�Ԃ̃X�g���[�g�������̒��w�̓����Ƃ��āC�����[�X���ɁC �h�R�ؓ��m�����k�����鋤���k�ɂ��PIP�߂Ȃǂ̍��������߂Ă��邱�Ƃ���������Ă��܂��D ����ɁC�X�g���[�g�������̎��w�ƒ��w�̃����[�X�^�C�~���O�͂قړ����ŁC PIP�߂͓��l�̊p�x�ω����������Ƃ��m�F����Ă��܂��D �@�����ŁC�ł���ʓI�ȋ���ł���X�g���[�g��ΏۂƂ��Ď��w�E���w�@�\����ѕ�w�@�\��v���C ���Ɏ��w�E���w��PIP�߂̓����ɒ��ڂ��ă��[�^���X�Ƃ��邱�ƂŁC�y�ʉ���}��܂����D ���w�E���w�ɂ��āC�c�����́C���C���Ɠd����p�������w�E���wPIP�ߊp�x�Œ�E�����@�\�ɂ��C ��[�𒆐ߍ������N�ɌŒ肵�����C���̂�����[���q���W�ŋ��ݓd�����z�����ʒu���Œ肷�邱�ƂŁC PIP�߂��L�W���Ȃ��悤�ɂ��܂��D �c������X�s���t�^��ւ��ۂɓd�����ߕ����邱�ƂŃ��C�����͂ɂ��q���W���J���Œ肪��������܂��D �X�s���t�^���́C���w�E���wPIP�ߒe���@�\�ɂ��CPIP�߂ɒe�����t�^����܂��D �����l�����߂邽�߂�PIP�߂ɒe����t�^�����ۂ̃X�g���[�g�������̃X�s���t�^���̎w���f�����쐬���܂����D ����107[km/h]�̐l�Ԃ̓������̃f�[�^���Q�l�ɁC �{�[�������[�X����PIP�߂̊p�x��170�`180[deg]�ƂȂ鍄���l�������Ƃ���C ���w�E���w���ꂼ���PIP�߂̍����l�̗v����3[Nm/rad]�ƂȂ�܂����D ��w�@�\�ɂ̓g�[�V�����˂�������C�A���I�Ȕc���g���N�����邱�ƂŃ��[�^�̗v����ጸ���C �y�ʉ���}��܂����D�����̉��ǂɂ��C �蕔����@�\�̎�ȋ@�B�v�f�̍��v���ʂ�1130[g]����300[g]�ւƑ啝�Ȍy�ʉ���B�����܂����D �@�@�\�̗L�p����]�����邽�߂ɓ����q���[�}�m�C�h���{�b�g�ōd�����̓����������s���܂����D ���{�b�g�̓��쑬�x�ɍ��킹�Ď��w�E���w��PIP�߂̍����l�͂��ꂼ�� 0.8[Nm/rad]�Ƃ��܂����D �����ł́C�l�Ԃ̓�����͋[�������{�b�g�ɂ��d�����̓����̌����ł͍ō������ł���ƍl������C ��35[km/h]�C�� 450[rpm]�ŃX�g���[�g�̓����ɐ������C�l�Ԃ̓������̎�̖����Ɠ������Č�����Ă��邱�Ƃ��m�F�ł��܂����D ���{�b�g�̒��w��PIP�߂̊p�x�̎��ԕω��̃����[�X�ɂ����Ă̌X���͐l�Ԃ̓������̃f�[�^�Ɨގ����Ă���C PIP�߂ɒe����t�^���郂�f���̑Ó������x�����錋�ʂƂȂ�܂����D �܂��C��w�̏����O�]�̃^�C�~���O��ω������邱�Ƃœ���������ω��������邱�Ƃ��m�F�ł��܂����D |
||

Fig. 18 �p�x�Œ�E�����@�\����} |
||

Fig. 19 �e���@�\����} |
||

Fig. 20 �J�������蕔�@�\ |
||

Fig. 21 ����@�̂���ю��R�x�\���} |
||
|
[�֘A�_��] �E �ؗ����C"�l�Ԃ̓����ɒ��ڂ��������q���[�}�m�C�h���{�b�g�̊J���i��6��F�X�g���[�g�������̎w���f���Ɋ�Â����������\�Ȍy�ʎ蕔�@�\�̊J���j�C��42����{���{�b�g�w��w�p�u����\�e�W�C2A1-01�C���{�C2024�N9���D |
�� �e������������E���b���ߋ@�\�̊J�� |
||
|
�@�������{�b�g�̌����ł́C�l�Ԃ̃_�C�i�~�b�N�ȉ^���̂����C
��������ɒ��ڂ��Đl�Ԃ̐g�̍\����@�\�ɒ��ڂ��������q���[�}�m�C�h���{�b�g���쐬���邱�Ƃ��ŏI�ڕW�Ƃ��Ă��܂��D
����܂łɐl�Ԃ̓������̒e�����Č����������C�E�͂��Č������y�ʂȕI���C�l�ԓ����ȏo�͂������\�ȑO�r���C
��쓮�ɂ��w���@�\�C����ё̊��̓�����Č������̊����u���J�����Ă��܂����D
�@���̌����ł͐l�Ԃ̓������C���b���̏_�炩�������ۂ̓����ɂ����ďd�v�ł���Ƃ����X�|�[�c�Ȋw�̒m���ɒ��ڂ��C ���b�����猨�̈ړ����N�������b�ѓ�����Č�����@�\�̊J����ڎw���܂����D �������̐U�肩�Ԃ���ɂ͑̊��̉�]�ɂ���Č�������ɉ�����C ���b�����ӂ̋ؓ��ɒe���G�l���M�[��~�ς����������猨��O���֑���o���܂��D ���̓��������{�b�g�Ɏ�����邽�߂Ɍ��b���߂Ƃ��Ēe���������ꂽ���b���ߋ@�\��V���ɍ쐬���C �����\�͂̌����ڎw���܂����D �@�������C���b���͓��]/�O�]�C������/��������C����/�����̓��삪���݂��C����炪����/�L�W����C ����/��������̌��b�ѓ���ƁC���߂̓��O�]�ɘA������������s���܂��D �����̗v�f�����G�ɓ���Ɋւ���Ă��܂��D�����Ń��{�b�g�̓����\�͂̌���ɏœ_���i��C �������̌��b�����ӂɂ����Ċ�^�̑傫���ł���O�������b���̐�������Ɋւ�铮��ł��邱�Ƃ���C �܂�yaw�������̋쓮�����������܂����D ���b�������G�l���M�[�𗭂߂�˂����Ƃ��Ď������邱�ƂŃA�N�`���G�[�^�ւ̃g���N���y�������ۂ̃��{�b�g�̐��\�̌����}��܂����D �@�����ł͑̊��̉�]�̑���Ɍ��b�������̂���]�������������s���C �e���𗭂߂���̌��̑O���ւ̑���o���ɂ�����o�͂��˔ڎ��ɑ���48���ጸ����邱�Ƃ��m�F����܂����D |
||

