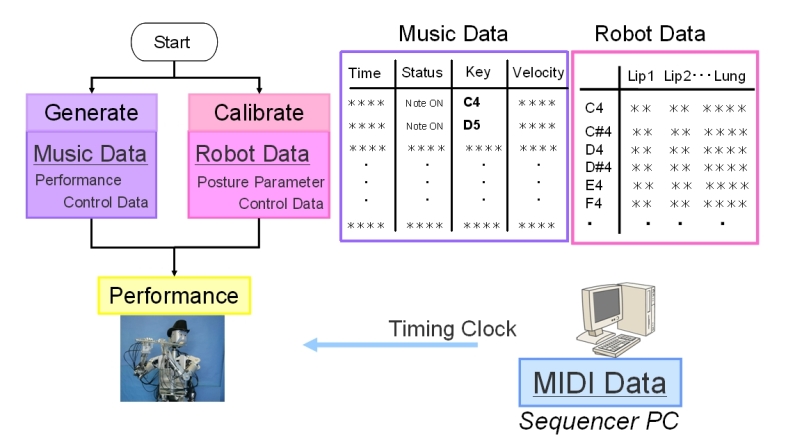
The MIDI accompaniment system of WF-4R consists of two computers
to control the robot’s musical performance: one for controlling the robot
and the other one to generate the accompaniment MIDI data. Both computers
are connected by the MIDI system, and the synchronization of the performance
is achieved by using the timing clock from the MIDI signal.
| Copyright (c) 2005-2006 Team FLUTE / Takanishi Laboratory |
| All rights reserved. |
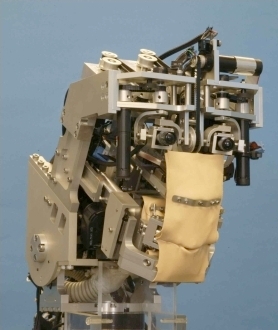
This mechanism has 5-DOFs to accurately control the air beam direction.
The upper lip has 3-DOFs and the lower lip has 2-DOFs. Therefore, it is
possible to control the width and thickness of the air beam by controlling
the movement of each lip.
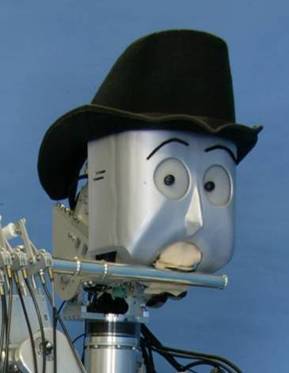
The eye system has 3-DOFs where two CCD cameras were attached. Using this
system,the robot may collaborate with musical partners and interact with
the audience during a performance.
The lungs system has two vane. The total capacity of the lungs is 8.20×10-1[m3] which is almost equal to a male adult
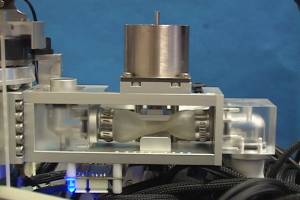
The vibrato mechanism is composed by a voice coil motor to reduce the
size and weight of this unit, which it has been installed on the rear of
the neck.
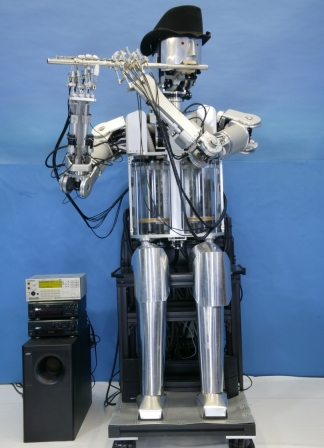
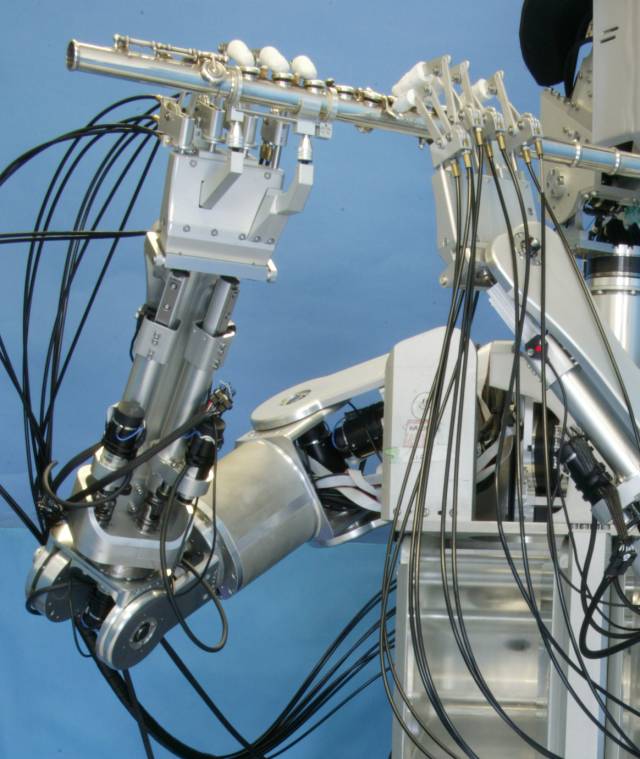
Each finger consists of alink mechanism actuated by DC servomotors with pulley and wire. All fingers can open and close the flute key in 8[Hz]. The flute is completely fixed to the righthand with the flute mount. The arm system has 7-DOFs. The upper arm has 4-DOFs and the fore arm has 3-DOFs.