Fig. 22 �J���������b���@�\ |
||

Fig. 23 ����@�̂���ю��R�x�\���} |
|
[�֘A�_��] �E ��{�^�P���C"�l�Ԃ̓����ɒ��ڂ��������q���[�}�m�C�h���{�b�g�̊J���i��5��F�e����������������{�b�g�̌��E���b���@�\�̊J���j�C��41����{���{�b�g�w��w�p�u����\�e�W�C3I2-01�C�{�錧�C2023�N9���D |
�� �������̒E�͓����͋[����y�ʕI���@�\�̊J�� |
||
|
�@���̌����ł́C�_�C�i�~�b�N�Ȑl�Ԃ̉^���Ƃ��ē�������ɒ��ڂ��C
�l�Ԃ̓��������͋[����q���[�}�m�C�h���{�b�g�̊J����ڕW�Ƃ��Ă��܂��D
����܂łɐl�Ԃ̂悤�Ȓe����L���錨������є\���E�E�͂̐ؑւ��\�ȕI���C��쓮�w���������蕔����Ȃ�E�r������ѓ������ɑ̊��Ȃǂ̉^���ɂ��N���錨�̈ړ����Č�����������u���J������܂����D
�{�����ł́C�l�ԂƓ����x�Ɍy�ʂŔ\���E�E�͂̐ؑւ��\�ȕI���@�\�̊J����ڎw���܂����D
�@�]���̋@�\�ł́C�l�Ԃɂ�����ؓ��ɂ����ȐL�W�����[�^�̔\���쓮�ɂ��͋[���C�{�[�������[�X�t�߂̍��p���x�ł̕I�̐L�W���ɂ́C���g���N��`�B�\�ȃc�[�X�N���b�`��p���ă��[�^����̓��͂��Ւf���C�����͂ɂ���đO�r��������]�����܂��D ���̋@�\�̖��_�́C�r���̗v������2.5[kg]�ɑ��c�[�X�N���b�`��400[g]�Ƙr���̋@�B�v�f�̒��ōł��d�����Ƃł��D ���̂��߁C�I�̗v���d�l�͐l�Ԃ̓���v���f�[�^����C�E�͓��쎞�̕I�߃g���N��10[Nm]�C ���[�^�ɂ��\�����삩��E�͓���ւ̐ؑւ��\�ł��邱�ƁC �E�͏�ԂŕI��L�W�����ɍ�����]�\�ł��邱�ƁC �����ē�������̒��ŕI�̐L�W���s���鎞�Ԃ͂��悻41[ms]�ł��邱�Ƃ���C�ؑ֎��Ԃ����������邱�ƂƂ��C�V���Ȍy�ʕI���@�\���J�����܂����D �\������ƒE�͓���̐ؑւ���������y�ʂȋ@�\�Ƃ��āC�@�B�I�Ȑڑ����������������Ƃ��܂����D �I������L�т��r�[����O�r�t���[���ƃ\���m�C�h�̐�[�ɂ����x�A�����O�ŋ��ނ��ƂŌŒ肵�C���[�^����I���ցC�I������O�r�t���[���ւƃ��[�^����̓��͂̓`�B���\�ɂ��Ă��܂��D �Œ�̌����Ɛ����ȕ����ɋ쓮����\���m�C�h�őO�r�ƃr�[���̌Œ���������邱�Ƃɂ���ă��[�^����̓��͓`�B���Ւf���C�E�͓���ւ̐ؑւ��\�ɂ��܂����D ����ɂ�蓮�͓`�B���ɂ����锽�͂̕��͂͒����@�\�̋쓮�����ɔ��������A�N�`���G�[�^�̏o�͗v���������邱�Ƃ��\�ɂȂ�܂����D �܂����͂̓\���m�C�h�̋쓮�������x����K�C�h���[���Ŏ����Ƃő�g���N�`�B���\�ɂȂ�܂����D �����āC�\���m�C�h�̃X�g���[�N�̒������E�͓��쎞�̌��Ԓ����ɉe�����C���̒����͖�1.5[mm]�ƂȂ�܂����D �@�����̉��ǂɂ��C�]���̐ؑւɗp�����c�[�X�N���b�`�ƁC�{�����̃\���m�C�h�ɂ��ؑ@�\�̏d�����ׂ��400[g]����206[g]�ւƑ啝�Ȍy�ʉ����������܂����D |
||

Fig. 24 �J�������I�@�\ |
||

Fig. 25 ����@�̂���ю��R�x�\���} |
|
[�֘A�_��] �E ���V�R�����C"�l�Ԃ̓����ɒ��ڂ��������q���[�}�m�C�h���{�b�g�̊J���i��3��F�������̒E�͓����͋[����y�ʕI���@�\����у{�[���ɉ�]�������铊�����\�Ȏw���@�\�̊J���j�C��40����{���{�b�g�w��w�p�u����\�e�W�C1E1-03�C�����s�C2022�N9���D |
�� �l�ԂƓ����̏o�͔������\�ȑO�r������ю蕔�@�\�̊J�� |
||
|
�@���̌����ł́C�_�C�i�~�b�N�Ȑl�Ԃ̉^���Ƃ��ē�������ɒ��ڂ��C
�l�Ԃ̓��������͋[����q���[�}�m�C�h���{�b�g�̊J����ڕW�Ƃ��Ă��܂��D
���Ɍ��߂���ѕI�߂�����r������ь��ʒu�̈ړ����Č�����������u���J������Ă��邽�߁C
���߂���юw�߂����O�r���y�ю蕔�@�\�̊J����ڎw���܂����D
�@��s��������l�Ԃ̓�������ł́C���̂悤�ȓ����������Ƃ��������Ă��܂��D �܂��̊���r�̉^���ɂ��蕔�̓{�[����c�����Ȃ���C�����ړ����܂��D ����ɑO�r�Ǝ��̉�]�^���͎蕔����]�C���������C�Ō�Ƀ{�[�����w�ʼn����o���C�����̉�]�C�����C���x�����肵�܂��D �@�����̐l�Ԃ̓�������ɂ�����������������C�l�ԂƓ����̏d�ʁC�T�C�Y�C��U�w�Ɋ�Â����p���������C ����ɋ���100[km/h]�̓���������Q�l�ɁC�o�͗v�����g���N�͎��Roll, Pitch, Yaw���Ŋe�X9.0[Nm]�C3.0[Nm]�C5.0[Nm]�C�p���x��3���Ƃ�2400[deg/s]�Ƃ��āC �����̊p���x�ƃg���N���ɔ����ł��邱�Ƃ�v���Ƃ��܂����D �܂��w�߂ւ̏o�͗v���́C�w��ł̍ő唭����150[N]����ъp���x3500[deg/s]�Ƃ��܂����D �����̗v���d�l�������߂ɁC���̂悤�ȋ@�\���l�Ă��܂����D �܂������@�ɂ͎��E�w�Ƃ��ɗv������o�͂��ł���悤�E�H�[���M�����̗p���܂����D �܂��y�ʉ�����ѐl�Ԃ̎w�̋쓮�@��͋[���邽�߁C�w���쓮���郂�[�^�͓����ɕK�v�Ȏ��w�C���w�C��w�Ɋe1�Ƃ��C �e�w�ɂ��ď����ɔz�u�������C���őS�߂�A�����ċ��Ȃ����C�L�W�ɂ̓o�l��p����Нh�R�쓮�����@�\���̗p���܂����D ����ɏ��^���C���ʂ̕��U�̂��߂Ɏ��Yaw�����[�^���w�̃��[�^����уE�H�[���M����̊����ɔz�u���C���͓`�B�Ƀt���L�V�u���V���t�g����� ���C���ƃA�E�^�[�`���[�u��p����@�\���̗p���܂����D �@�ȏ�܂��O�r���y�ю蕔�̋@�\��v���܂����D�@�\�̗L�p����]������ׂɃ{�[���̔c���������s���܂����D �������烏�C������уo�l��p�����Нh�R�쓮���L���ł��邱�ƁC�v�����@�\�ɂ��{�[���c�����@�\���Ă��邱�Ƃ��m�F�ł��܂����D |
||

Fig. 26 �Нh�R�쓮�ɂ����ȁE�L�W����w�߂̋@�\ |
||

Fig. 27 ���߂̋@�\ |
||

Fig. 28 ���삵���@�̂���ю��R�x�\���} |
|
[�֘A�_��] �E �{�V�[�ᑼ�C"�l�Ԃ̓����ɒ��ڂ��������q���[�}�m�C�h���{�b�g�̊J���i��2��F�l�ԂƓ����̏o�͔������\�ȑO�r������ю蕔�@�\�̊J���j�C��39����{���{�b�g�w��w�p�u����\�e�W�C3C1-04�C�I�����C���J�ÁC2021�N9���D |
�� �e���͂Ɗ����͂𗘗p�����������\�ȓ����r���@�\�̊J�� |
||
|
�@����܂Ŗ{�����ɂ����ẮC�l�Ԃ̃_�C�i�~�b�N�ȉ^����͋[����q���[�}�m�C�h���{�b�g�Ƃ��đ��s�^���ɒ��ڂ��ĊJ�����s���Ă��܂����D
���̌����ł́C���s�ȊO�̃_�C�i�~�b�N�Ȑl�Ԃ̉^���Ƃ��ē�������ɒ��ڂ��C
�l�Ԃ̓��������͋[����q���[�}�m�C�h���{�b�g�̊J����ڕW�Ƃ��Ă��܂��D
�@��s�����ɂ��C�l�Ԃ̓������̌���I�̓���Ɋւ���g�̓I�����ɂ��āC���̂��Ƃ��������Ă��܂��D �P�D�ؓ����F�����e���𗘗p���邱�ƂŁC�������̌��̓��O������ɂ����Ēe���G�l���M�[�̒~�ςƉ���𓊋����쒆�ɍs���Ă���D �Q�D�������ɑO�r�ɂ����銵���𗘗p���邱�ƂŁC�I�߂�L�W������ؓ��ɗ��炸�ɕI��L�W�����đO�r�����������Ă���D �@��L��2�_�̐l�Ԃ̓������@�\�Ƃ��Ď����ꂽ�q���[�}�m�C�h���{�b�g�̘r�����J�����邽�߂ɐl�Ԃ̓��������l�̌v��������s���������܂����D �����f�[�^����͂������ʁC�l�Ԃ̌��̊O���p�����̊p�x����ƃg���N�Ɗp�x�����`�̊W�������Ƃ�������܂����D ���̌X������C���߂̒e���l�̗v���d�l��70[Nm/rad]�ƒ�߂܂����D �܂��C�{�[�������[�X���O�̕I�L�W���ɂ����āC�p���x�ω��̑傫���ɑ��Ĕ����g���N�����������Ƃ�������܂����D ���̎��_�̃g���N����C�I�߂̔����g���N�̗v���d�l��10[Nm]�ȉ��ƒ�߂܂����D �����̗v���d�l�������߂ɁC���̂悤�ȋ@�\���l�Ă��܂����D ���̓��O���̓�����s���@�\�ɂ́C���[�^�쓮�ɂ��\������ƃo�l�𗘗p�����e��������ߊp�x�ɉ����Đ�ւ��邽�߂ɁCCFRP���̔˂𗘗p�����@�\���l�Ă��܂����D �����͂𗘗p����I�̋@�\�Ɋւ��ẮC���[�^����̓��͓`�B��C�ӂɎՒf���邽�߂ɃN���b�`���g�p�����@�\���l�Ă��܂����D �@�ȏ�̂��Ƃ��l�����Ęr���̋@�\��v���܂����D�܂��C�J�������r��]�����邽�߂ɂ͘r�Ɋ����͂�������K�v������C �������̑̊����̓������Č����邽�߂̎������u���v���܂����D�@�\�̗L�p����]������ׂɓ��͊w�V�~�����[�^��Ō����s�����Ƃ���C �e���͂⊵���͂𗘗p�����@�\�𓋍ڂ��邱�ƂŁC�A�N�`���G�[�^�ւ̕��ׂ��y�����ꂽ���Ƃ��m�F�ł��܂����D |
||