Face design has changed to make it friendly to the audience and musical
partners.
The eyebrow can be freely moved.So, robot can change expression
according to the music type.
Movie:Composed by N.A.Rimsky-Korsakov
A part of this research was conducted at the Humanoid Robotics Institute
(HRI), Waseda University, and part of this was supported by a Grant-in-Aid
for the WABOT-HOUSE Project by Gifu Prefecture.
The neck system was designed to increase the motion range and attitude control of the lips. A harmonic drive gear has been used to achieve high accuracy positioning.
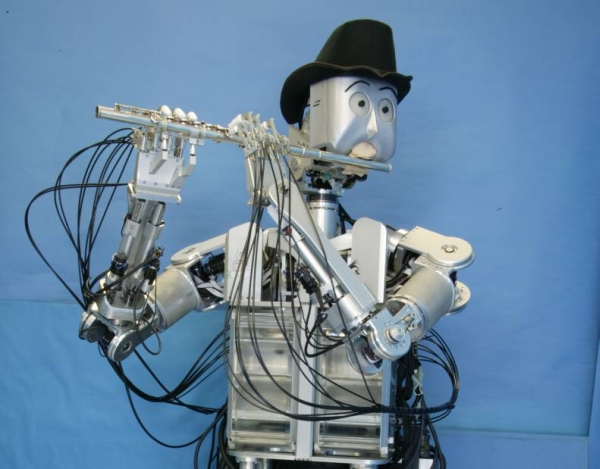
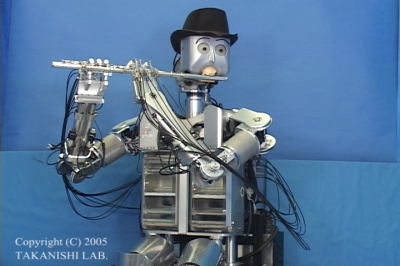
In 2005, we developed the anthropomorphic flutist robot WF-4R(Waseda Flutist
No.4 Refined II) with 43-DOFs.



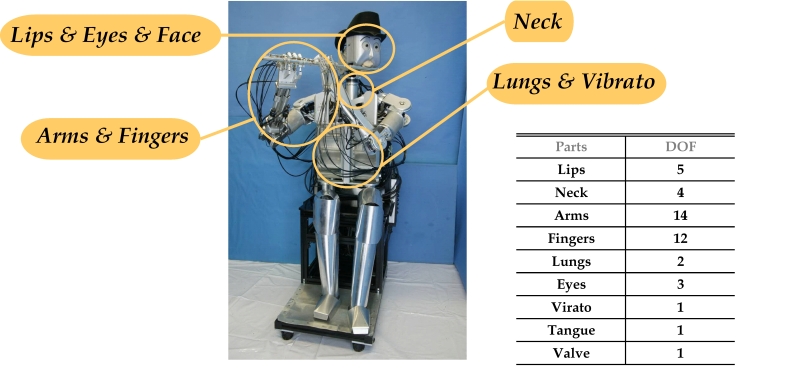

Since 1990, the research of the anthropomorphic flutist robot at Waseda
University has focused on reproducing human organs (lips, lungs, neck,
arms, fingers, tonguing, and vibrato) which are required for flute playing.
The main goal of this research is to clarify the flute playing mechanism
from engineering viewpoint and to enable the communication with humans
at emotional level.
| I. Objective | ||
| II. About WF-4RII | ||
| III. Performance system | ||
| IV. Performance movie | ||
| V. Special thanks |
||
| Musical performance activities | ||
| Paper page |
Anthropomorphic Flutist Robot WF-4RII Japanese Page