Fig. 29 �����O��������s���@�\ |
||

Fig. 30 �I�߂̋@�\ |
||

Fig. 31 �v�����@�́i�������u�܂ށj |
|
[�֘A�_��] �E �n�����瑼�C"�l�Ԃ̓����ɒ��ڂ��������q���[�}�m�C�h���{�b�g�̊J���i��1��F�e���͂Ɗ����͂𗘗p�����������\�ȓ����r���@�\�̊J���j�C��38����{���{�b�g�w��w�p�u����\�e�W�C2H3-04�C�I�����C���J�ÁC2020�N10���D |
���s���{�b�g |
||
�� �߂ɍ����ϋ@�\������2�����s���{�b�g�̂��ߍ����ȉ~�v�Z�ɂ��r��������V�X�e���̊J�� |
||
|
�@����܂ł̌����ŁC�l�Ԃ̒���E���s�^����͋[���邽�߁C�l�Ԃ̗͊w�I�������Č��������s���{�b�g�̊J�����s���Ă��܂����D�l�Ԃ̑��s�^���ł́C�r�S�̂������ˁC�e�߂���]�˂̂悤�ɐU�镑���C�����̍����͑��s���x�ɉ����ĕω����邱�Ƃ��������Ă��܂��D����܂ł̌����ŊJ������Ă������{�b�g�͂��̓�����͋[���C�G�߂���ё��߂ɍ����ϋ@�\�𓋍ڂ��Ă���C�ߍ�����ύX���邱�Ƃ��\�ł��D�������Ȃ���C�r�S�̂̍����Ɗe�߂̍����̊W���ɂ��Ă͖��m���ł����D
�@�����Ŗ{�����ł́C�^������ɓK�����C�ӂ̋r�������������邽�߂́C�����ϋ@�\�Ɗߊp�x�̐�����s���V�X�e���̊J�����s���܂����D�߂ɂː����������N�@�\�̐�[�������Z�o������@�Ƃ��č����ȉ~��p���܂����D�ߊp�x����ъߍ�������ڒn�_�i���䋅�j�ł̍�������ʏ�ŎZ�o���CFig. 32�̂悤�ɐ}������v���O�������쐬���܂����D���̌`�����ɋr�����̐�����s���C�r���������𑖍s���x�ɉ������l�ɋ߂Â���ƂƂ��ɁC���萫����̂��ߐ��������̍��������߂邱�Ƃ�ڕW�Ƃ��܂����D �@�r���������̖ڕW�l�͑��s�s�b�`�ɉ����Ē�߂܂��D�Ҋ߁E�G�߁E���߂̊p�x����ѕG�߁E���߂ɓ��ڂ��������ϋ@�\�ɂ��ߍ�����5�̕ϐ����r�����ɉe����^���܂��D�ڕW�Ƃ��鑖�s�s�b�`�ɓK����5�̕ϐ��̑g�ݍ��킹�����߂���@�Ƃ��āC�œK���v�Z���s���܂����D��������Ƃ��ċr���������C���n�ʒu�C�����ȉ~�̌�����ݒ肵�C���������������ő剻���܂��D �@ �܂��C�r������������@�ɂČ����邽�߁C�n�[�h�E�F�A�ɂ���Fig. 33�̂悤�ɑ����@�\�̐v�ύX���s���܂����D�]���̋@�̂ł͐l�̐��@���璴�߂��Ă��������̐��@���C�l�̐��@�Ɠ�����90[mm]�܂ŏk�����܂����D�܂��C�ڒn�p�g��̂��߂̑���@�\�̒Z�k���s���C�ڒn�\�Ȋp�x���]����30������60���܂Ŋg�債�܂����D����ɁC�Z���T���ڂ̂��߂̐v���s���C�e��Pitch���ɂ̓��[�^���G���R�[�_���C���������ϋ@�\�ɂ̓��j�A�G���R�[�_���C���ꕔ�̐ڒn�_�ɂ͗͊o�Z���T�𓋍ڂ��܂����D���������ƂɎ������s���C���@�ɂ����č����ȉ~�̕ω��ɔ����ċr�������ω����邱�Ƃ��m�F���܂����D |
||

Fig. 32 �����ȉ~�̊T�v�Ǝ��ۂ̎Z�o���� |
||

Fig. 33 �����@�\�ƃZ���T���ڕ��̏ڍ� |
||
|
[�֘A�_��] �E ����F�ґ��C"�߂ɍ����ϋ@�\������2�����s���{�b�g�̂��߂̍����ȉ~�v�Z�ɂ��r��������̌���"�C��43����{���{�b�g�w��w�p�u����\�e�W�C�y3E3-04�z�C�����s�C2025�N9���D |
�� ���r���Ɋߒe����ύX�\�ȓ��s���{�b�g�����̊J�� |
||
|
�@�l�Ԃ̑��s����ł́A�r���˂̂悤�ɐU�镑���A���s���x�̕ω��ɉ����Ċ߂̍������ω����邱�Ƃ��m���Ă��܂��B���ɑ��߂́A���s���̐��i�͂�Ռ��z���ɂ����ďd�v�Ȗ�����S���Ă���A���̒e��������͕킷�邱�Ƃ́A���l�Ԃɋ߂������I�ȑ��s���{�b�g�̎����ɕs���ł��B
�@����܂ł̌����ł́ACFRP�˂�p���������ɂ���āA�����ς���������@�\���쐻����Ă��܂����B�������A�]���̋@�\�ł́A���r���ɉd���Ȃ��烊�A���^�C���ō�����ύX���邱�Ƃ�����ł���A���s���ɖڕW�����l���ێ��ł��Ȃ��Ƃ����ۑ肪����܂����B �@�{�����ł́A���s���̑��߃g���N�Ɗp�x���v�����A�˂̗L�����𐧌䂷�邱�ƂŁA���r���ɂ�������ύX�\�ȑ����@�\���J�����܂����B�J�������@�\�́A�˂�p��������e���@�\����b�Ƃ��A�L�����̕ύX�ɂ���Ċ߂̒e�������𐧌䂵�܂��B����ɁA�˂̕ψʂ��v�����Ȃ��烊�A���^�C���ɗL���������邱�ƂŁA�C�ӂ̐��`�ߍ��������邱�Ƃ��\�Ƃ��܂����B �@���o�͉��Ɍ����āA�{�[���˂��쓮�n�����ǂ��A2298[N]�̉d���ł�0.4�b�ȓ��ɔ˂̉d�_��30-70[mm]�ړ��\�ȏo�͂��������܂����B�܂��A�d�����@�ɂ��ڍׂȕ]����ʂ��āA�@�\�̔���`���̉e�����ʓI�ɉ�͂������܂����B |
||

Fig. 34 ���o�͑����@�\ |
|
[�֘A�_��] �E ���V�H���C"���r���Ɋߒe����ύX�\�ȓ��s���{�b�g�����̊J���C��43����{���{�b�g�w��w�p�u����\�e�W�CAC3E3-05�C�����s�C2025�N9���D |
�� �r�e�������p�����Q�����s���{�b�g�̂��߂̍��o�͔����E�g���N�v���\�ȍ����ϋ@�\�̊J�� |
||
|
�@�l�Ԃ̑��s�^���ł́C���r���ɂ����āC�@�r���������˂̂悤�ɐU�镑�����ƁC�A�G�߁C���߂���]�˂̂悤�ɐU�镑�����ƁC
�B�e�ߍ����͑��s���x�ɉ����ĕω����邱�ƁC�Ȃǂ̓��������炩�ɂȂ��Ă��܂��D��������������͋[���ׂ��C����܂ł�CFRP�˂�p�����G�E���ߍ����ϋ@�\���J�����Ă��܂����D
�������C���ʒ��߂Ȃǂ̗��R����C���ߍ����ϋ@�\�ɂ��Ă͎����ł��Ă��܂���ł����D�܂��C����܂łɊJ�������r�@�\�ł́C�߂���������g���N�̌v�����ł����C�^���̕]�����ł��Ȃ��Ƃ�����肪����܂����D �����ŁC�V���Ɋ߃g���N�v������ъߍ����ω����\�ȑ����@�\���J�����܂����D �@��ʓI�ȃg���N�Z���T�ł́C�������̗��Ȃǂ̕ό`���ނ�݂��C���̕ό`�ʂ��v�����邱�ƂŁC�g���N�𐄒肵�Ă��܂��D ���̂��߁C�v���ΏۂƂȂ�d���傫���ꍇ�C�����x�E�������ȕό`���ނ��K�v�ƂȂ�C��^���E���d�ʉ��̌X���ɂ���܂��D �{�@�̂̍ő�g���N�E���ʂ̗v���d�l�͐l�̌v���f�[�^�Ɋ�Â��Č��肵�Ă���C�ő�g���N190[Nm]���v���\����������1.0[kg]�̒��œ��ډ\�ȃZ���T�͑��݂��܂���ł����D �@�����ŁC�y�ʂł���Ȃ��獂���x�ŁC����ό`�����e�\��CFRP�˂�ό`���ނƂ��ė��p���邱�Ƃ��l���܂����D �˂͒��n���̍ő�d�ɑς���v�ł���Ɠ����ɁC��ό`����O��̕��i�ł��邽�ߋ������ނɔ�ׂĒፄ���ł��邱�Ƃ����ɂȂ�܂���D �˂��ߒe���v�f�ƃZ���T�p���ނƂ��Ă̖��������˂邱�ƂŁC�킸���Ȓlj����i�݂̂Ńg���N�v�����������邱�Ƃ��ł��܂����D�ψʃZ���T�ɂ͍�����\���E���������e�Ղŏ��^�y�ʂȂЂ��݃Q�[�W���̗p���܂����D �܂��C�r���S�̗̂v�f�z�u���Č������C�\������͑�ڕ��ɓ��ڂ������[�^����̃p�������쓮�ɂ��s���C���ߍ����ϋ@�\�𑫕��ɓ��ڂ��邱�ƂƂ��C�V���ȑ����@�\���J�����܂����D |
||

Fig. 35 �����ϋ@�\���܂ޑ����@�\�̊T���} |
||
�@ �ȏ�̂��Ƃ���CFig. 18,19 �̂悤�ȋ@�\��v�C���삵�܂����D�����ϋ@�\�E�g���N�v����lj������C�l�Ԃ̑�������1.0[kg]�ɑ��C0.3[kg]�̒��߂ɗ}���邱�Ƃ��ł��܂����D �J�������@�\�ɂ��Đ��\�]���������s�����Ƃ���C�܂��C�����ύX�ɂ��āC���s���̗V�r����0.4[s]�ō����ύX���s���邱�Ƃ��m�F���܂����D �܂��C�g���N�v���ɂ��āC�˂̂Ђ��ݗʂ���̐���ɂ��C�ݒ�l���������x�Ő���\�ł��邱�Ƃ�������܂����D |
||

Fig. 36 �����@�\��CAD�}����ю��@ |
||
|
[�֘A�_��] �E ���ی��C"�r�e�������p�����Q�����s���{�b�g�̂��߂̍��o�͔����E�g���N�v���\�ȍ����ϋ@�\�̊J���C��41����{���{�b�g�w��w�p�u����\�e�W�C3B2-01�C�{�錧�C2023�N9���D |
�� ���o�́C�����ω��\�Ől�ԂƓ����̎��ʓ�����ڎw�������ڋ@�\�̊J�� |
||
|
�@��s�����ⓖ�������Ŏ��{�����l�̉^���v���ɂ��,���s���̐l�Ԃ̋r�͗��r���ɂ����Ĉ��k�˂̂悤�ɐU�镑��,�܂�,���̋r�̕G��,���߂ɂ͉�]�˂Ɠ����悤��
�˓�����L���Ă��邱�Ƃ��������Ă��܂�.������,���̂˓����͑��s���x�ɉ����ĕω����Ă��܂�.�����̓�����͋[����ׂ�,
����܂ł̌����ł͊e�߂� CFRP���̔˂�p�����r�̍����ϊߋ@�\���J���E���ڂ��܂���.
�������Ȃ���,��N�x�J���������ߋ@�\�ł�,�����̗v���������߂Ɏ��ʁE�T�C�Y���Ƃ��ɐl�Ԃ̂��̂Ɣ�ׂďd���傫���Ȃ��Ă��܂��܂���.
������,�V���Ɋ߃g���N,�ςȊߒe�������Ȃ�����y�ʂȑ��ߋ@�\���J�����܂���.
�@�l�Ԃ̑��߂͑��s���x2.0�`5.0[m/s]�ɂ����Ċ߃g���N190[Nm]�C�ߒe��250�`325[Nm/rad]���x�������Ă���C���ڂ̎��ʂ�3.3[kg]���x�ɂȂ��Ă��܂��D �������������邽�߂ɁC��N�x�ł̓_�u�����[�^�⍄���ϋ@�\�C4�߃����N��p���Ă��܂������C���������ڋ@�\���Ɏ��߂�ɂ͏d���Ȃ��Ă��܂����߉����S�̂̔z�u�ɂ��čČ������s���܂����D ��̓I�ɂ͉��ڋ@�\�ɓ��ڂ��Ă������[�^���r�I���ʂ̗]�T�������ڕ��ɍĔz�u���邱�Ƃɂ�艺�ڋ@�\���y�ʉ����邱�Ƃ��ł��܂��D �܂��C4�߃����N�ł͐v�p�����[�^�����Ȃ��˂������܂܂ƂȂ��Ă��܂��Ă��邽�߁C����ɔ˂�Z���ł���悤��5�߃����N��p���܂����D �����\������C������s�����ߋ@�\�ɓ��ڂ��邽�߂ɁC4�߃����N�@�\������Fig. 7�̂悤�� 5��4�ߕ��������N�@�\���l�Ă��܂����D |
||

Fig. 37 5��4�ߕ��������N�@�\��p�������ߋ@�\�̊T���} |
||
�@ �ȏ�̂��Ƃ��l������Fig. 8,9 �̂悤�ȋ@�\��v�C���삵�܂����D����5�߃����N�@�\�̓����ɂ��˂̒�������N�x�̕��Ɣ�ׂ�3�{���x�Z�����邱�Ƃ��ł���悤�ɂȂ�܂����D �����̊J�������@�\�ɂ��Đ��\�]���������s�����Ƃ���C���[�^�h���C�o�̏o�͉\�d���̌��E�ɒB���Ă��܂������߂ɁC�l�Ԃ̏o�̓g���N�������Ƃ͂ł��܂���ł����D �����Đl�Ԃ̉��ڂƔ�r����1.5[kg]���x�d���܂܂ƂȂ��Ă��܂��܂����D�������C��N�x�Ɣ�r����Ɛ��\��傫�������邱�ƂȂ�0.7[kg]���x�y�ʉ����邱�Ƃ��ł��C 5�߃����N�@�\��p���邱�ƂɗL�p�������邱�Ƃ��m���߂邱�Ƃ��ł��܂����D |
||

Fig. 38 ���ߋ@�\��CAD�} |

Fig. 39 ���삵�����ߋ@�\ |
|
|
[�֘A�_��] �E ����S�u���C"���Չ^���ɒ��ڂ����Q�����s���{�b�g�̊J���i��23��F���o�́C�����ω��\�Ől�ԂƓ����̎��ʓ�����L���鉺�ڋ@�\�j�C��37����{���{�b�g�w��w�p�u����\�e�W�C3L3-03�C�����s�C2019�N9���D |
�� �r�e�������p�����G�����ϋ@�\�̊J�� |
||
|
�@����܂ł̌����ŁC�q���[�}�m�C�h���{�b�g�̊ߍ�����\���I�ɕω�������@�\���J�����C
�l�Ԃ̑��s����ɂ�����߂̉�]�˓�����͕킷�鎎�݂��i�߂��Ă��܂����D
�������C�]���̋r�@�\�ł́C�G�����ϋ@�\�̓��ځC�l�ԂƓ����̎��ʓ����C
����ё��s���̍��o�͔������ɖ��������Ƃ�����ł����D
���̂��߁C�V���ɕG�����ϋ@�\���J�����܂����D
�@�]���̍����ϋ@�\�͉d�_������������ʓI�ł������C �{�����ł�Fig�Ɏ����Œ�_��ω�������������̗p���܂����D ���̕����ł́C�Œ�_�Ɖd�_�̊Ԃ̋�����ω������邱�Ƃō����𐧌䂵�C �K�v�ɉ����Ċߍ�����������������邱�Ƃ��\�ł��D �]���̋@�\�ɂ́C�����������ɌŒ�_����������C ���j�A�K�C�h�ƍ\�����ނ��˂ƂƂ��ɋȂ����肪���݂��Ă��܂����D �{�����ł͂����̉ۑ���������邽�߁C���j�A�K�C�h��G�ߎ��̂ɔz�u���C ���ڃt���[���S�̂ʼnd���x����\���Ƃ��܂����D ����ɂ��C�\�����ނ̕ό`��h���C���^���y�ʂȐv���������܂����D Fig�ɐv�����@�\�������܂��D �@���r���ɂ����鍄���s�ϐ����Ռ������ɂ���Ċm�F����C �˂̏_��ɂ��Ռ��z�����ʂ�������܂����D ����ɁC�˂ɂ��o�͌�����ʂ������邽�߂̎����ł́C ����e���v�f�����s���̃G�l���M�[��������Ɋ�^���C�߂̍��o�͉�����������܂����D ����ɂ��C�G�߂̃g���N����ъp���x�̌��オ�m�F����܂����D |
||

Fig. 40 �Œ�_�ړ��������ϋ@�\�T���} |
||

Fig. 41 �G�����ϋ@�\���@ |
|
[�֘A�_��] �E ���V���X���C"�r�e�������p���� 2 �����s���{�b�g�̂��߂̕G�����ϋ@�\�̊J��"�C��42����{���{�b�g�w��w�p�u����\�e�W�C�y3I3-03�z�C���{�C2024�N9���D |
�� �r�e�������p����2�����s���{�b�g�̂��߂̌y�ʁE���o�͔����\�ȋr�@�\�̊J�� |
||
|
�@����܂ł̌����ŁC���s���̐l�Ԃ̋r�ɂ�����G�߁C���߂̉�]�˗l�̂˓������Č����邽�߂ɁCCFRP���̔˂�p���������ϋ@�\���J�����Ă��܂����D
�������Ȃ���C����܂łɊJ�������r�ł́C���̍����ϋ@�\�̓��ځC�l�Ԃ̑��s���̊ߏo�͔����C�l�ԂƓ����̎��ʓ����͕����ł��Ă��炸�C �l�ԂƔ�r���d����o�͂Ȃ��̂ƂȂ��Ă��܂��Ă��܂����D�����ŁC��L�̗v���̕�����ڎw���C�V���ɋr�@�\���J�����܂����D �@�l�Ԃ̋r�̊e���ʂɂ����鎿�ʂ́C��ڕ��ɂ�����8.4[kg]�C���ڕ��ɂ�����3.3[kg]�C�����ɂ�����1.0[kg]���x�ł���C���[�ɂ����Ă��y�ʂƂȂ��Ă��܂��D 2018/19�N�x�ɊJ�����ꂽ�@�̂ł́C���̎��ʓ������Č����邽�߂ɉ����̓��͓`�B�n����V���܂����D5�߃����N�����C ���߃A�N�`���G�[�^���ڕ��Ɉڐ݂������Ƃʼn��ڎ��ʂ�4.8[kg]�܂Œጸ���܂������C�ˑR�Ƃ��Đl�̂̎��ʓ����̍Č��ɂ͕s�\���ł����D �����ŁC�����̋@�B�v�f�z�u�Ɠ��͓`�B�n�ɂ��čČ������s���C�V���ɔ����N�@�\���J���E���ڂ��܂����D �@�����N�@�\�́C��A(�G��)���o�R����B(����)��2������ ������s�����̂ł���C��A�CB�̓���͊����܂���D �ʏ�C��A���o�R���Ă��̐�̊�B���쓮����ꍇ�C��A�̓���Ɗ����Ċ�B�̊p�x���ς���Ă��܂��܂��D �������鐧����s���ꍇ������܂����C�e���v�f�ɂ���Ĕ\���v�f���鍂�o�͓����ڎw���{�����ł́C �e�������܂߂��ߊp�x�̕�������E���g���N�ōs���K�v������\���ȕ���ł��Ȃ����߁C�{�@�\�ɂ�铮�͓`�B���L���ł��D �p�������@�\�Ƒg�ݍ��킹�C��r�I��o�͂��y�ʂȃA�N�`���G�[�^�ő�ڕ����瑫�߂�2�������쓮���邱�ƂŁC�y�ʂȋr���������܂����D �@����ɁC�t���[���\�������V���C�䋭�x�������P��̕��ނ����i�Ɏg�p��������i�����s���܂����D ���s���̏Ռ��d���[�h���z�肵�C���n���ɂ��悻3000[N]�Ƒz�肳���Ռ��d�Ɋւ��ăV�~�����[�V���������{���܂����D ����ɂ���āC�œK�ȍ��i�`��Ƃ��Ē��~�f�ʂ̃p�C�v��I�肵�܂����D |
||

Fig. 42 ���ߊp�x�ւ̕G�ߊp�x�̊��� |
||

Fig. 43 �����N�@�\�̊T���} |
||
�@�ȏ�܂��CFig�̂悤�ȋr�@�\��v�E���삵�܂����D���ʂ͑�ڕ���9.8[kg]�C���ڕ���2.8[kg]�C������1.3[kg]�ƂȂ��Ă���C�l�̂̎��ʓ����Ƃ̍��ق��͂��ɗ}����ƂƂ��ɁC�]�����ʒ��߂̒������������ڂ͑啝�Ɍy�ʂƂȂ�܂����D �@�J�����������N�@�\�ɂ��ĕ]�����s�����Ƃ���C�G�ߊp�x�Ɗ������ɑ��ߊp�x����Ɏw���l��ۂ��Ƃ��ł��C�����N�@�\�̗L�p����������܂����D |
||

Fig. 44 ���삵��CFRP�p�C�v |
||

Fig. 45 �r�@�\���@ |
||
|
[�֘A�_��] �E �Ö쑾�C"�r�e�������p����2�����s���{�b�g�̂��߂̌y�ʁE���o�͔����\�ȋr�@�\�̊J��"�C��41����{���{�b�g�w��w�p�u����\�e�W�C3B2-02�C�{�錧�C2023�N9���D |
�� �g�|���W�[�œK����p�������ωd�E�y�ʂȍ����@�\�̊J�� |
|||
|
�@����܂ł̌����ŁC���s���̐l�Ԃ̍��h���ɂ��Ռ��z���E�R�肾���̕⏕�C
�����ċr���̂ː��𗘗p�������U�^�����Č����邽�߂ɁC
�n�[���j�b�N�h���C�u��p���������R�x�@�\���J�����Ă��܂����D
�������C����܂łɊJ���������Ղł́C2000[N]�̒��n�Ռ��ɑς����鋭�x���m�ۂ��邽�߁C
�@�̏d�ʂ��l�Ԃ̍����d�ʂł���11.4[kg]��1.6�{�ł���C�l�Ԃ̎��ʓ������Č��ł��Ă��Ȃ��܂���ł����D
�d�ʂ̒��߂͒��n�Ռ��̑�����C�^�����̏o�͕s���̌����Ƃ��Ȃ�܂��D
�����ŁC�ωd���̌���ƌy�ʉ���ړI�Ƃ��C�A�N�`���G�[�^�ƌ����@���Č������C
�g�|���W�[�œK�������p�����t���[���\�����J���E���ڂ��܂����D
�@�l�Ԃ̑��s���ɂ�1000[W]�̏o�͂�v���܂��D ����́C���������ŊJ�����ꂽ2�����s���{�b�g�ł���WABIAN-2R�̏o�͂�150W���x�ł��邱�Ƃ���킩��悤�ɑ�o�͂ł���C �������ł͋r�̂ː��ɂ��e���G�l���M�[�̊��p���������C�匸���ɂ�胂�[�^�g���N�����Ă��܂��D ���̂��߂ɓ��ڂ��ꂽ�n�[���j�b�N�h���C�u�̓t���N�X�v���C���ƌĂ�锖�����Ԃ̒e���ό`�𗘗p���������@�ŁC ��������C�������C��o�b�N���b�V���Ȃǂ̃����b�g������܂����C ���̍\����C���s���̒��n�Ռ��ł͖��Ղ�j�f�̃��X�N������܂��D �����ŁC�匸�������ωd���̑啝�Ȍ��オ�\�ȃE�H�[���M�A�𓋍ڂ��܂����D ���̂Ƃ��C���[�^�ƍ��킹���I��E�v���s���C�ωd���ƌy�ʉ��̗�����}��܂����D ��ʓI�ɁC�o�͂Əd�ʂ̓g���[�h�I�t�̊W�ɂ���C�v���o�͂�B�����郂�[�^�o�͂ƌ�������p�^�[����r���邱�ƂŁC �S�d�ʂ��ŏ��ƂȂ�v���������Ă��܂��D �@����ɁC�t���[���̓g�|���W�[�œK���V�~�����[�V������p�����`����̗p���܂����D �]���̃t���[���v�ł����������̍H�v�͍s���Ă��܂������C ���s���̉d�ɑ��čœK�Ȍ`�����͓I�ɋ��߂邱�ƂŁC�ωd����ۂ��Ȃ���d�ʂ̍팸��ڎw���܂����D �͂̉�͂͐l�Ԃ̑��s���̗͊w���f������Ɏ��{���C ���s���̉d�����ɂ�����œK�Ȉʑ��̕��z�����ς��܂����D �@�ȏ�܂��CFig�̂悤�ȍ��Ջ@�\��v�E���삵�܂����D �e�߂ɂ�����ωd���͕��ς�3.7�{�Ɍ��サ�C���ʂ�13.8[kg]��22[%]�̍팸��B�����܂����D �J�������@�̂�p����������������{���C�@�̂����s���ɕK�v�ȏo�͂������n�Ռ��ɑς����邱�Ƃ��m�F���܂����D �{�v��@�̓K���ɂ��C�@�̑S�̂̍X�Ȃ�y�ʉ����\�ł��邱�Ƃ�������܂����D |
|||

Fig. 46 �͊w���f���ɂ�����͂̉�� |
|||

Fig. 47 �g�|���W�[�œK���̗l�q |

Fig. 48 �g�|���W�[�œK�������p�����t���[���`�� |
||

Fig. 49 ���Ջ@�\���@ |
|||
|
[�֘A�_��] �E ���R�G�L���C"���Չ^���ɒ��ڂ����q���[�}�m�C�h�̂��߂̍��ωd�E�y�ʂȍ����@�\�̊J��"�C��42����{���{�b�g�w��w�p�u����\�e�W�C�y3I3-05�z�C���{�C2024�N9���D |
�� �Q�����s���{�b�g�ւ̓��ڂɌ����������쓮�Ҋߋ@�\�̊J�� |
|||
|
�@���s���̐l�Ԃ̌Ҋ߂ɂ����āC�G�߂⑫�߂Ɍ�����悤�Ȃ˓����͂��܂茩��ꂸ�C�G�߂⑫�߂����傫���߃g���N�����邱�Ƃ��������Ă��܂��D
�������C�傫�Ȋ߃g���N������ɂ͓d�����[�^�ƌ����@����^������K�v������C���s�̑��s���{�b�g�̌Ҋߋ@�\�́C�l�ԂƓ����̎��ʔz�u�����A�N�`���G�[�^�̂����ő�̂��̂�p���Ă���C
�l�Ԃ����s���瑖�s�ɑJ�ڂ��鋫�E�Ƃ�����ړ����x��2.0[m/s]���̌Ҋ߂̊߃g���N100[Nm]�C����ъߊp���x4.5[rad/s]�̔����������ł��Ă��܂���ł����D
�����ŁC�Ҋ߂̏o�͌���̂��߂ɖ����쓮��K�p�����Ҋߋ@�\���J�����܂����D
�@�����쓮�͍��o�͔��������҂ł��߂��痣�ꂽ�ӏ��ɖ����@���z�u�ł���_�ŁC�����@��p�����`�B�@�\�Ɣ�r���ă��C�A�E�g���������ł��D ����ɁC���̕����E�������ɂ����̃|���v���畡���̊߂ւ̏o�͔z�����\�ł��D �����̖����쓮�̗��_���������C���r�ɑ��č��E�œƗ��Ɏ�������������H��d���؊��قɂ��ڑ����C�o�͔z�����\�ȂQ���q���[�}�m�C�h���{�b�g����������H���Ă��܂����iFig. 10�j�D �܂��C�����A�N�`���G�[�^�ɂ͖������[�^�Ɣ�r���Ď��ʑΏo�͂��傫�������V�����_���̗p���C�v�����p�̎����̂��߂ɂ�4�߃����N�@�\���̗p���܂����iFig. 11�j�D �����N�@�\�̊p�x�ω��͈�ʓI�ɃV�����_�X�g���[�N�ɑ��Ĕ���`�ƂȂ邽�߁C�ߊp�x�̃t�B�[�h�t�H���[�h����ƃt�B�[�h�o�b�N���䂪�e�ՂɂȂ�悤�ɁC�����N�������ŏ����@�ɂ����`�ɋ߂Â��܂����D ����ɂ��C�V�����_�X�g���[�N150[mm]�C���p120[deg]�ɑ��čő卷��3.9[deg/mm]�ƂȂ郊���N��܂����D �@�ȏ�̌�������J�����������쓮�Ҋߋ@�\(Fig. 13�CFig. 14)��]�����邽�߁C�ő唭���g���N�Ɗp���x���m�F����������s���܂����D �߃g���N�͗v���d�l���������̂́C�ߊp���x�͗v���d�l�����܂���ł����D ����͖�����H�̘A���ɂ�闬�ʑ������l�������z�ǂ̐v���s��Ȃ��������߁C���ʑ������ɔz�ǒ�R���㏸���C�|���v���ő��]���x�ɓ��B����O�Ƀ|���v���쓮���郂�[�^�̏o�͏���ɓ��B�������߂ł��D |
|||

Fig. 50 ��Ė�����H |

Fig. 51 4�߃����N�@�\ |
||

Fig. 52 �Ҋߋ@�\CAD�} |

Fig. 53 ���삵���Ҋߋ@�\ |
||
|
[�֘A�_��] �E ����p�I���C"���Չ^���ɒ��ڂ����Q�����s���{�b�g�̊J���i��24��F�Q�����s���{�b�g�ւ̓��ڂɌ����������쓮�Ҋߋ@�\�̊J���j�C��37����{���{�b�g�w��w�p�u����\�e�W�C3L3-04�C�����s�C2019�N9���D |
|
���������҂ł�������c��w�X�|�[�c�Ȋw�w�p�@���搶�Ɋ��ӂ������܂�. �{����������c��w���H�w���������������c��w�q���[�}�m�C�h�������C�����@�B�H�w���́E�ЂƁE���ƌ������C����c��w�d�_�̈挤���@�\�A�N�e�B���E�G�C�W���O������, ����c��w�q���[�}���p�t�H�[�}���X�������C����c��w�����ネ�{�b�g�����@�\�̉��Ŏ��{���ꂽ�D�{�����ŗp����ꂽ3DCAD ���\���b�h���[�N�X�E�W���p���������������C�P�[�u���E�R�l�N�^����d��������C�����̈敨�����f���V�~�����[�^ MapleSim ���T�C�o�l�b�g�V�X�e����������i�J����:Maplesoft �Ёj�����ꂽ�D�܂��C�{�����̈ꕔ�͕����Ȋw�Ȃ̉Ȋw������⏕���i25709019, 17H00767�j�C�����Ȋw�ȃO���[�o�� COE �v���O�����u�O���[�o�����{�b�g�A�J�f�~�A�v�C�݂��يw�p�U�����c�C����c��w����ۑ茤��������i2015S-76�j�̎x�������D�e�ЁE�������Ɋ��Ӓv���܂��D |
